基于ADAMS的挖掘式裝載機鏟斗連桿機構優(yōu)化分析
2022-08-09 12:22:24羅運杰黃靜李軍彭學軍湯宇葉志賓
公路與汽運 2022年3期
羅運杰, 黃靜, 李軍, 彭學軍, 湯宇, 葉志賓
(1.中鐵五局集團 第一工程有限責任公司, 湖南 長沙 410117;2.長沙理工大學 汽車與機械工程學院, 湖南 長沙 410114;3.中鐵五局集團有限公司, 湖南 長沙 410007;4.中鐵開發(fā)投資集團有限公司, 云南 昆明 650500)
挖掘式裝載機同時具有挖掘和裝載功能,可用于多種場合。理論挖掘力是衡量挖掘式裝載機挖掘性能的一個重要指標,而挖掘式裝載機鏟斗連桿機構的傳動比直接影響鏟斗的理論挖掘力。該文利用ADAMS對鏟斗連桿機構進行優(yōu)化設計,通過對鏟斗連桿機構尺寸、位置等的優(yōu)化,在一定液壓缸作用力下提升鏟斗連桿機構的傳動比,從而增大挖掘式裝載機的理論挖掘力。
1 挖掘式裝載機鏟斗連桿機構參數(shù)化建模
1.1 選取設計變量
挖掘式裝載機鏟斗連桿機構見圖1。

圖1 挖掘式裝載機鏟斗連桿機構示意圖
設計變量數(shù)量越多,參數(shù)化模型的建立過程越復雜。通過計算分析及不同設計變量選取方案對比,選取8個參數(shù)作為設計變量,分別為θ1(∠BGx)、θ2(∠ACy)、θ3(∠BDy)、α2(∠AGB)、L4、L5、L8、L9。定義設計變量為:
X={x1,x2,x3,x4,x5,x6,x7,x8}T=
{θ1,θ2,θ3,α2,L4,L5,L8,L9}T
根據(jù)圖1,以鉸點G為原點建立坐標系,通過8個設計變量得到各關鍵鉸點的位置為:
G(0,0)
B(L8cosθ1,-L8sinθ1)
A[L9cos(θ1+α2),-L9sin(θ1+α2)]
C[L9cos(θ1+α2)+L4sinθ2,
-L9sin(θ1+α2)-L4cosθ2]
D(L8cosθ1+L5sinθ3,L8sinθ1+L5cosθ3)
1.2 建立連桿機構
大傾角隧洞用履帶挖掘式裝載機的鏟斗連桿機構由圖1所示5個參數(shù)化設計點組成,分別為G點、A點、B點、C點、D點。在ADAMS軟件中輸入各點坐標,創(chuàng)建鉸點,然后用連桿將各鉸點相連,構成連桿機構(見圖2)。
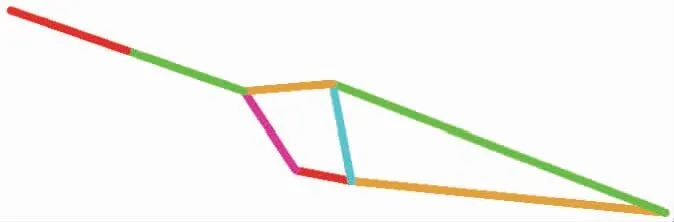
圖2 優(yōu)化前鏟斗連桿機構的虛擬樣機參數(shù)化模型
對各桿的質(zhì)心(MAKER點)進行位置函數(shù)參數(shù)化,使用ADAMS/View中位置函數(shù)表達式:
(LOC_ALONG_LINE(MAKER_1,MAKER_2,
0.5·DM(MAKER_1,MAKER_2)))
用(ORI_ALONG_AXIS(MAKER_2,MAKER_1,"z"))表示質(zhì)心沿z軸方向。
1.3 添加約束副
在鏟斗連桿機構的虛擬樣機模型中,桿GB與地面Ground之間建立轉動副。由于桿GB代表液壓缸驅動,需建立一個移動副。因此,在桿GB的中點處建立一個新的鉸點Point_1,分別連接Point_1和Point_G、Point_1和Point_B,把桿GB拆分成2根連桿,也就是參數(shù)化模型中的Part_G和Part_B,并通過移動副將2根連桿連接起來,達到液壓缸驅動的目的。桿Part_BD與桿Part_B之間在鉸接點B處通過轉動副相連,桿Part_BD和桿Part_CD在鉸接點D處以轉動副相連,桿Part_CD和桿Part_AC在鉸接點C處以轉動副相連,桿Part_AC和桿Part_AB在鉸接點A處以轉動副相連,桿Part_AB和桿Part_BD在鉸接點B處以轉動副相連。因為桿Part_AC在仿真優(yōu)化過程中位置不發(fā)生變化,以桿AC作為機架,將桿Part_AC與地面Ground之間以固定副相連。此外,為保證鏟斗(在模型中表現(xiàn)為三角形CDE)與桿Part_CD固定為一整體,將桿Part_CD、Part_DE和Part_CE之間以固定副兩兩相連。運動副約束見表1。

表1 運動副約束
在ADAMS虛擬樣機模型中模擬液壓缸的移動副(即連接桿件Part_G與桿件Part_B的移動副),需對2個物體及2個帶有方向坐標的MAKER點進行參數(shù)化。采用ADAMS/View設計函數(shù)庫中LOC_ALONG_LINE函數(shù)對MAKER點的位置進行參數(shù)化,采用ADAMS/View設計函數(shù)庫中ORI_ALONG_AXIS函數(shù)對MAKER點的方向進行參數(shù)化,其中一個MAKER點的方向函數(shù)表達式為:
(ORI_ALONG_AXIS(POINT_G,POINT_
1,"x"))
式中:ORI_ALONG_AXIS表示將坐標系按指定方向旋轉至坐標系一軸線與指定軸線方向對齊時所需旋轉角度。
1.4 添加載荷
鏟斗連桿機構的主要載荷有各桿重力Gmi、液壓缸的驅動力Fq、鏟斗的挖掘阻力Fw和挖掘物體的重力G。由于在仿真過程中液壓缸采用位移驅動,不對驅動力作過多分析。在斗齒尖施加理論挖掘阻力,挖掘阻力的方向始終與桿件Part_CE垂直。在提升點位置增加向下的重力代替物料的重力。鏟斗連桿機構各桿的重力只需在ADAMS中修改質(zhì)量函數(shù)即可。
1.5 添加驅動
該鏟斗連桿機構只有一個液壓缸驅動。以連接桿件Part_G與桿件Part_B的移動副模擬液壓缸的驅動,液壓缸采用位移驅動。優(yōu)化設計采用STEP5函數(shù)定義液壓缸的驅動方式,驅動函數(shù)為STEP5(time,0,30,3+40,-400)+STEP5(time,3+40,0,3+40+20,400)。該函數(shù)表達式表示液壓油缸在經(jīng)過30 s時伸出0.43 m,再經(jīng)過20 s時縮回0.4 m。添加驅動后,進行挖掘過程仿真,挖掘過程中液壓缸的行程見圖3。

圖3 液壓缸的行程
2 鏟斗連桿機構的優(yōu)化
2.1 建立目標函數(shù)
挖掘式裝載機的挖掘方式一般有鏟斗挖掘、斗桿挖掘及復合挖掘,其中鏟斗挖掘最常見,最大理論挖掘力也在這種工作狀態(tài)下出現(xiàn)。而在鏟斗液壓缸作用力一定時,挖掘機鏟斗的理論挖掘力與鏟斗連桿機構的傳動比有關,鏟斗連桿機構的傳動比越大,鏟斗的理論挖掘力越大。因此,優(yōu)化設計的目標是在鏟斗液壓缸工作壓力恒定時,盡可能增大挖掘機的理論挖掘力。以鏟斗連桿機構的傳動比為目標函數(shù),通過計算得目標函數(shù)的表達式為:
(1)
式中:r1為A點到GB的垂直距離;r3為C點到BD的垂直距離;r2為A點到BD的垂直距離;L1為CE的長度;L6為AB的長度;L3為CD的長度。
2.2 建立約束條件
2.2.1 邊界約束(設計變量的約束幅度)
根據(jù)鏟斗連桿機構在工程實際中的應用情況,各桿長度和桿件之間的邊界約束表達式為:
(2)
設計變量的取值范圍可直接通過上下限來限定,不需對其表達式進行特殊轉換。根據(jù)挖掘式裝載機整機虛擬樣機的尺寸,設計變量的初始值及取值范圍見表2。

表2 設計變量的初始值及取值范圍
2.2.2 傳動角約束
為保證連桿機構的運動需要,對鏟斗連桿機構的傳動比進行約束。鏟斗連桿機構是四邊形連桿機構,為避免機構頂死和運動不確定情況,確定鏟斗液壓缸的傳動比范圍為10°~170°、連桿機構的傳動角范圍為30°~170°,即:
10°≤∠ABG≤170°
(3)
30°≤∠BDC≤170°
(4)
2.2.3 幾何約束
為能在任何情況及仿真的任一過程、任一位置都使所有運動三角形和四邊形成功建立,進行幾何約束。鏟斗連桿機構優(yōu)化設計應滿足△ABG、△FAC、四邊形ABCD的內(nèi)角和定理,約束函數(shù)如下:

(5)
2.3 設計變量對目標函數(shù)的敏感度分析
鏟斗連桿機構優(yōu)化設計涉及的變量有θ1、θ2、θ3、α2、L4、L5、L8、L9,變量較多,會影響優(yōu)化效率。為保證效率,進行設計變量對目標函數(shù)的敏感度分析。根據(jù)設計變量的不同取值,通過ADAMS進行仿真計算,得到設計變量取初值時對目標函數(shù)的靈敏度,選擇靈敏度高的設計變量作為關鍵設計變量。分析結果見表3。

表3 設計變量對目標函數(shù)的敏感度分析
由表3可知:設計變量θ2、θ3、L8、L9對目標函數(shù)的敏感度較大,選擇這4個變量作為優(yōu)化的關鍵變量。
2.4 優(yōu)化結果
使用SQP優(yōu)化器進行迭代計算,得到表4所示優(yōu)化分析結果。

表4 優(yōu)化分析結果
由表4可知:經(jīng)過優(yōu)化,在設計變量變化不大的情況下,鏟斗挖掘過程中鏟斗連桿機構的最大傳動比由0.241 5提高到0.362 9,提升50.27%,即鏟斗挖掘過程中最大理論挖掘力提升50.27%。
優(yōu)化后鏟斗連桿機構的ADAMS模型見圖4,優(yōu)化前后鏟斗挖掘過程中鏟斗連桿機構的傳動比對比見圖5。由圖5可知:優(yōu)化后鏟斗連桿機構的傳動比比優(yōu)化前明顯提高,最大傳動比提高50.27%。通過較小地改變鏟斗連桿機構的尺寸,使其傳動比得到大幅提升,優(yōu)化效果顯著。

圖4 優(yōu)化后鏟斗連桿機構的虛擬樣機參數(shù)化模型

圖5 優(yōu)化前后傳動比對比
優(yōu)化前后鏟斗挖掘角度的變化范圍對比見圖6。由圖6可知:優(yōu)化前鏟斗挖掘角度的變化范圍為171°~280°,優(yōu)化后為171°~320°,挖掘范圍擴大,優(yōu)化效果明顯。
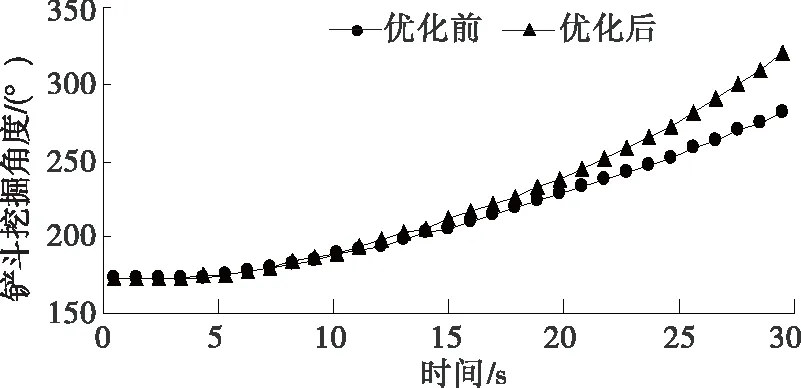
圖6 優(yōu)化前后鏟斗挖掘角度變化范圍對比
3 結語
基于ADAMS對挖掘式裝載機的鏟斗連桿機構進行優(yōu)化設計。通過計算各鉸點的位置建立鏟斗連桿機構參數(shù)化模型,確定設計變量、目標函數(shù)和約束條件,并通過敏感度分析確定優(yōu)化中的關鍵設計變量。利用ADAMS軟件對鏟斗連桿機構進行優(yōu)化,得到新的參數(shù)值并建立新的鏟斗連桿機構參數(shù)化模型。優(yōu)化后鏟斗連桿機構的最大傳動比提升50.27%,即挖掘式裝載機的理論挖掘力提升50.27%,鏟斗挖掘范圍也擴大,優(yōu)化效果顯著。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
