多經(jīng)緯儀跟蹤探空氣球的空中風(fēng)場(chǎng)反演方法
2022-08-08 00:52:24劉金波楊偉偉李健兵
激光與紅外 2022年7期
周 潔,高 航,劉金波,楊偉偉,李健兵
(1.國(guó)防科技大學(xué)電子科學(xué)學(xué)院,湖南 長(zhǎng)沙 410073;2.海軍91236部隊(duì),遼寧 葫蘆島 125100)
1 引 言
風(fēng)是日常生活中最常見(jiàn)的一種自然現(xiàn)象,它無(wú)時(shí)不在,無(wú)處不有,并且對(duì)人類生產(chǎn)生活產(chǎn)生巨大的影響,因此對(duì)于風(fēng)場(chǎng)的精確感知意義重大。在航空氣象領(lǐng)域,準(zhǔn)確掌握精細(xì)的三維風(fēng)場(chǎng)信息,能為飛機(jī)安全起降提供重要支撐。目前,用于風(fēng)場(chǎng)探測(cè)技術(shù)主要包括探空氫氣球、測(cè)風(fēng)儀、風(fēng)廓線雷達(dá)以及激光雷達(dá),其中探空氫氣球具有攜行方便、操作簡(jiǎn)單、探測(cè)便捷等優(yōu)點(diǎn),成為高空氣象探測(cè)和其他方式真值比對(duì)的主要手段之一,在國(guó)內(nèi)外氣象行業(yè)得到了廣泛運(yùn)用[1-4]。
探空氫氣球探測(cè)方式是利用經(jīng)緯儀連續(xù)跟蹤探空氫氣球獲得風(fēng)場(chǎng)信息,目前經(jīng)緯儀實(shí)施空中風(fēng)探測(cè)的主要方法有單經(jīng)緯儀測(cè)風(fēng)和雙經(jīng)緯儀基線測(cè)風(fēng)方法。其中,單經(jīng)緯儀測(cè)風(fēng)通過(guò)獲取特定時(shí)間內(nèi)的探空氫氣球的仰角和方位角數(shù)據(jù),經(jīng)過(guò)一定算法解算得到相應(yīng)高度的空中風(fēng)數(shù)據(jù),使用方便靈活、準(zhǔn)備時(shí)間短、操作人員少,便于在各種地形條件下完成作業(yè)任務(wù),在氣象野外、伴隨保障中仍然發(fā)揮著較大作用[5-6]。但單經(jīng)緯儀測(cè)風(fēng),需設(shè)定恒定氣球升速的假設(shè),以此來(lái)進(jìn)行風(fēng)速的反演,因此測(cè)量結(jié)果受各項(xiàng)誤差源影響較大,準(zhǔn)確度稍差[7-8]。雙經(jīng)緯儀基線測(cè)風(fēng)同時(shí)使用兩臺(tái)光學(xué)測(cè)風(fēng)經(jīng)緯儀觀測(cè)氫氣球的運(yùn)動(dòng),讀出仰角、方位角然后利用三角法或矢量法計(jì)算氫氣球高度和風(fēng)向、風(fēng)速[9]。雙經(jīng)緯儀基線測(cè)風(fēng)方法能夠克服恒定升速假設(shè)這一問(wèn)題,有效提高數(shù)據(jù)的準(zhǔn)確度和精度,但其對(duì)基線長(zhǎng)度和方向的選取直接影響風(fēng)向風(fēng)速計(jì)算的準(zhǔn)確度[10]。
此外,無(wú)論是單經(jīng)緯儀還是雙經(jīng)緯儀在計(jì)算空中風(fēng)場(chǎng)信息時(shí),均預(yù)先假定氫氣球?yàn)轱L(fēng)場(chǎng)的良好示蹤物,其運(yùn)動(dòng)狀態(tài)與背景風(fēng)場(chǎng)一致。但氫氣球雖然質(zhì)量較小,但體積較大,在速度變化較大時(shí),較顯著的存在氫氣球的運(yùn)動(dòng)狀態(tài)與實(shí)際風(fēng)場(chǎng)不一致現(xiàn)象,簡(jiǎn)單地將二者近似相等與實(shí)際不符,因此應(yīng)當(dāng)采用一定的反演算法從氫氣球運(yùn)動(dòng)狀態(tài)中反演出真實(shí)的背景風(fēng)場(chǎng)數(shù)據(jù)。本文提出一種基于多經(jīng)緯儀的風(fēng)場(chǎng)探測(cè)與反演方法(MTLM),通過(guò)一定的坐標(biāo)變換與最小二乘法方法,獲取氫氣球的精確軌跡信息。隨后通過(guò)氫氣球運(yùn)動(dòng)狀態(tài)方程,基于曳力表達(dá)式,實(shí)現(xiàn)了由氫氣球速度對(duì)于背景風(fēng)場(chǎng)速度的反演。經(jīng)過(guò)仿真與外場(chǎng)實(shí)測(cè)實(shí)驗(yàn),驗(yàn)證了本方法對(duì)于反演背景風(fēng)場(chǎng)具有較高的性能。
2 基本原理
風(fēng)傳統(tǒng)氫氣球觀測(cè)方法一般基于兩個(gè)前提假設(shè)條件:①氣球在整個(gè)觀測(cè)過(guò)程中保持恒定升速;②氫氣球是背景風(fēng)場(chǎng)的良好示蹤物。但在實(shí)際中,這些假設(shè)并不能夠成立,特別是在復(fù)雜風(fēng)場(chǎng)情況下,可能會(huì)導(dǎo)致較大的觀測(cè)誤差。為解決上述問(wèn)題,本文提出一種基于多經(jīng)緯儀觀測(cè)探空氫氣球的風(fēng)場(chǎng)反演方法,該方法主要涉及兩個(gè)創(chuàng)新點(diǎn):①多個(gè)經(jīng)緯儀協(xié)同觀測(cè)探空氫氣球并通過(guò)坐標(biāo)變化及最小二乘法擬合獲得其軌跡和速度;②考慮氫氣球的慣性作用,采用運(yùn)動(dòng)方程分析準(zhǔn)確地反演背景風(fēng)。
在介紹新方法之前,首先分析傳統(tǒng)方法的原理和局限。
2.1 氫氣球受力分析
單經(jīng)緯儀觀測(cè)探空氫氣球方式如圖1所示,以經(jīng)緯儀位置為坐標(biāo)原點(diǎn),建立笛卡爾坐標(biāo)系,X軸以正東為正方向;Y軸以正北為正方向;Z軸以垂直向上為正方向;θ為以正北順時(shí)針?lè)较驗(yàn)檎较虻姆轿唤?φ為以垂直向上為正方向的高度角。氫氣球在自由大氣中做上升運(yùn)動(dòng)時(shí),將受到由于空氣與氫氣間密度差所產(chǎn)生的浮力Ff,氫氣球自身及附屬物和氫氣的總重力G,以及曳力fd。忽略氫氣球體積和空氣密度的變化,氫氣球所受浮力和重力保持不變,曳力大小與氫氣球和空氣相對(duì)速度成正比。因此當(dāng)氫氣球在初始浮力作用下,具有了豎直向上的加速度,曳力隨著速度的增加而增大,當(dāng)浮力、重力和曳力達(dá)到平衡狀態(tài)時(shí),氫氣球此時(shí)處于勻速上升狀態(tài),將保持固定升速上升。

圖1 單經(jīng)緯儀觀測(cè)氫氣球示意圖Fig.1 Schematic diagram of hydrogen balloon observation with single theodolite
2.2 空中平均風(fēng)計(jì)算

(1)
(2)
(3)
(4)
2.3 氫氣球作為風(fēng)場(chǎng)示蹤物
實(shí)際使用單經(jīng)緯儀進(jìn)行空中風(fēng)觀測(cè)時(shí),使用氫氣球作為風(fēng)場(chǎng)的示蹤物,需忽略氫氣球本身的慣性和曳力,并且需滿足固定的升速vup,但這種假設(shè),實(shí)際中并不成立,而慣性則是決定氣球的運(yùn)動(dòng)狀態(tài)中的重要參數(shù)。慣性是表示流體對(duì)物體運(yùn)動(dòng)影響的關(guān)鍵參數(shù),通常用斯托克斯數(shù)來(lái)評(píng)估慣性[11]。根據(jù)斯托克斯數(shù)公式St=t0u0/L0,其中t0=ρdD2/18μ為物體的弛豫時(shí)間,u0為流體通過(guò)物體時(shí)的流速,L0為物體的特征尺寸,ρd為物體密度,D為物體直徑,μ為氣體的黏度。如果St?1,慣性則可以忽略;否則,慣性強(qiáng)度很大,物體就不能成為背景風(fēng)場(chǎng)的良好示蹤物。因此在標(biāo)準(zhǔn)氣壓101.325 kPa、溫度為25℃的條件下,空氣密度為1.169 kg/m3,粘度為1.8448×10-5Pa·s,氫氣密度0.081 kg/m3,直徑為0.5 m、運(yùn)動(dòng)速度為2 m/s的氫氣球斯托克斯數(shù)約為243,遠(yuǎn)大于1,所以實(shí)際情況下氫氣球的慣性不能再忽略。在氫氣球飛行過(guò)程中,在背景風(fēng)場(chǎng)的作用下必然會(huì)產(chǎn)生曳力(空氣阻力),導(dǎo)致受力的不平衡,無(wú)法保持固定的升速vup。若此時(shí)仍按單經(jīng)緯儀的方式進(jìn)行觀測(cè),所得到的空中風(fēng)場(chǎng)將與真實(shí)背景風(fēng)場(chǎng)具有一定的誤差。
3 多經(jīng)緯儀風(fēng)場(chǎng)探測(cè)
單經(jīng)緯儀風(fēng)場(chǎng)探測(cè)的局限主要有兩點(diǎn):一是假定氫氣球的升速vup固定,但實(shí)際升速無(wú)法保持固定,因此獲得氫氣球的高度值存在較大誤差;二是相對(duì)運(yùn)動(dòng)的存在,使得經(jīng)緯儀觀測(cè)的氫氣球速度不能夠直接代表風(fēng)場(chǎng)的情況。為解決以上問(wèn)題,本文采取多經(jīng)緯儀聯(lián)合觀測(cè)和背景風(fēng)場(chǎng)反演方法實(shí)現(xiàn)對(duì)于風(fēng)場(chǎng)的探測(cè)反演。
3.1 多經(jīng)緯儀聯(lián)合觀測(cè)氫氣球速度原理
多經(jīng)緯儀聯(lián)合觀測(cè)的方法放置成如圖2所示,經(jīng)緯儀之間的距離在60~100 m之間均可,夾角控制在60°~90°左右。觀測(cè)前預(yù)先確定相應(yīng)經(jīng)緯儀之間的方位角和高度角,以及至少1條邊的距離D1,θij表示為第i個(gè)經(jīng)緯儀觀測(cè)第j個(gè)經(jīng)緯儀的方位角。
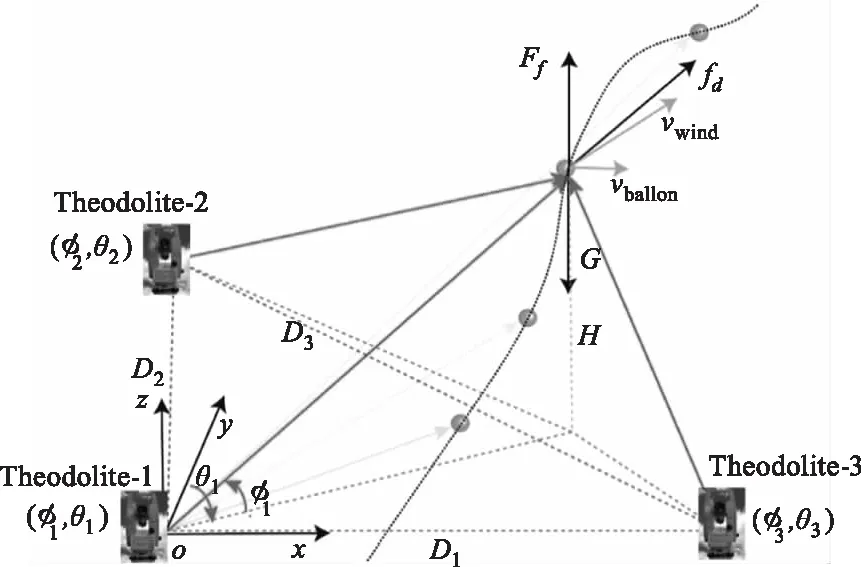
圖2 三經(jīng)緯儀觀測(cè)氫氣球示意圖Fig.2 Schematic diagram of hydrogen balloon observation with three theodolite
以其中1個(gè)經(jīng)緯儀位置為坐標(biāo)原點(diǎn)Ο(0,0,0)建立笛卡爾坐標(biāo)系,(Xm,Ym,Zm)表示為第m個(gè)經(jīng)緯儀的坐標(biāo),(xn,yn,zn)表示為第n次觀測(cè)時(shí)氫氣球的坐標(biāo)。根據(jù)三角形正弦公式可求得各經(jīng)緯儀的相對(duì)距離,并進(jìn)一步轉(zhuǎn)化為笛卡爾坐標(biāo)系下的各經(jīng)緯儀的坐標(biāo)值(Xm,Ym,Zm)。
(5)
(6)

當(dāng)完成多次MTLM觀測(cè)后,可以得到多個(gè)氫氣球空中位置,通過(guò)多項(xiàng)式擬合方法獲得氫氣球在觀測(cè)時(shí)間段內(nèi)的完整運(yùn)動(dòng)軌跡S(t),對(duì)其關(guān)于時(shí)間求導(dǎo)即得各個(gè)時(shí)刻氫氣球的速度vb(t)如式(7):
(7)
3.2 背景風(fēng)場(chǎng)反演原理
在2.1小節(jié)中,通過(guò)多經(jīng)緯儀聯(lián)合觀測(cè)能夠快速準(zhǔn)確地獲得氫氣球的運(yùn)動(dòng)參數(shù),根據(jù)前文分析,氫氣球的運(yùn)動(dòng)不能直接代表空中風(fēng)的情況,因此需采用一定的算法從氫氣球的運(yùn)動(dòng)信息中提取空中風(fēng)的信息。如圖2所示,根據(jù)氫氣球受力分析,此時(shí)氫氣球受重力G、浮力Ff以及曳力fd,根據(jù)牛頓第二定律可以得到式(8):
(8)
其中,a為氫氣球加速度;m為氫氣球自身及附屬物和氫氣的總質(zhì)量。空氣可看作牛頓流體,因此氫氣球的曳力表達(dá)式[12]為:
(9)
其中,Cd為氫氣球的曳力系數(shù);ρa(bǔ)為空氣密度;D為氫氣球直徑,vw為背景風(fēng)速;vb為氫氣球速度。根據(jù)浮力公式Ff=ρa(bǔ)gV以及重力公式G=mg,將其代入公式(8)可得:
(10)
其中,V為氫氣球體積。
氫氣球在低空開(kāi)始上升時(shí),可以通過(guò)控制質(zhì)量,在豎直方向上使得氫氣球處于的平衡狀態(tài),此時(shí)加速度為a=0,可得到平衡狀態(tài)下的氫氣球上升速度:
(11)
當(dāng)已知?dú)錃馇虺跏紕蛩偕仙乃俣葧r(shí),忽略氫氣球體積改變以及空氣密度的變化,可以近似認(rèn)為氫氣球的曳力系數(shù)在上升過(guò)程中保持不變,因此可求得氫氣球的曳力系數(shù)為:
(12)
將式(9)、式(12)代入式(8)可以得到氫氣球運(yùn)動(dòng)狀態(tài)方程:
(13)
根據(jù)3.1小節(jié)獲得的氫氣球速度信息,和a=dvb/dt獲得加速信息,由上式求出δv的三個(gè)分量δvx,δvy,δvz,進(jìn)一步地,由關(guān)系式δv=vw-vb,即vw=vb+δv可以得到背景風(fēng)速vw。
4 仿真實(shí)驗(yàn)
4.1 仿真設(shè)置
仿真氫氣球在背景風(fēng)場(chǎng)控制下的移動(dòng)軌跡,設(shè)置仿真背景風(fēng)場(chǎng)為:
(14)
其中,Uturb代表分布于整個(gè)空間中耗散率為5×10-3m2/s3的湍流速度[13];Ushear代表如圖3所示分布于整個(gè)空間的非線性風(fēng)切變的速度。
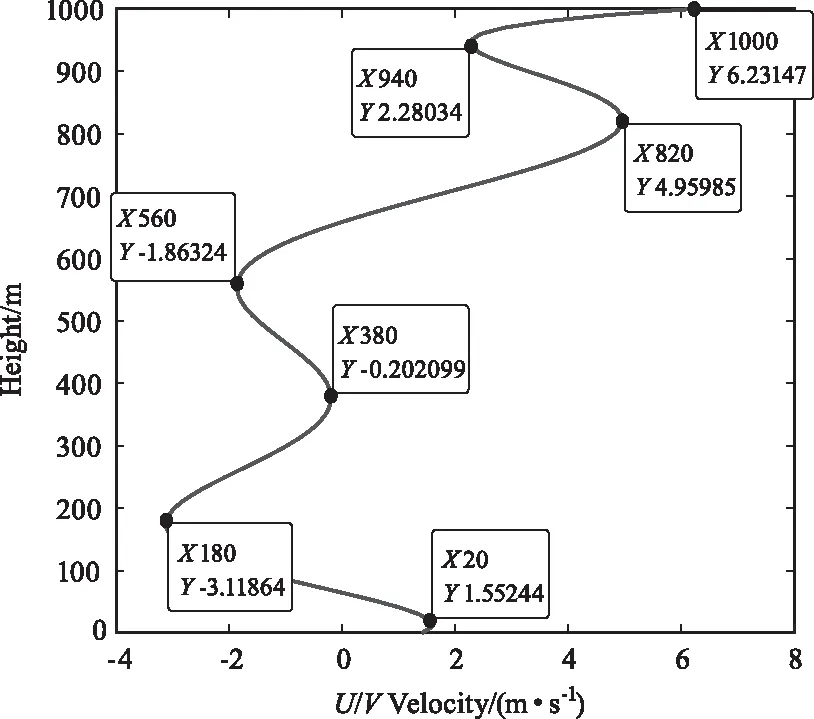
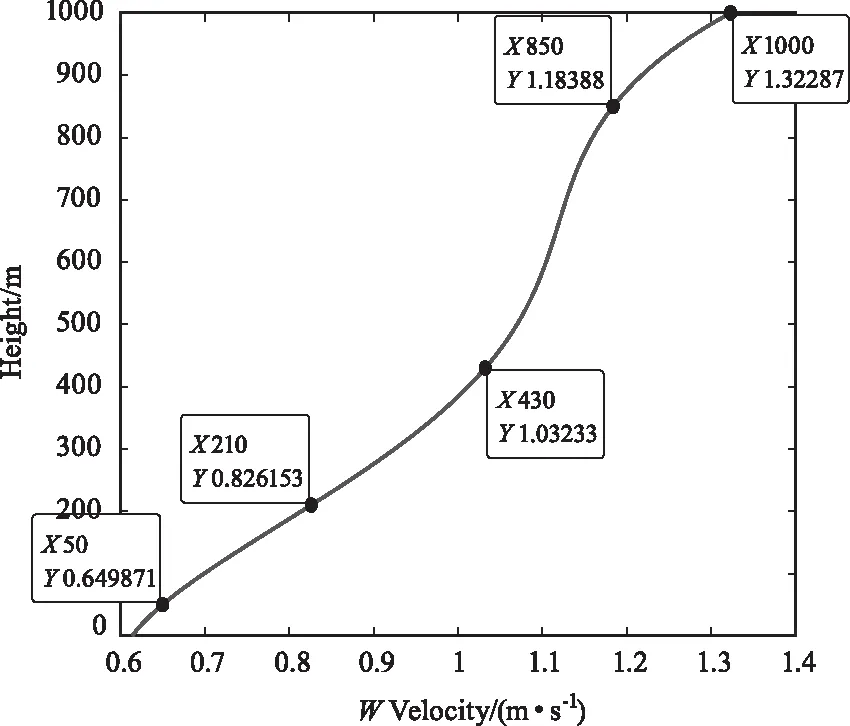
圖3 非線性風(fēng)切變變化示意圖Fig.3 Schematic diagram of nonlinear windshear
仿真氫氣球及附屬物重70 g,直徑為50 cm,假設(shè)氫氣球?yàn)槔硐?滑球體,曳力系數(shù)為0.4[14],標(biāo)準(zhǔn)大氣環(huán)境(氣溫0 ℃,1個(gè)標(biāo)準(zhǔn)大氣壓,空氣密度1.293 kg/m3),重力加速度為9.8 m/s2。3個(gè)經(jīng)緯儀如圖2所示擺放,其中2號(hào)、3號(hào)經(jīng)緯儀距1號(hào)經(jīng)緯儀距離均為100 m,相對(duì)方位角分別為30°和90°,三個(gè)經(jīng)緯儀坐標(biāo)分別為(0,0,0),(50,86.6,0),(100,0,0)。根據(jù)式(11)獲得其初始平衡速度為1.68 m/s。因此氫氣球初始速度設(shè)為為(2,2,1.68),在背景風(fēng)場(chǎng)作用下,根據(jù)式(13)獲得各方向加速度,可通過(guò)對(duì)加速進(jìn)行積分獲得氫氣球的軌跡:
(15)
4.2 誤差分析
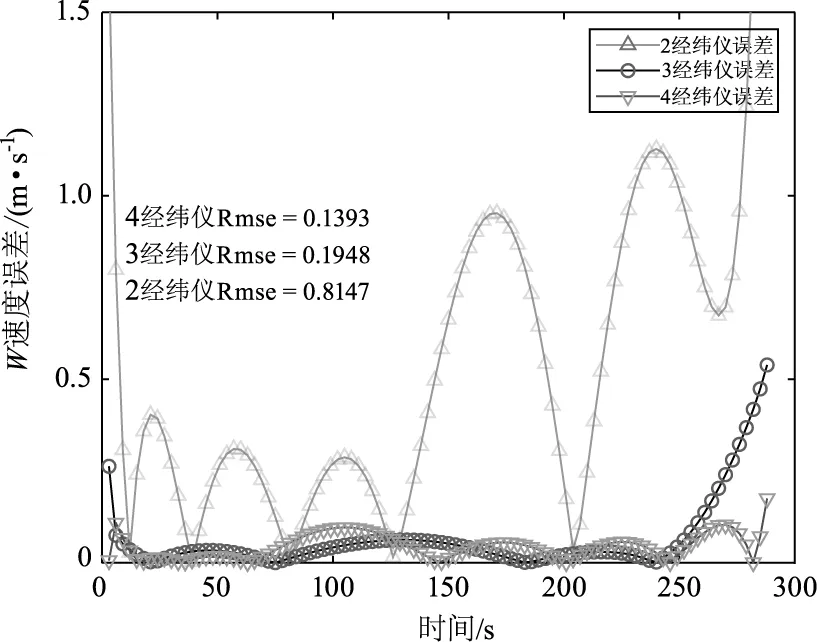
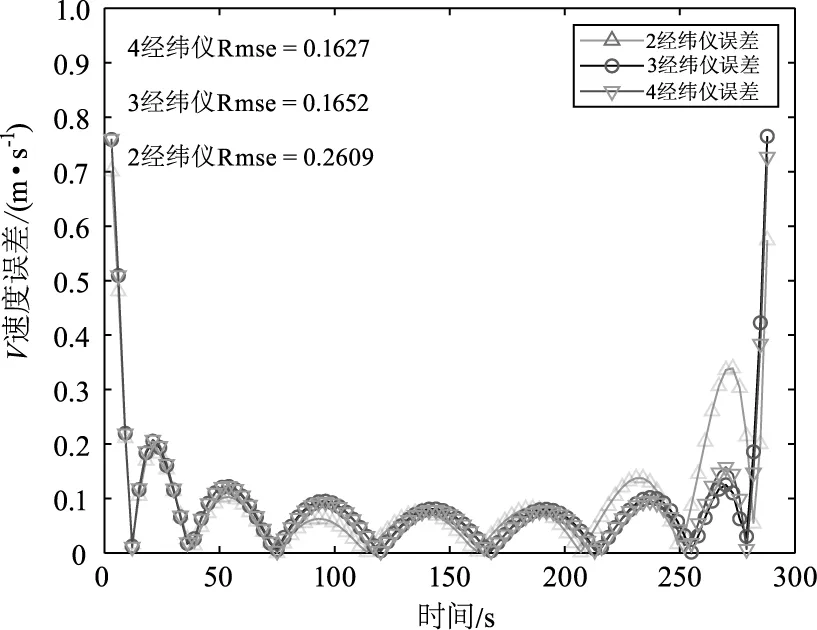
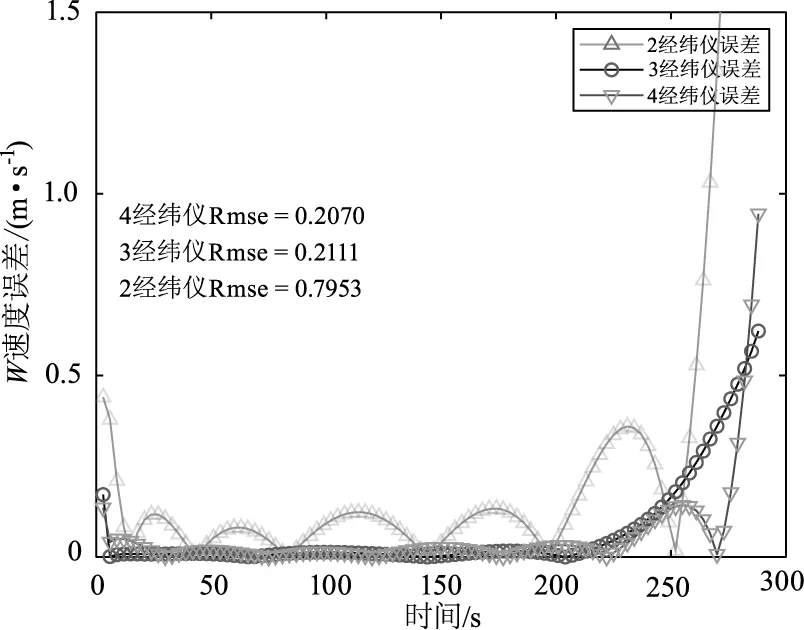
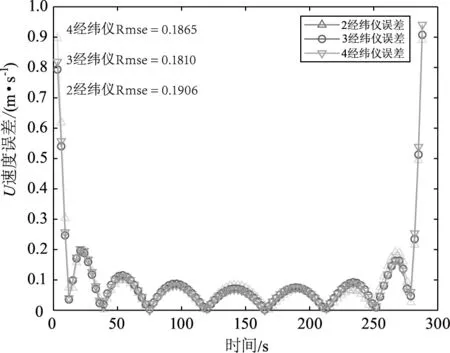
根據(jù)式(6),采用本方法進(jìn)行觀測(cè)時(shí)需要2個(gè)以上經(jīng)緯儀才能進(jìn)行觀測(cè)并求解氫氣球位置。考慮方法的適用性、操作性以及經(jīng)濟(jì)性因素,通常采用2~4個(gè)經(jīng)緯儀方法進(jìn)行觀測(cè),為進(jìn)一步驗(yàn)證本方法的魯棒性和準(zhǔn)確性,分別采用2~4個(gè)經(jīng)緯儀進(jìn)行仿真實(shí)驗(yàn),分別單獨(dú)引入0.5°的高度角、方位角以及聯(lián)合觀測(cè)隨機(jī)誤差進(jìn)行比對(duì)分析,以獲得最佳經(jīng)緯儀數(shù)量配置。圖4給出了在不同觀測(cè)誤差下,仿真的速度誤差比較結(jié)果。可以看出,無(wú)論是引入哪種誤差,增加經(jīng)緯儀的數(shù)量反演的速度誤差將會(huì)減小,準(zhǔn)確度增高。圖4(d)、(e)、(f)中可以看出,在只有高度角誤差時(shí),增加經(jīng)緯儀的數(shù)量有利于抑制高度角方向上引入的觀測(cè)誤差,但在經(jīng)緯儀數(shù)量大于3個(gè)后,速度精度基本保持不變;而圖4(g)、(h)、(i)中,只引入了方位角誤差時(shí),增加經(jīng)緯儀的數(shù)量,反演得到的速度精度基本保持一致。由此可以看出,增加經(jīng)緯儀的數(shù)量對(duì)于觀測(cè)產(chǎn)生的高度角方向上的誤差具有較強(qiáng)的抑制作用,能夠有效地消除該方向上的速度波動(dòng),但其對(duì)方位角上的精度提高作用不明顯。經(jīng)緯儀的數(shù)量也不是越多越好,在達(dá)到3個(gè)經(jīng)緯儀以后,無(wú)論是水平方向上還是垂直方向上的反演精度基本保持不變,因此通常情況下采用3個(gè)經(jīng)緯儀方法即可滿足日常觀測(cè)使用。隨后,將以3個(gè)經(jīng)緯儀觀測(cè)方式進(jìn)行相應(yīng)的觀測(cè)軌跡誤差和速度誤差進(jìn)行分析。

(a)

(b)
(c)

(d)
(e)
(f)
(g)

(h)
(i)圖4 MTLM方法(2/3/4)觀測(cè)誤差比較,(其中(a)(b)(c) 為存在方位角和高度角觀測(cè)誤差,(d)(e)(f) 為高度角觀測(cè)誤差,(g)(h)(i)為方位角觀測(cè)誤差)Fig.4 Error Comparison of MTPM methods(2/3/4), (where(a)(b)(c)is the error of azimuth and altitude angle, (d)(e)(f)is error of altitude angle,and(g)(h)(i) is the error of azimuth angle)
4.2.1 軌跡誤差分析
采用MTLM方法對(duì)氫氣球進(jìn)行觀測(cè)時(shí),在觀測(cè)方位角和高度角上各加上滿足 正態(tài)分布的高斯隨機(jī)誤差。在獲取3組觀測(cè)數(shù)據(jù)后,通過(guò)式(6)使用最小二乘法快速計(jì)算出氫氣球的位置。
如圖5所示,其中“觀測(cè)軌跡”表示加入觀測(cè)誤差后仿真形成的氫氣球軌跡,“濾波軌跡”表示采用MTLM方法濾波后獲得的氫氣球軌跡。根據(jù)仿真結(jié)果可以看出,采用本方法進(jìn)行觀測(cè)時(shí),在復(fù)雜風(fēng)場(chǎng)背景條件下(存在湍流、風(fēng)切變),定位結(jié)果具有較高準(zhǔn)確性,各方向均方根誤差小于2 m,相對(duì)于觀測(cè)軌跡,各方向精度均提高超過(guò)50 %,驗(yàn)證本方法對(duì)氫氣球軌跡反演具有較高性能。

(a)

(b)

(c)圖5 MTLM方法與仿真結(jié)果比較Fig.5 Comparison between MTLM method and simulation results
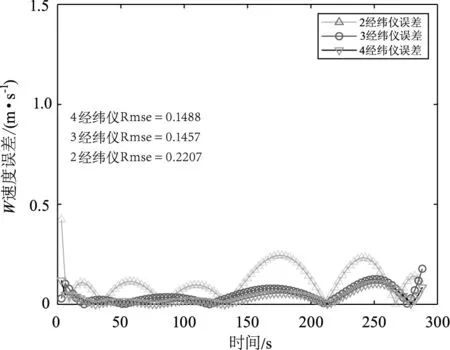
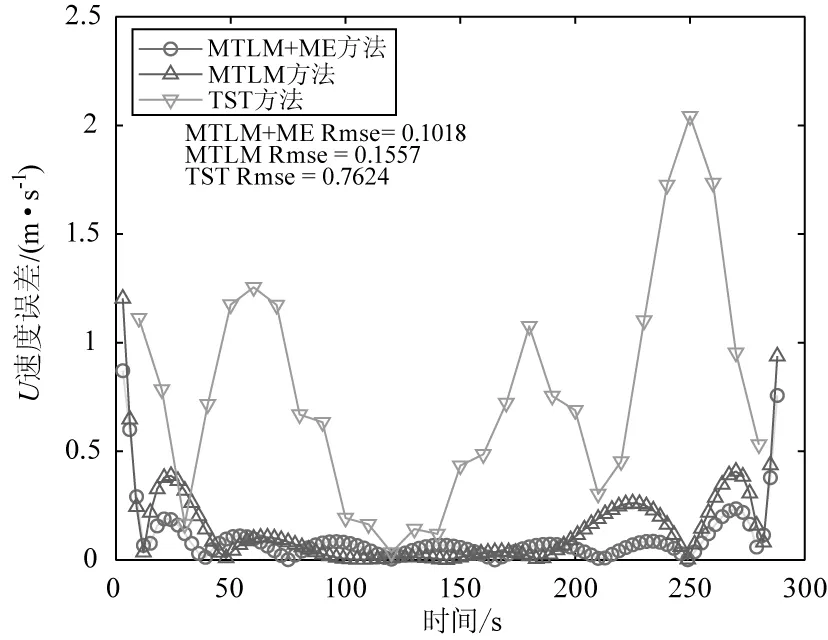
4.2.2 速度誤差分析
將MTLM方法觀測(cè)反演所獲得的位置點(diǎn)進(jìn)行多項(xiàng)式擬合,以獲得其空中軌跡的多項(xiàng)式表達(dá)形式,再根據(jù)式(13)氫氣球運(yùn)動(dòng)方程分析可分別獲得氫氣球速度以及背景風(fēng)場(chǎng)速度。將傳統(tǒng)單經(jīng)緯儀方法((ST),經(jīng)緯儀觀測(cè)加多項(xiàng)式擬合方法((TLM),及經(jīng)MTLM方法并經(jīng)過(guò)運(yùn)動(dòng)方程分析(ME)進(jìn)行對(duì)比,具體誤差分析如圖6所示,其中,圖6(a)、(b)、(c)分別為U,V,W風(fēng)速分量誤差結(jié)果。由結(jié)果可知,通過(guò)本方法反演的背景風(fēng)場(chǎng)與傳統(tǒng)單經(jīng)緯儀相比,水平速度和垂直速度準(zhǔn)確度分別提升超過(guò)80 %和90 %。此外,經(jīng)過(guò)運(yùn)動(dòng)方程分析后,本方法能夠有效修正氫氣球慣性作用所帶來(lái)的的偏離背景風(fēng)場(chǎng)的誤差,特別是在垂直方向上,能夠更加精準(zhǔn)反演出背景風(fēng)垂直速度分布情況。由于水平方向上,氫氣球所受合力僅與曳力大小有關(guān),而曳力大小與相對(duì)速度成正比,因此在氫氣球與背景風(fēng)場(chǎng)相對(duì)速度較小的情況下,曳力較小,產(chǎn)生的加速度不大,最終氫氣球與背景風(fēng)場(chǎng)速度幾乎一致,由圖6(a)、(b)可知經(jīng)反演背景風(fēng)與氫氣球速度相差較小。垂直方向上由于受浮力、重力和曳力的共同作用,其運(yùn)動(dòng)狀態(tài)變化較大,加速度的存在對(duì)氫氣球運(yùn)動(dòng)狀態(tài)影響較大,因此應(yīng)通過(guò)本方法反演的背景風(fēng)場(chǎng)代表真實(shí)背景風(fēng)場(chǎng)數(shù)據(jù),圖5(c))反演背景風(fēng)精度要遠(yuǎn)遠(yuǎn)高于氫氣球所代表的風(fēng)場(chǎng)速度。因此,仿真實(shí)驗(yàn)有效驗(yàn)證了本方法在反演背景風(fēng)場(chǎng)方面的良好性能。此外我們注意到,從圖5和圖6的速度誤差分析中,出現(xiàn)了誤差周期性的跳動(dòng)以及兩端的大誤差現(xiàn)象,該現(xiàn)象均是由采用的擬合方法所致。本文采用最小二乘法進(jìn)行擬合,通過(guò)最小化總體數(shù)據(jù)誤差的平方和以尋找數(shù)據(jù)的最佳匹配函數(shù),導(dǎo)致擬合結(jié)果與真值會(huì)出現(xiàn)“上下波動(dòng)”現(xiàn)象,這與采用最小二乘法擬合特點(diǎn)吻合。
(a)

(b)

(c)圖6 MTLM方法反演氫氣球和背景風(fēng)場(chǎng)誤差對(duì)比Fig.6 Error comparison of hydrogen balloon and background wind field by MTLM method
5 外場(chǎng)實(shí)驗(yàn)驗(yàn)證
為進(jìn)一步驗(yàn)證本方法觀測(cè)氫氣球風(fēng)場(chǎng)以及反演背景風(fēng)場(chǎng)的性能,2021年6月,位于遼寧省葫蘆島市開(kāi)展了外場(chǎng)多經(jīng)緯儀聯(lián)合觀測(cè)氫氣球?qū)嶒?yàn)。本次實(shí)驗(yàn)采用3部相同的光學(xué)經(jīng)緯儀進(jìn)行觀測(cè),經(jīng)緯儀布置方式如圖2所示,其中2號(hào)、3號(hào)經(jīng)緯儀距1號(hào)經(jīng)緯儀距離均為100 m,相對(duì)方位角分別為1.7°和62.7°,經(jīng)緯儀距地面高度均為1.61 m。因此三個(gè)經(jīng)緯儀坐標(biāo)分別為(0,0,1.61),(2.97,99.96,1.61),(88.86,45.87,1.61)。為驗(yàn)證本方法反演背景風(fēng)場(chǎng)的準(zhǔn)確性,引入激光雷達(dá)測(cè)量風(fēng)場(chǎng)數(shù)據(jù)進(jìn)行對(duì)比。激光雷達(dá)與經(jīng)緯儀觀測(cè)場(chǎng)距離為50 m,氫氣球漂移最大可觀測(cè)徑向距離距1號(hào)經(jīng)緯儀約為800 m,激光雷達(dá)最大作用距離為2000 m,其作用距離在可覆蓋氫氣球觀察全過(guò)程。
5.1 氫氣球速度獲取
觀測(cè)使用的氫氣球及附屬物重13 g,直徑為36 cm,氣溫28.6 ℃,氣壓為992.6 hPa,空氣密度1.1465 kg/m3,面風(fēng)速為2.0 m/s,風(fēng)向270°。采取每30 s同時(shí)觀測(cè)獲取1組數(shù)據(jù),在經(jīng)緯儀可見(jiàn)范圍內(nèi)共獲得20組數(shù)據(jù),如表1所示。使用MTLM方法對(duì)氫氣球空中軌跡進(jìn)行定位反演,并經(jīng)過(guò)3階多項(xiàng)式擬合以獲得氫氣球空中軌跡表達(dá)式,如圖7所示。根據(jù)多項(xiàng)式擬合獲得的曲線,并對(duì)獲得的曲線通過(guò)式(7)計(jì)算,以獲得各點(diǎn)的速度以及加速度信息。無(wú)論是采用單經(jīng)緯儀還是MTLM方法測(cè)量反演所得的風(fēng)場(chǎng)信息,理論上均為氫氣球在背景風(fēng)場(chǎng)作用下的速度,由于氫氣球慣性和曳力的存在,該速度不能代表真實(shí)的背景風(fēng)場(chǎng)速度,因此應(yīng)當(dāng)采用3.2小節(jié)方法進(jìn)行反演計(jì)算。

(a)X方向位移
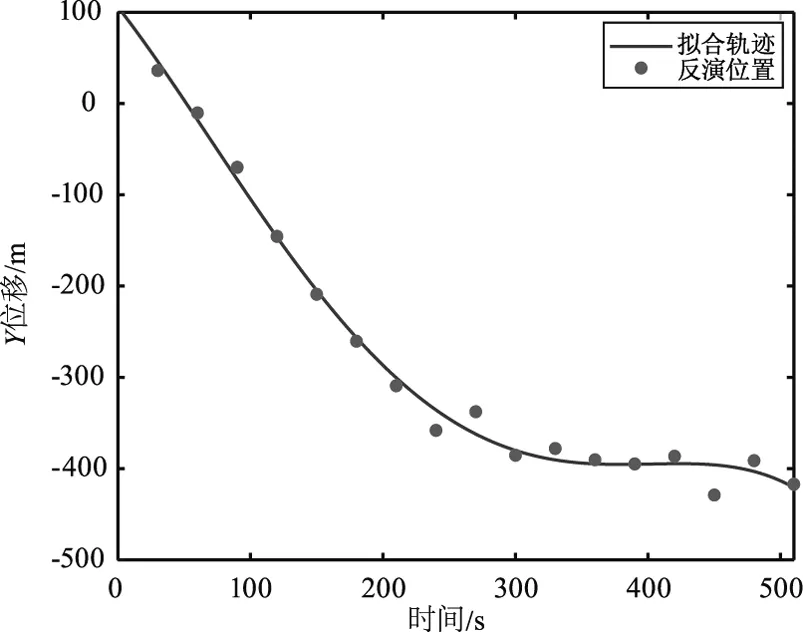
(b)Y方向位移
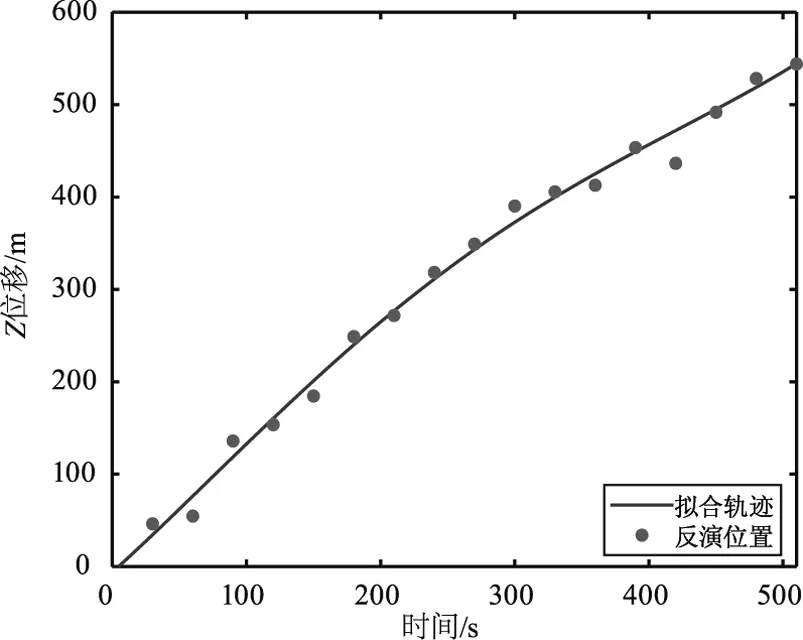
(c)Z方向位移圖7 MTLM反演實(shí)測(cè)數(shù)據(jù)位移結(jié)果Fig.7 MTLM retrieve results of displacement data
5.2 背景風(fēng)場(chǎng)獲取
通過(guò)4.1小節(jié)獲得氫氣球各方向的速度信息后,通過(guò)代入式(13)求解得到真實(shí)背景風(fēng)場(chǎng)信息,通過(guò)與在同一時(shí)間段、同一場(chǎng)地進(jìn)行風(fēng)場(chǎng)探測(cè)的激光雷達(dá)的風(fēng)場(chǎng)信息作對(duì)比,相關(guān)結(jié)果如圖7、圖8所示。由圖8(a)、(b)可以看出,對(duì)于水平風(fēng)速反演來(lái)說(shuō),采用MTLM方法較單經(jīng)緯儀性能有較大的提升,風(fēng)向和風(fēng)速準(zhǔn)確度分別提升86 %和66 %,在高精度風(fēng)速獲取上MTLM方法具有更好的性能。在精度要求不高的條件下,無(wú)論是MTLM方法還是單經(jīng)緯儀方法,都能較準(zhǔn)確地得到背景風(fēng)場(chǎng)信息,兩種方法均可以實(shí)現(xiàn)對(duì)于水平風(fēng)的快速測(cè)量。
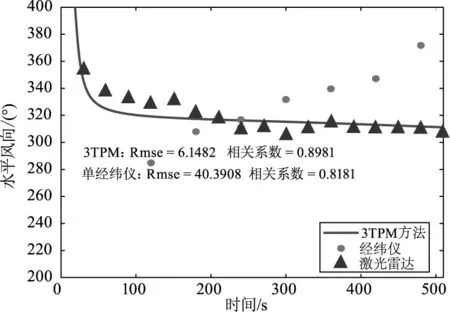
(a)水平風(fēng)向
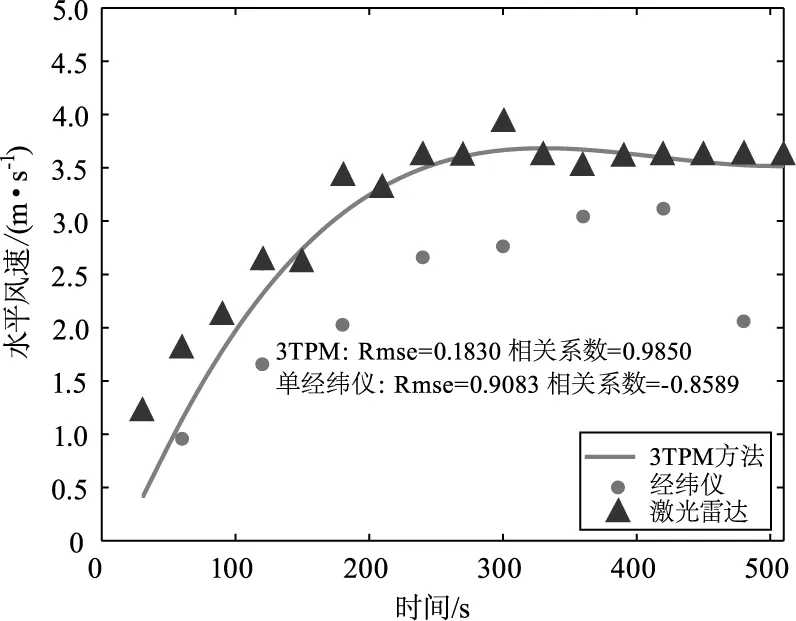
(b)風(fēng)速
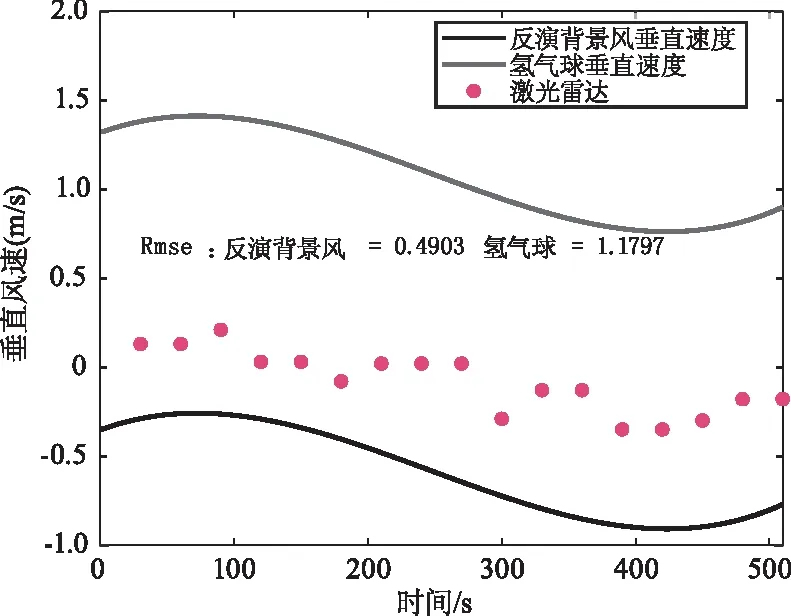
(c)垂直風(fēng)速圖8 MTLM反演實(shí)測(cè)數(shù)據(jù)風(fēng)速結(jié)果Fig.8 MTLM retrieve results of wind speed data
垂直風(fēng)速的獲取結(jié)果可由圖8(c)表示,MTLM方法不僅可以反演出氫氣球垂直速度,也能通過(guò)動(dòng)力學(xué)方程反演得出背景真實(shí)垂直風(fēng)速。由圖可知,若仍以氫氣球速度代表垂直風(fēng)速,其誤差較大幅度增加,通過(guò)本方法的到的垂直風(fēng)速能夠較準(zhǔn)確地表征真實(shí)背景風(fēng)速信息。
6 結(jié) 論
本文提出一種基于多經(jīng)緯儀的風(fēng)場(chǎng)探測(cè)與反演方法,通過(guò)對(duì)多經(jīng)緯儀協(xié)同探測(cè)獲取的氫氣球高度角和方位角信息,進(jìn)行相應(yīng)的坐標(biāo)變換與最小二乘法算法,實(shí)現(xiàn)了對(duì)于氫氣球的精確軌跡信息的獲取。在此基礎(chǔ)上,基于曳力公式對(duì)氫氣球進(jìn)行動(dòng)力學(xué)分析,實(shí)現(xiàn)了由氫氣球速度對(duì)于背景風(fēng)場(chǎng)速度的反演。與傳統(tǒng)單經(jīng)緯儀方法相比,仿真實(shí)驗(yàn)驗(yàn)證本方法反演的背景風(fēng)場(chǎng)在水平速度和垂直速度準(zhǔn)確度提升超過(guò)80 %和90 %;通過(guò)外場(chǎng)實(shí)驗(yàn)驗(yàn)證本方法反演的水平風(fēng)向和風(fēng)速準(zhǔn)確度分別提升86 %和66 %;此外,本方法還能夠有效測(cè)量垂直風(fēng)速。經(jīng)過(guò)仿真與外場(chǎng)實(shí)測(cè)實(shí)驗(yàn),驗(yàn)證了本方法對(duì)于反演背景風(fēng)場(chǎng)具有較好的性能。為實(shí)現(xiàn)經(jīng)緯儀快速、準(zhǔn)確、便捷地對(duì)高空風(fēng)場(chǎng)精確測(cè)量提供了有效手段。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢(shì)展望(2016年1期)2016-05-04 03:45:20
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56