熱障涂層加熱系統(tǒng)的自適應(yīng)模糊預(yù)測(cè)控制
2022-08-05 02:16:18楊康佃松宜郭斌趙濤
科學(xué)技術(shù)與工程 2022年19期
楊康, 佃松宜, 郭斌, 趙濤
(四川大學(xué)電氣工程學(xué)院, 成都 610065)
熱障涂層是一種航空發(fā)動(dòng)機(jī)高溫防護(hù)涂層,通過在高溫合金材料表面噴涂高溫防護(hù)涂層來提升航空發(fā)動(dòng)機(jī)的耐高溫能力。為了檢測(cè)試樣涂層的耐高溫性能,需要搭建熱障涂層試驗(yàn)裝置來達(dá)到涂層模擬試驗(yàn)所需溫度條件,并且溫度誤差一般要求為設(shè)定溫度的1%~2%,目前主要是通過調(diào)整模擬試驗(yàn)裝置的工藝參數(shù)來控制熱障涂層的溫度,文獻(xiàn)[1]在研制熱障涂層服役環(huán)境模擬裝置的基礎(chǔ)上提出通過調(diào)節(jié)冷卻氣體管道流量的方式對(duì)熱障涂層溫度進(jìn)行控制,但是這種方式對(duì)涂層溫度的調(diào)節(jié)能力有限,調(diào)節(jié)范圍一般為30~50 ℃,適用于溫度的微調(diào)。文獻(xiàn)[2]通過改變氧氣流量和煤油流量的比例,用改變焰流強(qiáng)度的方式來對(duì)涂層溫度進(jìn)行控制,在實(shí)際操作中發(fā)現(xiàn),這種方式只適合用于設(shè)定溫度不變的情況,當(dāng)設(shè)定溫度發(fā)生改變時(shí)。比如,從900 ℃降到600 ℃,就需要通過大量的實(shí)驗(yàn)來重新確定氧氣和煤油流量的比例,效率比較低。文獻(xiàn)[3]提出通過改變等離子噴槍的點(diǎn)弧功率來實(shí)現(xiàn)對(duì)溫度的控制,但是頻繁調(diào)整點(diǎn)弧功率對(duì)電控柜損耗較大,并且點(diǎn)弧功率本身也有較大波動(dòng),不適合作為控制量。文獻(xiàn)[4]分析了涂層成形過程中不同工藝參數(shù)對(duì)涂層溫度的影響,發(fā)現(xiàn)其中試樣到噴槍的距離對(duì)涂層溫度的影響最大,再加上距離的調(diào)節(jié)非常方便,因此適用于大范圍的溫度調(diào)節(jié)并且可以增加裝置的復(fù)用性,在實(shí)際操作中也有很好的效果。而試樣涂層的加熱過程本質(zhì)上是一個(gè)時(shí)變、大慣性、滯后、多擾動(dòng)的高度非線性系統(tǒng),由于難以獲得精確的數(shù)學(xué)模型,導(dǎo)致傳統(tǒng)的控制方法無法滿足對(duì)試樣涂層的溫度控制需求。
T-S(Takagi-Sugeno)模糊模型通過IF-THEN規(guī)則和隸屬度函數(shù)來實(shí)現(xiàn)以任意精度對(duì)非線性系統(tǒng)進(jìn)行逼近,可以用較少的模糊規(guī)則來擬合復(fù)雜的非線性過程,為非線性系統(tǒng)的控制開辟了新的研究方向[5]。由于T-S模糊模型在非線性系統(tǒng)建模和控制方面的優(yōu)勢(shì),非線性系統(tǒng)的T-S模糊建模成了研究熱點(diǎn),文獻(xiàn)[6]針對(duì)非線性系統(tǒng)建模問題,以扇區(qū)非線性化為基礎(chǔ)提出了一種T-S模糊建模方法,結(jié)果表明該模型能有效實(shí)現(xiàn)對(duì)原系統(tǒng)的逼近。文獻(xiàn)[7]提出用T-S模糊模型來擬合高度非線性的CSTR(continuous stirred tank reactor)系統(tǒng)并且取得了很好的控制效果。在模型參數(shù)辨識(shí)過程中,常用模糊C均值聚類(fuzzyCmeans,FCM)算法來對(duì)T-S模糊模型的輸入變量進(jìn)行模糊聚類[8],但是FCM算法對(duì)于初始值極其敏感,容易陷入局部最優(yōu),最終會(huì)導(dǎo)致模型精度較低。綜上,現(xiàn)采用距離來作為溫度控制的主控制量,采用自適應(yīng)遺傳粒子群優(yōu)化(genetic algorithm-adaptive particle swarm optimization, GA-APSO)算法來增強(qiáng)FCM算法的目標(biāo)函數(shù)全局尋優(yōu)能力,最終得到更加合理的前進(jìn)模糊聚類中心。后件參數(shù)則采用帶遺忘因子的遞推最小二乘法進(jìn)行在線估計(jì),從仿真結(jié)果來看,GA-APSO算法有效降低了FCM目標(biāo)函數(shù)的初始適應(yīng)度值和收斂適應(yīng)度值。GA-APSO-FCM算法辨識(shí)得到的模型均方誤差小于FCM算法和PSO-FCM算法,結(jié)合此模型來設(shè)計(jì)模糊預(yù)測(cè)模型控制器對(duì)系統(tǒng)進(jìn)行仿真,相比傳統(tǒng)的PID控制,該方法的超調(diào)更小,抑制干擾的能力更強(qiáng),穩(wěn)態(tài)下的控溫精度更高,仿真結(jié)果表明了該方法的有效性。
1 等離子噴槍熱源模型
為了達(dá)到高溫模擬試驗(yàn)所需的溫度條件,利用等離子噴槍對(duì)涂層進(jìn)行加熱,熱障涂層加熱系統(tǒng)結(jié)構(gòu)圖如圖1所示。

圖1 熱障涂層加熱系統(tǒng)結(jié)構(gòu)示意圖Fig.1 Schematic diagram of thermal barrier coating heating system structure
假設(shè)涂層的初始溫度與室溫相同,均為25 ℃,由于等離子射流的分布特性,可將等離子噴槍熱源近似為高斯熱源,高斯熱源的函數(shù)表達(dá)式[9]為

(1)
式(1)中:ρ為等離子射流的熱流密度;L為空間任意一點(diǎn)到高溫光斑圓心的距離;Lm為等離子射流的最大加熱半徑;ρm為等離子射流中心的最大熱流密度,其表達(dá)式[9]為
(2)
P=βIU
(3)
式中:P為等離子噴槍功率,實(shí)驗(yàn)過程中一般設(shè)為40 kW;I為點(diǎn)弧電流;U為點(diǎn)弧電壓;β為涂層的熱能吸收率。
在等離子高溫射流直接作用的涂層表面,考慮到噴槍熱源的直接加熱,該區(qū)域的傳熱方程[10]為

(4)
式(4)中:T為涂層表面的溫度;γ為熱傳遞系數(shù);cx、cy、cz分別為x、y、z3個(gè)方向與法線夾角的余弦。
在等離子高溫射流非直接作用的涂層表面,考慮到涂層與外界環(huán)境的換熱,該區(qū)域的傳熱方程[10]為

(5)
式(5)中:δ為換熱系數(shù);Th為涂層表面周圍環(huán)境溫度;Tj為涂層表面的邊界溫度。
在等離子噴槍的加熱過程中,熱障涂層的熱物性參數(shù)會(huì)隨著溫度的變化而發(fā)生改變,以8YSZ涂層為例,熱物性參數(shù)如表1所示。

表1 8YSZ的熱物性參數(shù)
由于熱源模型的復(fù)雜性和參數(shù)不確定性,利用熱源模型對(duì)高度非線性的熱障涂層加熱系統(tǒng)進(jìn)行溫度控制是十分困難的。而T-S模糊模型具有建模原理簡(jiǎn)單、數(shù)學(xué)描述方便等特點(diǎn),因此經(jīng)常用來描述復(fù)雜的非線性系統(tǒng)。
2 T-S模糊模型參數(shù)辨識(shí)方法
2.1 T-S模糊模型
Takagi和Sugeno提出了T-S模糊模型[11],通過采用多條線性的IF-THEN規(guī)則來近似復(fù)雜的非線性系統(tǒng),一個(gè)非線性系統(tǒng)可以用模糊規(guī)則來進(jìn)行表述[12]為

(6)

(7)


(8)
式(8)中:v和σ分別用來確定模糊隸屬度函數(shù)的對(duì)稱中心和寬度。
T-S模糊模型的系統(tǒng)總輸出Y為

(9)

(10)
式中:μi為第i條模糊規(guī)則的權(quán)重系數(shù);∏表示模糊化算子,通常為取小運(yùn)算或者乘積運(yùn)算。
2.2 模糊C均值聚類算法
模糊C均值聚類(FCM)算法是一種基于優(yōu)化目標(biāo)函數(shù)的聚類算法,它的思想就是讓被劃分到同一簇的數(shù)據(jù)樣本之間相似度最大,不同簇之間的相似度最小[13],而聚類的最終目的就是為了求取目標(biāo)函數(shù)的最小值,目標(biāo)函數(shù)J(U,V)表達(dá)式為

(11)

(12)
式中:dik表示數(shù)據(jù)樣本xk(k=1,2,…,n)到第i個(gè)聚類中心vi(i=1,2,…,c)的歐氏距離;uik表示第k個(gè)數(shù)據(jù)樣本xk屬于第i類的隸屬度;J為目標(biāo)函數(shù)值;U和V分別為隸屬度值uik和聚類中心vi組成的矩陣;m為模糊權(quán)重指數(shù)。結(jié)合拉格朗日乘數(shù)法對(duì)式(11)進(jìn)行求導(dǎo)可以得到隸屬度uik和聚類中心vi的迭代公式為

(13)
(14)
FCM算法對(duì)于初始值的選取極為敏感且容易陷入局部最優(yōu),為此,可以利用優(yōu)化算法來增強(qiáng)FCM算法的全局尋優(yōu)能力,從而達(dá)到更好的聚類效果。
2.3 改進(jìn)的粒子群優(yōu)化FCM算法
粒子群優(yōu)化(PSO)算法通過模擬鳥群(魚群)覓食行為來尋求函數(shù)最優(yōu)解[14],將鳥群作為一個(gè)粒子群,鳥群中的個(gè)體作為空間中的一個(gè)粒子,每個(gè)粒子代表空間中的一個(gè)可行解,適應(yīng)度函數(shù)作為評(píng)判標(biāo)準(zhǔn)來評(píng)價(jià)粒子的好壞。
在一個(gè)d維空間中第i個(gè)粒子的位置信息xi和速度信息vi為

(15)
粒子的第λ次迭代過程中,第i個(gè)粒子的d維速度更新公式和位置更新公式為
(16)
標(biāo)準(zhǔn)粒子群優(yōu)化算法一般采用固定常數(shù)或者線性變化的慣性權(quán)重,當(dāng)尋優(yōu)一些維度較高的復(fù)雜非線性函數(shù)時(shí),粒子容易出現(xiàn)“收斂早熟”現(xiàn)象從而導(dǎo)致適應(yīng)度函數(shù)陷入局部最優(yōu),對(duì)此,采用一種非線性自適應(yīng)慣性權(quán)重調(diào)整策略[15],在粒子群迭代的初期保持一個(gè)較大的慣性權(quán)重,有利于粒子跳出局部最優(yōu),增強(qiáng)粒子的全局搜索能力,在迭代后期保持一個(gè)較小的慣性權(quán)重,增強(qiáng)粒子局部搜索強(qiáng)度,同時(shí)降低適應(yīng)度值較優(yōu)粒子的慣性權(quán)重,從而保留該粒子,增加適應(yīng)度值較差粒子的慣性權(quán)重,使其能搜索到更好的區(qū)域,非線性調(diào)整策略表達(dá)式為
(17)

粒子群優(yōu)化算法是通過粒子間的互相協(xié)作來尋找最優(yōu)解的,當(dāng)粒子群初始化不合理時(shí)經(jīng)常會(huì)出現(xiàn)由于粒子多樣性的缺失而導(dǎo)致的無法找到全局最優(yōu)解的情況,對(duì)此,采用遺傳算法來對(duì)自適應(yīng)粒子群(APSO)算法進(jìn)行優(yōu)化,以APSO算法更新得到的粒子位置和速度信息為基礎(chǔ),引入遺傳算法對(duì)編碼后的粒子進(jìn)行復(fù)制、交叉、變異操作,生成下一代粒子種群[16]。自適應(yīng)遺傳粒子群(GA-APSO)算法兼具遺傳算法的全局搜索優(yōu)勢(shì)和自適應(yīng)粒子群(APSO)算法的局部搜索能力[17],算法的實(shí)現(xiàn)流程如圖2所示。
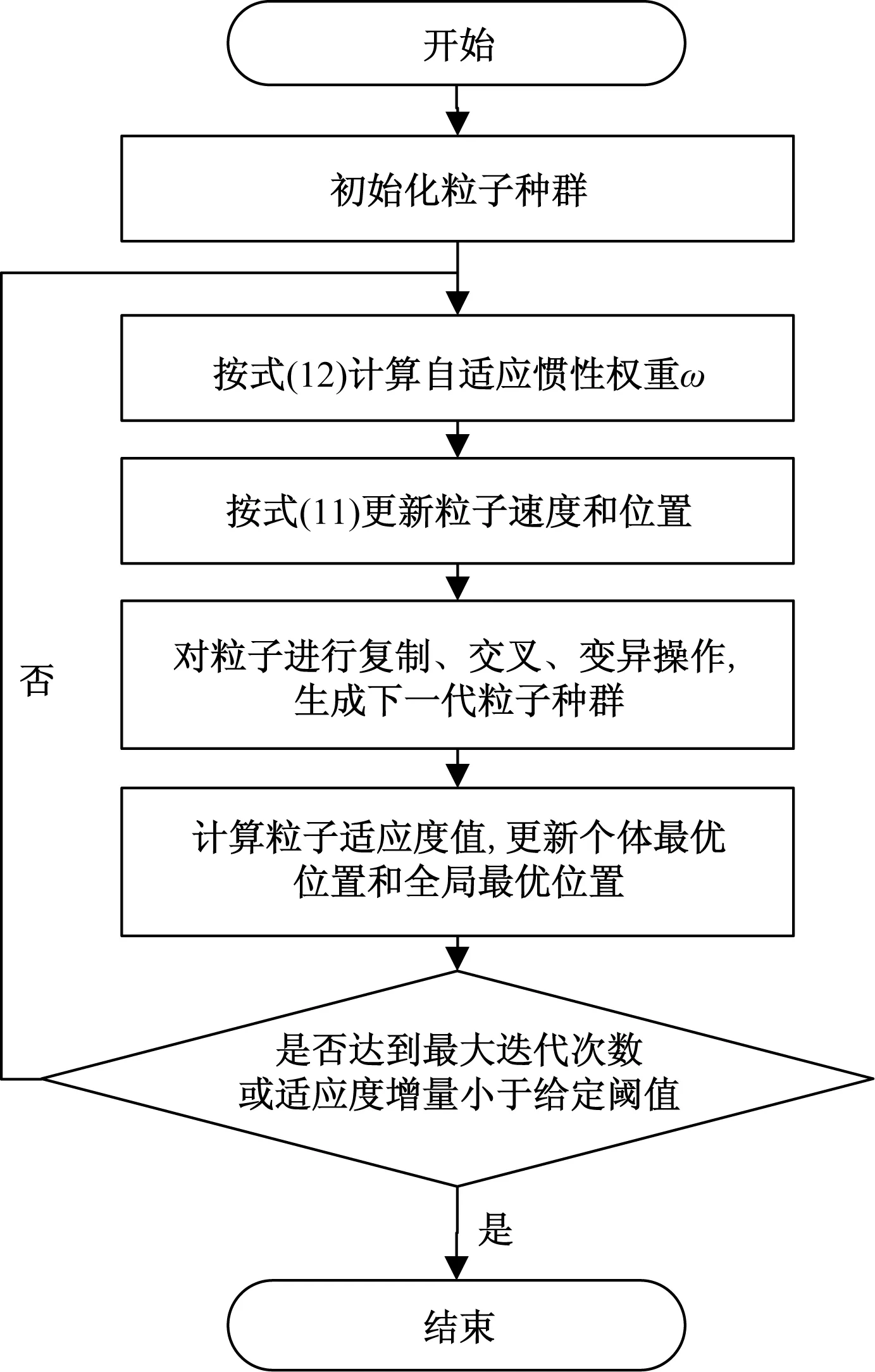
圖2 GA-APSO算法流程圖Fig.2 GA-APSO algorithm flow chart
模糊C均值聚類(FCM)算法本身存在對(duì)初始值敏感且容易陷入局部最優(yōu)的缺點(diǎn),針對(duì)該問題,利用自適應(yīng)遺傳粒子群(GA-APSO)算法全局尋優(yōu)能力強(qiáng),收斂速度快的特點(diǎn)對(duì)FCM算法進(jìn)行優(yōu)化改進(jìn),最終可以得到目標(biāo)函數(shù)的全局最優(yōu)解。在d維聚類空間中,每個(gè)粒子代表的都是一個(gè)聚類中心可行解,對(duì)第j個(gè)粒子xj編碼方式[18]為xj=(k11,k12,…,k1d,…,ki1,ki2,…,kid,…,kc1,kc2,…,kcd),其中(ki1,ki2,…,kid)為第i類聚類中心,c為聚類個(gè)數(shù)。將式(11)中FCM算法的目標(biāo)函數(shù)作為適應(yīng)度函數(shù),即
f(xj)=J(U,V)
(18)
自適應(yīng)遺傳粒子群優(yōu)化模糊C均值聚類(GA-APSO-FCM)算法的實(shí)現(xiàn)步驟如下:
步驟1確定聚類個(gè)數(shù)c、種群規(guī)模n、自適應(yīng)權(quán)重的最大、最小值ωmax、ωmin,加速度常數(shù)k1、k2、粒子速度邊界[-Vmax,Vmax]、粒子位置邊界[Xmin,Xmax]、交叉概率Pc、變異概率Pm、迭代停止閾值τ以及最大迭代次數(shù)λmax等參數(shù)。
步驟2按照設(shè)定的參數(shù)初始化粒子的速度和位置信息。
步驟3分別用式(13)和式(14)計(jì)算隸屬度矩陣Uλ和聚類中心矩陣Vλ。
步驟4用式(16)和式(17)更新粒子的速度和位置信息。
步驟5對(duì)粒子進(jìn)行復(fù)制、交叉、變異操作,生成下一代粒子種群。


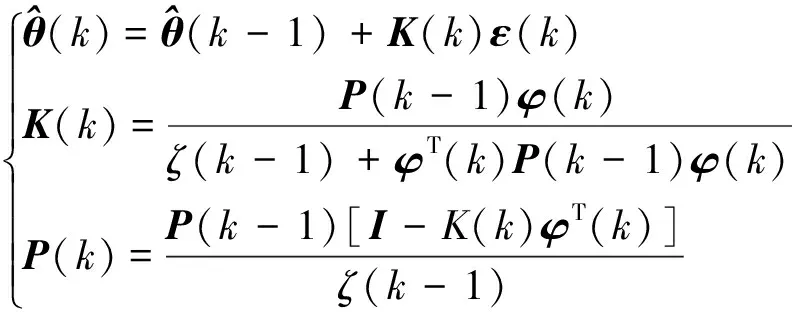
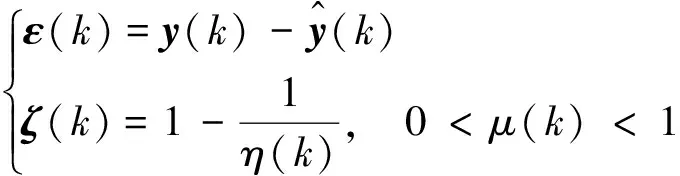
2.4 自適應(yīng)遺忘因子遞推最小二乘法
由于熱障涂層加熱系統(tǒng)本質(zhì)為一個(gè)時(shí)變系統(tǒng),在辨識(shí)過程中模型參數(shù)會(huì)隨著時(shí)間產(chǎn)生變化,傳統(tǒng)的用于時(shí)不變系統(tǒng)的辨識(shí)方法已經(jīng)無法滿足要求,因此,采用帶有自適應(yīng)遺忘因子的最小二乘法來對(duì)模糊模型的后件參數(shù)進(jìn)行辨識(shí)[19]。
系統(tǒng)輸入輸出數(shù)據(jù)為{x(k),y(k),k=1,2,…,N},準(zhǔn)則函數(shù)G(k)為

(19)
(20)
(21)

(22)

T-S模糊模型的前后件參數(shù)都已通過辨識(shí)算法得到,式(6)中的參數(shù)均為時(shí)變參數(shù),假設(shè)一個(gè)辨識(shí)周期內(nèi)模糊規(guī)則的隸屬度函數(shù)不發(fā)生變化,最終利用得到的T-S模糊模型來設(shè)計(jì)模糊廣義預(yù)測(cè)控制器。
3 自適應(yīng)模糊廣義預(yù)測(cè)控制
自適應(yīng)模糊廣義預(yù)測(cè)控制(adaptive fuzzy generalized predictive control,AFGPC)算法包括控制對(duì)象(熱障涂層)、廣義預(yù)測(cè)控制器(generalized predictive control,GPC)、模型參數(shù)調(diào)整以及T-S模糊模型的自適應(yīng)參數(shù)辨識(shí),通過采用帶有自適應(yīng)慣性權(quán)重的粒子群優(yōu)化算法和自適應(yīng)遺忘因子的遞推最小二乘法來實(shí)現(xiàn)模型參數(shù)的在線調(diào)整。AFGPC的控制結(jié)構(gòu)如圖3所示[20]。

圖3 AFGPC的控制結(jié)構(gòu)圖Fig.3 AFGPC control structure diagram
廣義預(yù)測(cè)控制算法采用CARIMA模型[21],即
A(v-1)y(k)=z-dB(v-1)u(k)+C(v-1)ξ(k)/Δ
(23)
式(23)中:y(k)和u(k)分別代表系統(tǒng)的輸出量和輸入量;z為延遲環(huán)節(jié);ξ(k)為系統(tǒng)的干擾;Δ=1-v-1為差分算子;d為被控對(duì)象純時(shí)延,一般取C(v-1)=1;CARIMA模型系數(shù)矩陣分別為
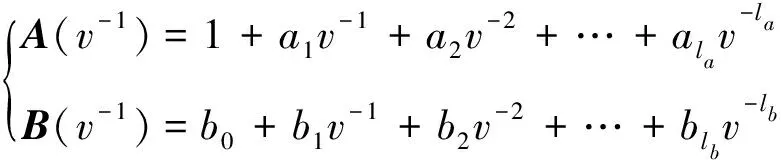
(24)
故式(23)可簡(jiǎn)化為
A(v-1)y(k)=B(v-1)u(k-d)+ξ(k)/Δ
(25)
求解最小j步最優(yōu)預(yù)測(cè)值y(k+j|k)的GPC預(yù)測(cè)模型為
y(k+j|k)=PjΔu(k+j-1)+Qjy(k)+
Ojξ(k+j)
(26)
式(26)中:Oj、Pj、Qj滿足Diophantine方程,即

(27)
取預(yù)測(cè)控制的性能指標(biāo)函數(shù)為

(28)
式(28)中:E(·)為數(shù)學(xué)期望,y(k+j)和yr(k+j)為k+j時(shí)刻的實(shí)際輸出和期望輸出;N1為最小輸出長度;N2為預(yù)測(cè)長度;Nu為控制長度;ψj為控制加權(quán)系數(shù),一般為常數(shù)。
為了后續(xù)方便計(jì)算,將式(28)中的性能指標(biāo)函數(shù)轉(zhuǎn)化為矩陣形式,即
H=E{[Y-Yr]T[Y-Yr]+ΔUTχΔU}
(29)
式(29)中:χ=diag(ψ1,ψ2,…,ψNu)。
同樣的,將式(26)中的預(yù)測(cè)模型也轉(zhuǎn)化為
Y=P1ΔU+P2ΔU(k-j)+QY(k)+Oξ
(30)
式(30)中:Y為預(yù)測(cè)輸出;ΔU為當(dāng)前和未來控制增量;ΔU(k-j)為過去的控制增量;Y(k)為實(shí)際輸出;ξ為白噪聲序列;P1、P2、Q、O為系數(shù)矩陣。
將式(30)代入式(29)中,得
H=E{[P1ΔU+Y1+Oξ-Yr]T×
[P1ΔU+Y1+Oξ-Yr]+ΔUTIΔU}
(31)

P2ΔU(k-j)-QY(k)]
(32)
最終可求得當(dāng)前k時(shí)刻的最優(yōu)控制量為
u(k)=u(k-1)+Δu(k)=u(k-1)+

(33)
4 仿真結(jié)果及分析
4.1 系統(tǒng)的模糊辨識(shí)
熱障涂層加熱系統(tǒng)主要是通過控制等離子噴槍到試樣涂層之間的距離d(t)來調(diào)節(jié)涂層的溫度T(t),因此系統(tǒng)的輸入輸出信號(hào)可表示為y(t)=T(t)以及u(t)=d(t)。在模糊前件參數(shù)的辨識(shí)過程中,分別采用PSO算法和GA-APSO算法來增強(qiáng)FCM算法的全局尋優(yōu)能力并進(jìn)行對(duì)比。后件參數(shù)則采用帶自適應(yīng)遺忘因子的最小二乘法來進(jìn)行辨識(shí)。GA-APSO算法的參數(shù)如表2所示。

表2 GA-APSO算法的參數(shù)表
圖4為FCM算法、PSO-FCM算法以及GA-APSO-FCM算法的適應(yīng)度函數(shù)變化曲線,各算法收斂后的適應(yīng)度值分別為392 027、245 190、195 070。與只使用FCM算法相比,GA-APSO-FCM算法能大幅降低適應(yīng)度函數(shù)值;與PSO-FCM算法相比,GA-APSO-FCM算法收斂速度更快,適應(yīng)度值也更小。
取模糊權(quán)重指數(shù)m=2,規(guī)則數(shù)c=6,迭代停止閾值τ=1×10-5,最大迭代次數(shù)λ=100,根據(jù)現(xiàn)場(chǎng)采集得到的500組數(shù)據(jù)輸入輸出數(shù)據(jù)進(jìn)行辨識(shí)。
圖5為FCM算法、PSO-FCM算法以及GA-APSO-FCM算法對(duì)熱障涂層加熱系統(tǒng)的辨識(shí)曲線。圖6為圖5中小矩形框的局部放大圖,從圖6中可以看出,GA-APSO-FCM算法和PSO-FCM算法的辨識(shí)效果明顯要優(yōu)于FCM算法。圖7為三種算法在辨識(shí)過程中產(chǎn)生的均方誤差曲線,從圖7可以更加直觀地看出,相比FCM和PSO-FCM算法,GA-APSO-FCM算法的辨識(shí)誤差最小,性能最好,雖然FCM算法辨識(shí)速度較快,但是由于其容易陷入局部最優(yōu)從而導(dǎo)致辨識(shí)誤差偏大。三種算法的辨識(shí)誤差從大到小分別為4.528 3、3.942 5、3.747 1。
采用GA-APSO-FCM算法來對(duì)熱障涂層加熱系統(tǒng)進(jìn)行辨識(shí),將表示距離的變量d(t)和表示試樣涂層溫度的變量T(t)、T(t-1)作為模糊模型的輸入變量,將T(t+1)作為模糊模型的輸出變量。通過

圖4 適應(yīng)度函數(shù)變化曲線Fig.4 Fitness function change curve
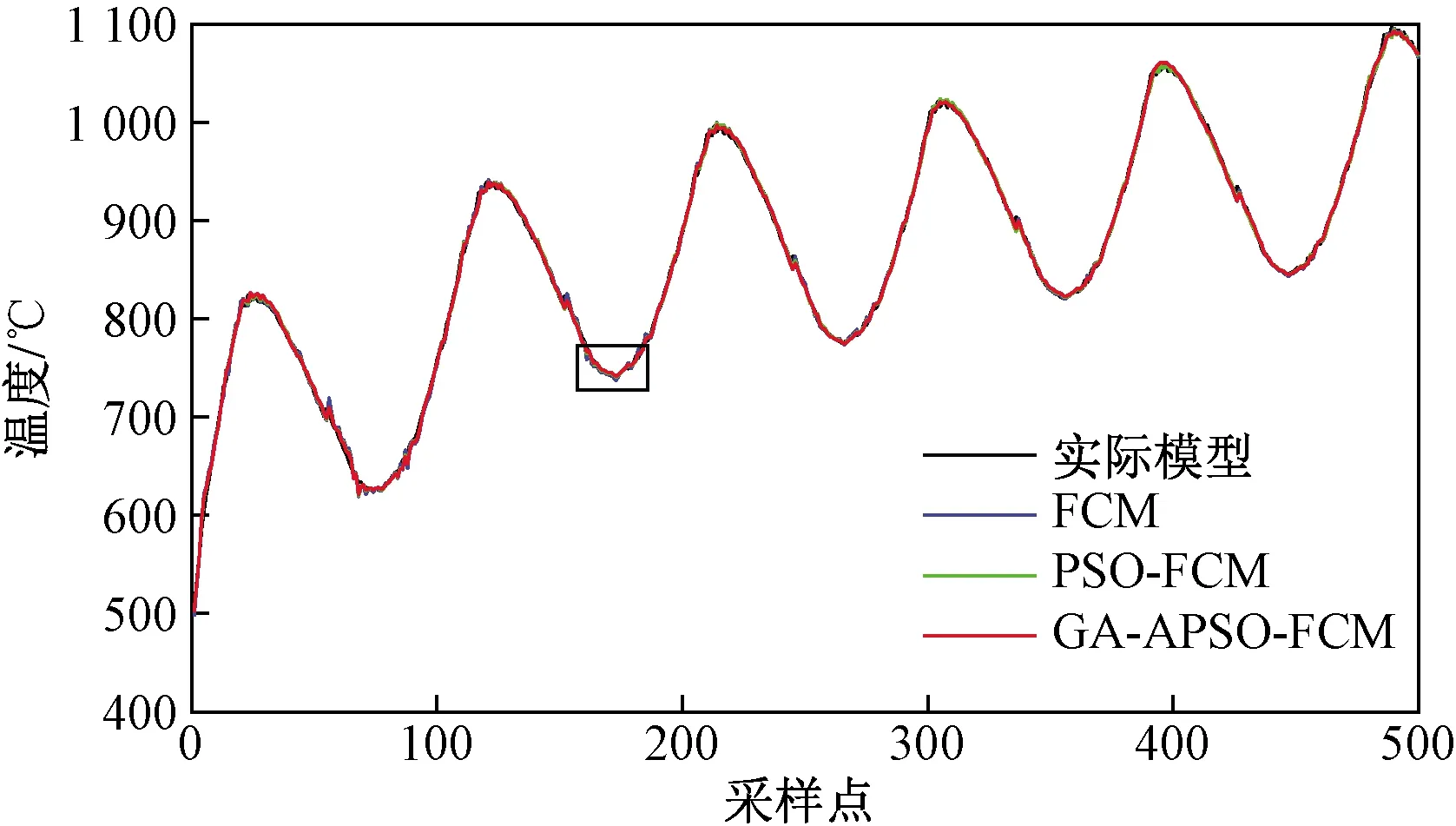
圖5 系統(tǒng)的辨識(shí)曲線Fig.5 Identification curve of the system
算法辨識(shí)可得到如圖8所示的T-S模糊模型輸入變量的隸屬度函數(shù)曲線。

圖6 辨識(shí)曲線局部放大圖Fig.6 Partial enlarged view of identification curve

圖7 均方誤差曲線Fig.7 Mean square error curve

圖8 輸入變量隸屬度函數(shù)曲線Fig.8 Input variable membership function curve


(34)
4.2 系統(tǒng)的預(yù)測(cè)控制
熱障涂層加熱系統(tǒng)的T-S模糊模型可通過局部線性化的方式轉(zhuǎn)化為廣義預(yù)測(cè)控制所需的CARIMA模型。預(yù)測(cè)控制參數(shù)為:預(yù)測(cè)步長Np=8,控制步長Nu=2,柔化系數(shù)α=0.84。另外,為了驗(yàn)證廣義預(yù)測(cè)控制算法的性能,將PID控制算法與之進(jìn)行對(duì)比,用試錯(cuò)法對(duì)PID算法進(jìn)行調(diào)整,PID算法參數(shù)最終設(shè)定為Kp=0.42、Ki=0.17、Kd=1.15。

圖9 PID與GPC的控制對(duì)比曲線(無干擾)Fig.9 PID and GPC control comparison curve (nodisturbance)
圖9為未加入擾動(dòng)時(shí)GPC與PID的對(duì)比效果曲線,可以明顯看出,GPC算法跟蹤期望輸出的調(diào)節(jié)時(shí)間更短、超調(diào)量更小,性能更加優(yōu)越。未加入擾動(dòng)情況下GPC和PID產(chǎn)生的均方根誤差RMSE和平均絕對(duì)誤差MAE如表3所示。
為了驗(yàn)證控制器的抗干擾能力,加入白噪聲干擾,圖10為加入擾動(dòng)后的控制對(duì)比曲線,可以看出,GPC算法的抗干擾能力要優(yōu)于PID算法。加入擾動(dòng)情況下GPC和PID產(chǎn)生的均方根誤差RMSE和平均絕對(duì)誤差MAE如表4所示。
從表3和表4可以看出,GPC算法的誤差都要小于PID算法,利用GPC算法能更好地實(shí)現(xiàn)對(duì)涂層溫度的控制。

圖10 PID與GPC的控制對(duì)比曲線(有干擾)Fig.10 PID and GPC control comparison curve (with disturbance)

表3 控制算法性能對(duì)比表(無干擾)

表4 控制算法性能對(duì)比表(有干擾)
5 結(jié)論
選取熱障涂層加熱系統(tǒng)作為研究對(duì)象,根據(jù)現(xiàn)場(chǎng)采集得到的輸入輸出數(shù)據(jù),分別采用FCM算法、PSO-FCM算法以及GA-APSO-FCM算法對(duì)T-S模糊模型的前件參數(shù)進(jìn)行辨識(shí)。根據(jù)辨識(shí)結(jié)果可知,GA-APSO-FCM算法的辨識(shí)精度更高,同時(shí),利用帶自適應(yīng)遺忘因子的最小二乘法對(duì)模型的后件參數(shù)進(jìn)行估計(jì),將得到的T-S模糊模型與廣義預(yù)測(cè)控制算法進(jìn)行結(jié)合并以此來設(shè)計(jì)自適應(yīng)模糊廣義預(yù)測(cè)控制器。仿真結(jié)果表明,針對(duì)具有時(shí)變特性的非線性系統(tǒng),該控制方法具有良好的控制效果;并且該方法不需要建立精確的數(shù)學(xué)模型,因此在工業(yè)領(lǐng)域中具有廣泛的應(yīng)用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
