大田對靶施藥霧滴定向沉積控制方法研究
2022-08-05 00:36:56李海龍權(quán)龍哲皮鵬飛郭英豪
農(nóng)業(yè)機械學(xué)報 2022年6期
李海龍 權(quán)龍哲,2 皮鵬飛 郭英豪 馬 震 余 濤
(1.東北農(nóng)業(yè)大學(xué)工程學(xué)院,哈爾濱 150030;2.安徽省智能農(nóng)機裝備工程實驗室,合肥 230036;3.安徽農(nóng)業(yè)大學(xué)工學(xué)院,合肥 230036)
0 引言
對靶施藥是實現(xiàn)農(nóng)藥高效利用、減少環(huán)境污染的有效技術(shù)手段,該技術(shù)可根據(jù)病灶區(qū)域的防控需求來定量施藥,實現(xiàn)農(nóng)藥高效利用,維持農(nóng)田生態(tài)可持續(xù)發(fā)展[1-4]。基于處方圖的對靶施藥技術(shù)可根據(jù)全球?qū)Ш叫l(wèi)星系統(tǒng)(Global navigation satellite system,GNSS)獲取噴頭位置信息和運動狀態(tài),進行處方圖位置匹配控制噴頭動作,進行按需對靶施藥,從而提高作業(yè)速度,降低植保裝備成本[1,5-8]。然而,基于處方圖的對靶施藥系統(tǒng)仍無法避免GNSS設(shè)備信號延遲、控制系統(tǒng)指令滯后、噴頭響應(yīng)動作延遲,從而造成霧滴沉積位置偏移的問題,使得對靶施藥精度下降[9-12]。
國內(nèi)外眾多學(xué)者為解決對靶施藥霧滴沉積偏移問題開展了大量研究,其中包括作業(yè)速度精準感知、定位信息融合、滯后時間補償、霧滴沉積糾偏、霧滴漂移控制等,但這些研究都以較低分辨率的大尺寸靶標物體作業(yè)場景為主[13-17]。為滿足面向植株個體水平的高分辨率對靶施藥的作業(yè)需求,解決因靶標尺寸過小、靶標數(shù)量過多、動作時間過短、執(zhí)行部件過多所造成的系統(tǒng)性延遲問題,尋求可行方式來準確預(yù)估對靶施藥過程中的霧滴沉積位置,是提高對靶施藥作業(yè)精度的關(guān)鍵[18-19]。
針對以上問題,本文以對靶噴施的霧滴粒群為研究對象,構(gòu)建噴頭位姿高頻感知系統(tǒng),建立植保裝備作業(yè)過程中的霧滴沉積覆蓋區(qū)域預(yù)估模型,制定噴頭控制規(guī)則,旨在避免因系統(tǒng)性延遲造成的霧滴沉積位置偏移問題,以期為發(fā)展高分辨率精準施藥提供參考。
1 對靶施藥作業(yè)分析
1.1 對靶施藥平臺結(jié)構(gòu)
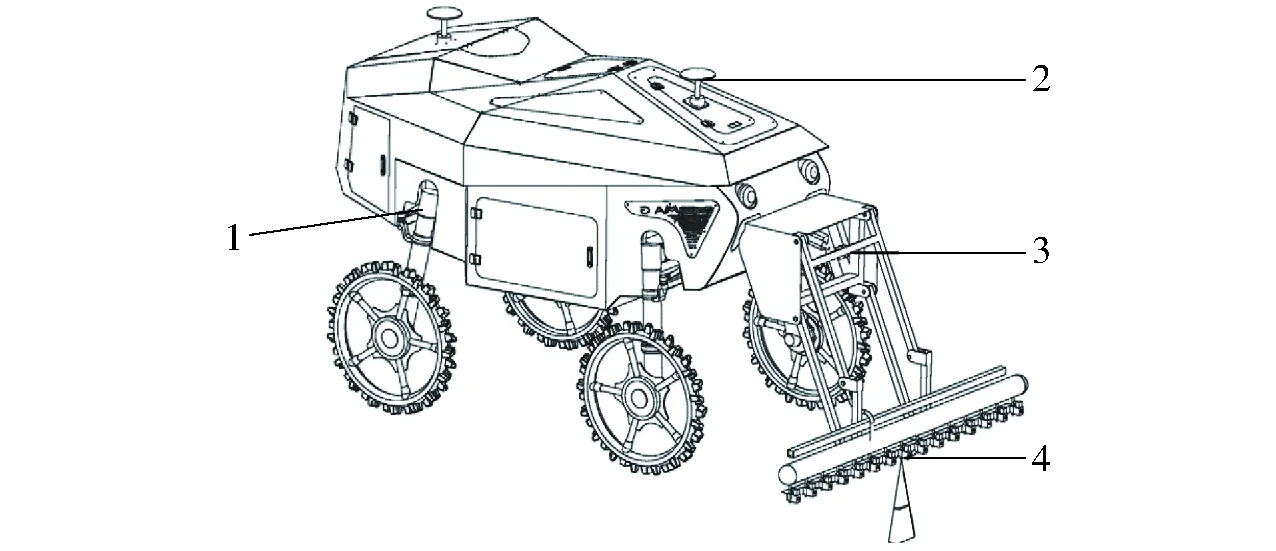
圖1 對靶施藥機器人Fig.1 Targeted spraying robot1.行走底盤 2.GNSS 3.對靶施藥控制系統(tǒng) 4.電磁噴頭
基于處方圖的對靶施藥機器人結(jié)構(gòu)如圖1所示,主要由行走底盤、GNSS、對靶施藥控制系統(tǒng)和電磁噴頭構(gòu)成。
1.2 工作原理
基于處方圖的對靶施藥機器人在田間工作時,首先通過對靶施藥控制系統(tǒng)進行GNSS信號解析,然后根據(jù)噴頭與定位定向天線的空間結(jié)構(gòu)位置關(guān)系,解算出各噴頭的施藥覆蓋坐標范圍,最后將各噴頭覆蓋范圍與處方圖中的作業(yè)區(qū)域信息進行比對,以此控制噴頭動作,完成對靶噴施。
1.3 對靶施藥作業(yè)特點
與傳統(tǒng)大田施藥作業(yè)不同,面向植株個體水平的高分辨率對靶施藥作業(yè),要求控制系統(tǒng)具有極快的噴頭位置狀態(tài)信息更新頻率,從而使控制噴頭在極短時間內(nèi)響應(yīng)動作,實現(xiàn)噴頭覆蓋區(qū)域與處方圖靶標區(qū)域的匹配,完成藥液定向噴施[17,20]。植保作業(yè)存在作業(yè)裝備、土地狀況、施藥對象的差異性,對作業(yè)速度要求不一,作業(yè)速度越快,噴頭響應(yīng)動作時間越短,為使靶標區(qū)域外的藥液沉積面積更小,需要提高對系統(tǒng)的實時性要求,在保證對靶施藥準確率的前提下,對霧滴沉積偏移距離的要求也就更高。對靶施藥沉積區(qū)域的霧滴密度存在邊緣效應(yīng),需通過延長噴頭動作時間進行完整覆蓋,或使用傳導(dǎo)型藥劑來彌補邊緣效應(yīng)缺陷。對靶施藥噴頭間斷動作所形成的霧滴群體不連續(xù),抗干擾能力較弱,需采取降低噴頭作業(yè)高度、提高管路壓力等措施,以減小風(fēng)場等因素對霧滴沉積區(qū)域的影響。
1.4 霧滴沉積偏移分析
機器人搭載的GNSS(上海指尚DOVE-E482型,精度1 cm)通過接入連續(xù)運行參考站(Continuously operating reference stations,CORS)的實時差分(Real-time kinematic,RTK)數(shù)據(jù)鏈(千尋知寸FindCM,精度2 cm),實時獲取機器人準確位置。由于CORS-RTK通訊機制和硬件數(shù)據(jù)更新頻率的限制,使得機器人運動過程中GNSS信號存在誤差和延遲。對靶施藥控制系統(tǒng)對GNSS數(shù)據(jù)中的$GPGGA、$GPVTG、$GNHDT語句進行解析,并根據(jù)噴頭空間位置結(jié)構(gòu)獲取各噴頭的覆蓋范圍;抽取比對處方圖中數(shù)據(jù),控制噴頭瞬間響應(yīng)的整個過程中存在系統(tǒng)性延遲。施藥靶標對象均存在空間密度差異的現(xiàn)象,這將直接影響控制系統(tǒng)在當(dāng)前區(qū)域的運算量,導(dǎo)致系統(tǒng)性延遲不一。假定各噴頭與定位定向天線位置相對固定,沉積過程不受風(fēng)場干擾,在整個系統(tǒng)信號誤差和時間延遲的共同作用下,噴頭將在錯誤位置響應(yīng)動作,造成霧滴沉積位置偏移。
2 對靶施藥霧滴沉積預(yù)估模型
通過分析對靶施藥的工作原理和作業(yè)特點,確定了影響霧滴沉積位置偏移的主要因素為系統(tǒng)信號誤差和延遲。高效準確感知噴頭位姿信息和狀態(tài)參數(shù),為準確預(yù)估霧滴沉積覆蓋區(qū)域的前提,是控制噴頭及時響應(yīng)實現(xiàn)霧滴定向沉積的關(guān)鍵。
2.1 噴頭位姿感知
高分辨率對靶施藥作業(yè)要求控制系統(tǒng)具有極快的噴頭位姿信息更新頻率,而大部分GNSS硬件更新頻率有限,大都以5~20 Hz為主,并不能滿足高分辨率對靶施藥實時性的要求。
受到土質(zhì)、水分等因素影響,不同農(nóng)田區(qū)域土壤堅實度存在顯著差異,使得行走輪沉陷程度不一,使用接觸式傳感器難以獲得準確數(shù)據(jù),而非接觸式傳感器(如慣性測量單元(Inertial measurement unit,IMU))數(shù)據(jù)更新頻率可達200 Hz,能夠在較短時間內(nèi)通過計算連續(xù)獲得機車位置、速度、航向等行走信息。當(dāng)保持IMU坐標軸線與機車行駛方向一致時,進行GNSS數(shù)據(jù)和IMU的數(shù)據(jù)融合,根據(jù)噴頭與定位定向天線的空間結(jié)構(gòu)位置關(guān)系,便可獲取噴頭的實時運動狀態(tài)參數(shù)[21]。
2.2 噴頭位姿描述

圖2 噴頭運動關(guān)系轉(zhuǎn)換Fig.2 Nozzle motion relationship conversion
噴頭與機器人連接關(guān)系視為剛性連接,噴頭隨機器人的連續(xù)運動,可看作噴頭在水平面內(nèi)的二維遞推運動,如圖2a所示,機器人初始位置投影坐標為(E0,N0),初始航向角為θ0,噴頭與定位定向天線的結(jié)構(gòu)位置關(guān)系如圖2b所示。
為方便進行噴頭位姿描述,規(guī)定噴頭朝向角為其隨機器人前進方向的北向夾角,與機器人航向角相同[21]。IMU安裝于定位天線正下方,根據(jù)圖2所示,噴頭朝向角計算式為
(1)
式中ω——IMU陀螺儀所測機器人角速度,rad/s
IMU獲得噴頭加速度分量為
(2)
(3)
式中ax——IMU傳感器獲得的車體沿x方向加速度,m/s2
ay——IMU傳感器獲得的車體沿y方向加速度,m/s2
lBC——噴頭與機器人中軸線的橫向距離,m
lAB——噴頭與機器人后軸線的縱向距離,m
噴頭加速度在導(dǎo)航坐標系中的分量為
aDE=aDysinθDt+aDxcosθDt
(4)
aDN=aDycosθDt-aDxsinθDt
(5)
噴頭在導(dǎo)航坐標系中的速度分量為加速度的積分,其速度分量為
(6)
(7)
噴頭在導(dǎo)航坐標系中的位移分量可表示為對加速度的二重積分,噴頭在導(dǎo)航坐標系中的位置分量為
EDt=?(aDysinθDt+aDxcosθDt)dtdt+E0
(8)
NDt=?(aDycosθDt-aDxsinθDt)dtdt+N0
(9)
使用GNSS數(shù)據(jù)描述的噴頭位置為
EGkt=-KΔsinθ+lAB+E0
(10)
NGkt=KΔcosθ+lABsinθ+N0
(11)
式中K——中間噴頭為起點的編號,K=1代表靠近中間噴頭左側(cè)第1個噴頭,K=-1代表靠近中間噴頭右側(cè)第1個噴頭
EGkt——噴頭坐標東向投影值,m
NGkt——噴頭坐標北向投影值,m
Δ——均勻分布噴頭間距,m
2.3 噴頭位姿估計
使用的GNSS和IMU傳感器為相互獨立器件,需GNSS/IMU傳感器的數(shù)據(jù)空間配準后,采用具有魯棒性好、動態(tài)性能佳、實時精度高等特性的松耦合卡爾曼濾波算法進行噴頭位姿數(shù)據(jù)融合,以獲取噴頭高頻位姿信息,噴頭位姿估計系統(tǒng)架構(gòu)如圖3所示。
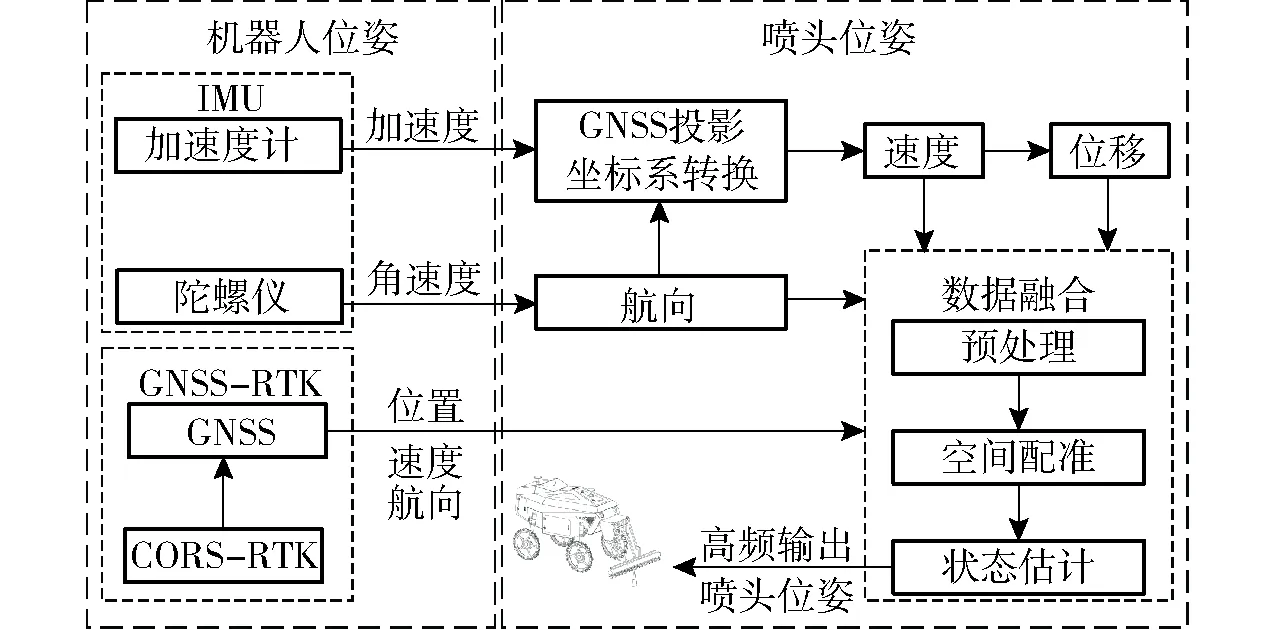
圖3 噴頭位姿估計系統(tǒng)架構(gòu)Fig.3 Nozzle attitude estimation system architecture
在該系統(tǒng)中噴頭位移為連續(xù)運動,GNSS和IMU傳感器信息均為離散型數(shù)據(jù),參考卡爾曼濾波差分方程描述方法,離散化的噴頭位姿狀態(tài)模型和觀測方程可表示為[22]
Xk=Ak,k-1Xk-1+BUk-1+ΓkWk-1
(12)
Zk=HkXk+Vk
(13)
其中
(14)
式中Xk——k時刻的噴頭位姿狀態(tài)估計量
Ak,k-1——k-1時刻到k時刻的噴頭運動狀態(tài)轉(zhuǎn)移矩陣
B——控制矩陣Uk-1——控制輸入
Γk——系統(tǒng)噪聲影響矩陣,表示由k-1時刻到k時刻各個噴頭狀態(tài)量噪聲影響各個狀態(tài)量的程度
Wk-1——k-1時刻的系統(tǒng)噪聲
Zk——k時刻的觀測矢量
Hk——k時刻的觀測矩陣
Vk——k時刻的觀測噪聲
根據(jù)卡爾曼濾波遞推關(guān)系,進行相關(guān)參數(shù)預(yù)測,即
(15)
(16)
Q——系統(tǒng)過程協(xié)方差矩陣,根據(jù)傳感器誤差和噴頭沉積情況設(shè)定初始值
卡爾曼濾波參數(shù)更新為
(17)
(18)
(19)
式中Kk——卡爾曼增益
Pk——更新后的協(xié)方差矩陣,根據(jù)傳感器誤差和噴頭沉積情況設(shè)定初始值
R——協(xié)方差矩陣H——觀測矩陣
I——單位矩陣
通過GNSS/IMU信號融合,得到各噴頭的位姿分量最優(yōu)估計值,分別記為噴頭朝向角kθ,噴頭坐標投影值kE、kN,噴頭速度分量kvE、kvN。
3 霧滴定向沉積控制
3.1 霧滴沉積位置估計
參考噴頭對靶施藥覆蓋區(qū)域坐標求解方法[13-14],霧滴沉積預(yù)估中心位置可表示為
(20)
(21)
m——霧滴質(zhì)量,kg
η——液滴與空氣的摩擦因數(shù)
t——液滴在空氣中的總運動時間,s
3.2 噴頭控制規(guī)則
(p0p1×p0S)(p2p3×p2S)≥0
(22)
(p3p0×p3S)(p1p2×p1S)≥0
(23)
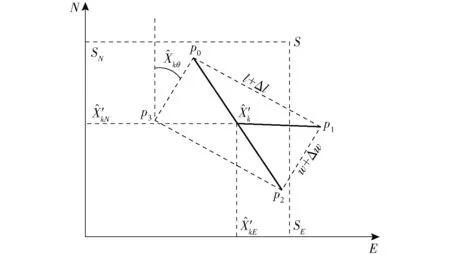
圖4 噴頭響應(yīng)邊界示意圖Fig.4 Nozzle response boundary diagram
為避免田間靶標物體空間分異性對施藥準確性的影響,可通過調(diào)節(jié)Δl和Δw改變噴頭響應(yīng)范圍,降低作業(yè)分辨率,以應(yīng)對較大尺寸靶標物體,提高植保裝備對靶施藥準確率。
3.3 噴頭響應(yīng)控制系統(tǒng)
噴頭響應(yīng)控制流程圖如圖5所示。

圖5 噴頭響應(yīng)控制流程圖Fig.5 Nozzle response control flow chart
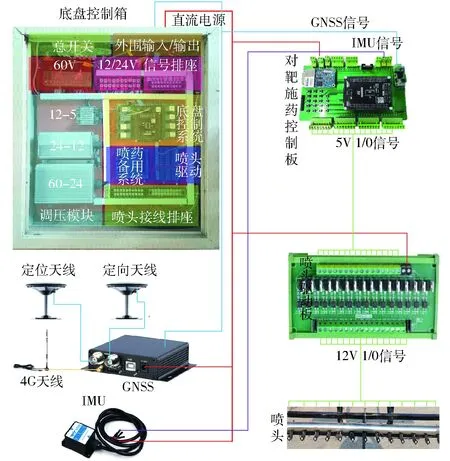
圖6 對靶施藥系統(tǒng)電路鏈接示意圖Fig.6 Schematic of circuit link to targeted spraying system
對靶施藥系統(tǒng)電路如圖6所示。對靶施藥機器人通過60 V鋰電池供電,通過底盤控制箱降壓至24、12、5 V,對底盤行走系統(tǒng)、GNSS系統(tǒng)、對靶施藥控制系統(tǒng)等進行供電。對靶施藥控制系統(tǒng)以STM32F407ZGT6為核心,根據(jù)各噴頭估計覆蓋區(qū)域,與內(nèi)存卡中處方圖靶標信息進行匹配,匹配成功后通過核心板I/O口發(fā)送1/0指令給光電隔離驅(qū)動板控制對應(yīng)噴頭響應(yīng)動作,直至完成對靶施藥作業(yè)。
4 試驗與結(jié)果分析
對靶施藥控制系統(tǒng)噴頭單次響應(yīng)時間極短,難以通過作業(yè)過程中的系統(tǒng)滯后時間檢測方法進行測量。鑒于對靶施藥的霧滴沉積位置可見性,使用霧滴沉積偏移位置檢測方法可間接評價系統(tǒng)的信號誤差和延遲。為驗證基于霧滴沉積位置預(yù)估的對靶施藥噴頭控制方法,在機器人作業(yè)速度范圍內(nèi),開展對靶施藥控制方法驗證與性能評價試驗[18-19]。
4.1 試驗條件
試驗于2021年5月15日—6月25日在黑龍江省哈爾濱市香坊區(qū)向陽試驗基地進行,試驗場地分別為基地田間道(平整場地)和玉米田。基地位于126.92°E,45.77°N,地勢平坦,田間試驗玉米生長時期為3~5葉期,株高為350~540 mm,設(shè)置懸掛高度約為600 mm,當(dāng)前高度霧滴覆蓋尺寸約為158 mm×60 mm。田間雜草密度為3~126株/m2,雜草俯視外接圓直徑為55.0~232.2 mm。試驗期間地面空氣流速為0.5~1.6 m/s,天氣多云,白天平均溫度13~21℃。試驗設(shè)備為對靶噴施機器人、高精度測地儀、大疆精靈4 RTK無人機等。
為便于開展霧滴沉積偏移距離數(shù)據(jù)獲取,經(jīng)測試,選擇使用油漆模擬靶標物體,通過無人機(大疆精靈4 RTK)獲取地面圖像,并使用文獻[23]中的圖像處理方法,獲取校準后的圖像靶標位置,使用高精度測地儀(上海華測i50型,精度±2.5 mm)進行靶標位置的精度驗證,靶標位置偏差平均值為6 mm,地面模擬靶標物體識別準確率為100%,試驗設(shè)備及場地情況,如圖7所示。

圖7 試驗設(shè)備及場地Fig.7 Test equipment and site
4.2 試驗方案
將GNSS/IMU信號融合霧滴沉積位置預(yù)估噴頭控制方法、基于GNSS信號霧滴沉積位置預(yù)估噴頭控制方法、GNSS/IMU結(jié)構(gòu)解算(噴頭相對定位點的結(jié)構(gòu)關(guān)系,2.2節(jié))噴頭控制方法、GNSS結(jié)構(gòu)解算噴頭控制方法開展對比試驗。對比因素為機器人自動駕駛區(qū)間內(nèi)的作業(yè)速度為0.5、1.0、1.5、2.0 m/s,試驗指標為對靶施藥準確率和霧滴沉積偏移距離。其中,霧滴沉積偏移距離為霧滴沉積中心與油漆模擬的靶標物體中心距離,對靶施藥準確率計算式為
(24)
式中Ac——對靶施藥準確率
Yc——霧滴覆蓋樣本數(shù)
Zc——噴施區(qū)域靶標樣本總數(shù)
在完成平整場地模擬試驗后,選取符合大田對靶施藥作業(yè)準確率要求的組合,進一步開展大田對靶施藥驗證。
機器人在試驗準備區(qū)前進速度穩(wěn)定后,進入對靶施藥模擬區(qū)域,每次試驗重復(fù)3次,以每次試驗結(jié)果的平均值為評價標準。使用文獻[18-19]中的方法進行評價。
4.3 試驗結(jié)果與分析
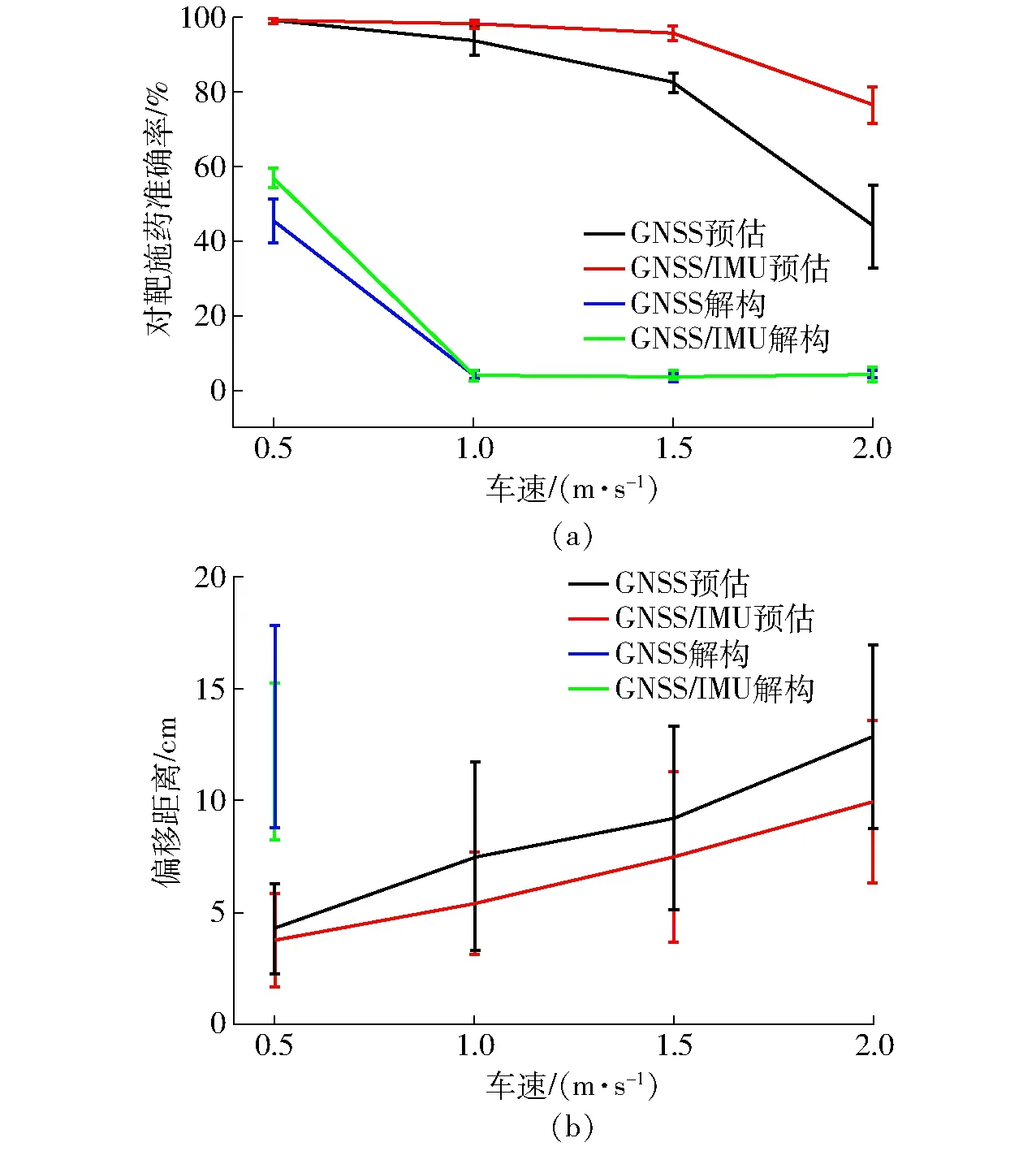
圖8 對比試驗結(jié)果Fig.8 Results of contrast test
機器人試驗結(jié)果如圖8所示。由圖8可知,使用GNSS/IMU信號融合預(yù)估控制方法的對靶施藥平均準確率和霧滴沉積偏移距離分別為92.6%、6.7 cm,優(yōu)于GNSS預(yù)估控制方法的80.0%、8.5 cm,性能分別提高了15.8%、21.1%。使用GNSS/IMU結(jié)構(gòu)解算方法的對靶施藥平均準確率為1.6%,使用GNSS結(jié)構(gòu)解算方法的對靶施藥平均準確率為2.3%,在作業(yè)速度為0.5 m/s時,霧滴沉積偏移距離分別為11.8、13.3 cm。當(dāng)作業(yè)速度大于1 m/s時,霧滴沉積偏移距離過大,由于靶標分布距離較近,出現(xiàn)了霧滴沉積偏移后仍將覆蓋靶標區(qū)域覆蓋的情況,造成了準確率統(tǒng)計值偏大。霧滴沉積預(yù)估噴頭控制方法對靶施藥的平均準確率比結(jié)構(gòu)解算噴頭控制方法高97.6%。出現(xiàn)該情況的原因,可能是沒有進行霧滴沉積位置的預(yù)估,造成沉積位置滯后,試驗結(jié)果表明:結(jié)構(gòu)解算噴頭控制方法不能滿足對靶施藥作業(yè)需求。因此,下文僅對霧滴沉積預(yù)估的噴頭控制方法進行分析、討論。
由圖8a可知,隨著機器人作業(yè)速度的增加,對靶施藥準確率下降。當(dāng)作業(yè)速度為0.5 m/s時,GNSS/IMU信號融合預(yù)估控制方法和GNSS預(yù)估控制方法對靶施藥準確率分別為99.8%、99.6%,作業(yè)速度大于0.5 m/s時,GNSS/IMU信號融合預(yù)估控制方法的施藥準確率高于GNSS預(yù)估控制方法的對靶施藥準確率。這是由于機器人在低速行駛時,GNSS數(shù)據(jù)更新頻率滿足低速作業(yè)要求。當(dāng)作業(yè)速度分別為1.0、1.5、2.0 m/s時,GNSS/IMU信號融合預(yù)估控制方法的施藥準確率分別為98.4%、95.9%、76.5%,GNSS預(yù)估控制方法的施藥準確率分別為93.8%、82.5%、44.0%,說明機器人以較快速度行駛時,GNSS/IMU信號融合預(yù)估控制方法可提高對靶施藥準確率。當(dāng)作業(yè)速度大于1.5 m/s時,GNSS/IMU信號融合預(yù)估控制方法和GNSS預(yù)估控制方法的施藥準確率均出現(xiàn)明顯下降,但GNSS/IMU信號融合預(yù)估控制的下降速率小于GNSS預(yù)估控制,說明在當(dāng)前作業(yè)分辨率尺度下,使用GNSS/IMU信號融合預(yù)估控制方法提高了對靶施藥準確率。
由圖8b可知,隨著機器人作業(yè)速度的增加,對靶施藥過程中的霧滴沉積偏移距離增加。當(dāng)作業(yè)速度為0.5 m/s時,GNSS/IMU信號融合預(yù)估控制方法和GNSS預(yù)估控制方法的偏移距離分別為4.3、3.8 cm,GNSS/IMU信號融合預(yù)估控制方法的標準差比GNSS預(yù)估控制方法的標準差低0.07 cm,進一步驗證了機器人低速行駛時,GNSS預(yù)估控制方法可滿足作業(yè)需求,且在當(dāng)前速度下作業(yè),大部分霧滴沉積覆蓋居中性較好,如圖9a所示。作業(yè)過程中,雖然沉積霧滴實現(xiàn)了靶標區(qū)域的全覆蓋,但在作業(yè)時存在拖尾現(xiàn)象,如圖9b、9c所示,可能是形成沉積偏移距離統(tǒng)計結(jié)果較大的原因。當(dāng)作業(yè)速度為1.0 m/s時,GNSS/IMU信號融合預(yù)估控制方法和GNSS預(yù)估控制方法的偏移距離分別為5.4、7.5 cm。當(dāng)作業(yè)速度為1.5 m/s時,GNSS/IMU信號融合預(yù)估控制方法和GNSS預(yù)估控制方法的偏移距離分別為7.5、9.2 cm,均有不同程度的霧滴沉積縫隙,如圖9d所示,出現(xiàn)縫隙的原因可能是由于電磁噴頭響應(yīng)頻率有限導(dǎo)致。當(dāng)作業(yè)速度為2 m/s時,GNSS/IMU信號融合預(yù)估控制方法和GNSS預(yù)估控制方法的偏移距離分別為10.0、12.9 cm,GNSS預(yù)估控制方法的作業(yè)效果如圖9e所示,霧滴沉積位置出現(xiàn)了較大的偏移,且對靶施藥準確率較低。GNSS/IMU信號融合預(yù)估控制方法作業(yè)的大部分效果如圖9f所示,雖對靶施藥準確率較高,沉積面積較大,但對小目標靶標物體易形成漏噴,沉積尺寸遠大于目標尺寸,經(jīng)過測試,小目標物體形成漏噴的主要原因為電磁閥頻率較低不能及時響應(yīng)造成。通過試驗表明,靶標物體聚集區(qū)域內(nèi)密度越高,對靶施藥準確率越高,越不容易形成漏噴,如圖9g中部聚集區(qū)域所示。同時,靶標物體的識別準確率也將直接影響對靶施藥準確率,因此,在正常作業(yè)過程中,應(yīng)首要保證靶標物體的識別準確率。
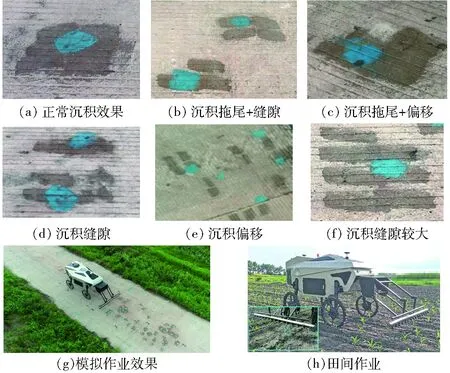
圖9 作業(yè)效果對比Fig.9 Comparison of operation effects
為進一步驗證機器人田間對靶施藥性能,開展玉米大田對靶除草試驗驗證。使用無人機獲取田間正射影像,用YOLO v5進行田間雜草檢測形成處方圖,控制機器人進行對靶施藥作業(yè)。目前對靶施藥除草相關(guān)作業(yè)標準空缺,參考GB/T 36007—2008[24]及文獻[25]對靶施藥作業(yè)除草率,選擇模擬試驗中準確率大于95%的組別開展田間試驗驗證。因此,選擇GNSS/IMU信號融合預(yù)估控制方法在作業(yè)速度0.5、1.0、1.5 m/s,和GNSS預(yù)估控制方法在作業(yè)速度為0.5 m/s,開展大田對靶施藥驗證試驗。由于田間噴霧后藥液散失較快,無法進行偏移距離統(tǒng)計,因此,僅統(tǒng)計對靶施藥準確率。將水敏紙固定在無遮擋的雜草上,作為靶標物體,試驗結(jié)束后,通過統(tǒng)計水敏紙著色情況,判斷對靶施藥準確率[26]。通過試驗結(jié)果可知,GNSS/IMU信號融合預(yù)估控制方法的田間試驗施藥準確率平均值分別為98.7%、96.7%、95.3%,平整地面的施藥準確率平均值分別為99.8%、98.4%、95.9%,分別降低1.1、1.7、0.6個百分點。可能是由于田間地勢起伏造成懸掛晃動使得對靶施藥準確率降低[27]。為檢驗田間對靶施藥除草效果,作業(yè)完成14 d后進入田間查看并統(tǒng)計雜草滅殺效果,雜草滅殺率分別為99.1%、97.2%、95.9%、98.2%,這可能是由于作業(yè)過程中藥液漂移造成統(tǒng)計結(jié)果偏高,或在噴灑作業(yè)過程中已經(jīng)噴灑到了雜草葉片上,但沒有沉積在水敏紙上,造成前期統(tǒng)計結(jié)果偏低。同時,在未噴灑區(qū)域,有數(shù)量較少的新生雜草出現(xiàn),通過追蹤調(diào)查發(fā)現(xiàn),不會對后期玉米生長產(chǎn)生影響,因此并未列入統(tǒng)計結(jié)果。
通過以上分析可知,對靶施藥作業(yè)過程中使用GNSS/IMU信號融合的霧滴沉積位置預(yù)估噴頭控制方法,可提高對靶施藥精準度,減小霧滴沉積偏移誤差。與GNSS信號霧滴沉積位置預(yù)估噴頭控制方法相比,對靶施藥平均準確率提高了12.6個百分點,霧滴沉積平均偏移距離減小了1.8 cm。對靶施藥與變量施肥、精準播種作業(yè)場景相比,作業(yè)精準度要求更高,信號處理速度要求更快。為實現(xiàn)更高分辨率的對靶施藥,應(yīng)進一步開展高頻信號輸出、電磁噴頭響應(yīng)、行駛速度波動、壓力波動滯后、靶標大小等的相關(guān)研究,以解決對靶施藥過程中形成的沉積縫隙、作業(yè)速度限制等問題[28-32]。從而在保證防效與兼顧效益的前提下,適當(dāng)提高對靶施藥作業(yè)分辨率,減小靶標區(qū)域外的施藥面積,降低環(huán)境污染。
5 結(jié)論
(1)提出了一種基于GNSS/IMU信號融合的對靶施藥噴頭位姿估計與霧滴定向控制方法,該方法能夠提高對靶施藥準確率,減小霧滴沉積偏移距離。
(2)提出了對靶施藥模擬試驗方法,該方法能夠在近乎自然環(huán)境下,準確記錄對靶施藥準確率和霧滴沉積偏移距離。
(3)通過模擬試驗對比可知,使用GNSS/IMU信號融合的霧滴沉積位置預(yù)估噴頭控制方法,能夠提高對靶施藥準確率,減小霧滴沉積偏移。該研究可為高分辨率對靶施藥、施肥、播種等的物料定向控制方法,提供參考依據(jù)。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:25:42
故事大王(2016年7期)2016-09-22 17:30:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25