基于遺傳算法的三臂輪系式栽植機構多位姿運動綜合
2022-08-05 00:36:44徐亞丹俞高紅NGAMBOULONTSIGervais黃佳輝
農業機械學報 2022年6期
關鍵詞:設計
王 磊 孫 良,2 徐亞丹 俞高紅,2 NGAMBOU LONTSI Gervais 黃佳輝
(1.浙江理工大學機械與自動控制學院,杭州 310018;2.浙江省種植裝備技術重點實驗室,杭州 310018;3.杭州職業技術學院,杭州 310018)
0 引言
栽植機構是蔬菜穴盤苗自動移栽機的核心工作部件之一,其性能直接影響移栽機工作效率和缽苗栽植質量[1-2]。
目前,常見的栽植機構主要有鉗夾式、撓性圓盤式、導苗管式、多連桿式、行星輪-滑道式、行星輪系式等[3-6]。其中鉗夾式、撓性圓盤式、導苗管式需配合開溝器使用,與我國蔬菜起壟種植的農藝要求不符。多連桿式栽植機構設計靈活、制造簡便,但作業時慣性力較大,并且一般僅能配備一個栽植器,不適合高速栽植作業,如日本井關2行半自動蔬菜移栽機的七桿式栽植機構[7],陳建能等[8]、尹文慶團隊[9-10]提出的多桿式栽植機構。日本洋馬公司研制的自動蔬菜移栽機采用行星輪-滑道式栽植機構[11],其由于滑道式導軌易磨損和單栽植嘴工作的特點,栽植效率僅為60株/(min·行),栽植效率難以進一步提高。
非圓齒輪行星輪系式栽植機構具有結構緊湊、工作平穩、可設置多個栽植器實現高效移栽等特點,已經成為旱田高速移栽機栽植機構研究的一個重要方向[12-13]。文獻[14-17]通過編寫人機交互可視化設計軟件的方式對多種非圓齒輪行星輪系栽植機構進行了運動學分析與設計,但該種方法對設計者的經驗要求較高,且需要多次重復試湊才能得到滿意的機構參數。此外,目前行星輪系式栽植機構大多對稱布置兩個栽植器,機構旋轉1周栽植2次,其栽植效率還具有提高潛力。為提高蔬菜缽苗自動移栽機取苗效率,本課題組設計了一種三臂回轉式蔬菜缽苗取苗機構[18],取苗效率達120株/(min·行),這要求栽植機構也必須達到相應的栽植效率。
因此,為進一步提高旱地高速自動移栽機的栽植效率,提出機構旋轉1周可栽植3次的三臂輪系式栽植機構,基于遺傳算法對其進行近似多位姿運動綜合,并對三臂輪系式栽植機構進行結構設計、虛擬仿真和模擬田間栽植試驗,驗證所提方法的正確性和三臂輪系式栽植機構的實用性。
1 三臂輪系式栽植機構結構方案
三臂輪系式栽植機構整體結構方案如圖1所示,主要以非圓齒輪行星輪系為傳動機構,以鴨嘴式栽植器為執行機構。
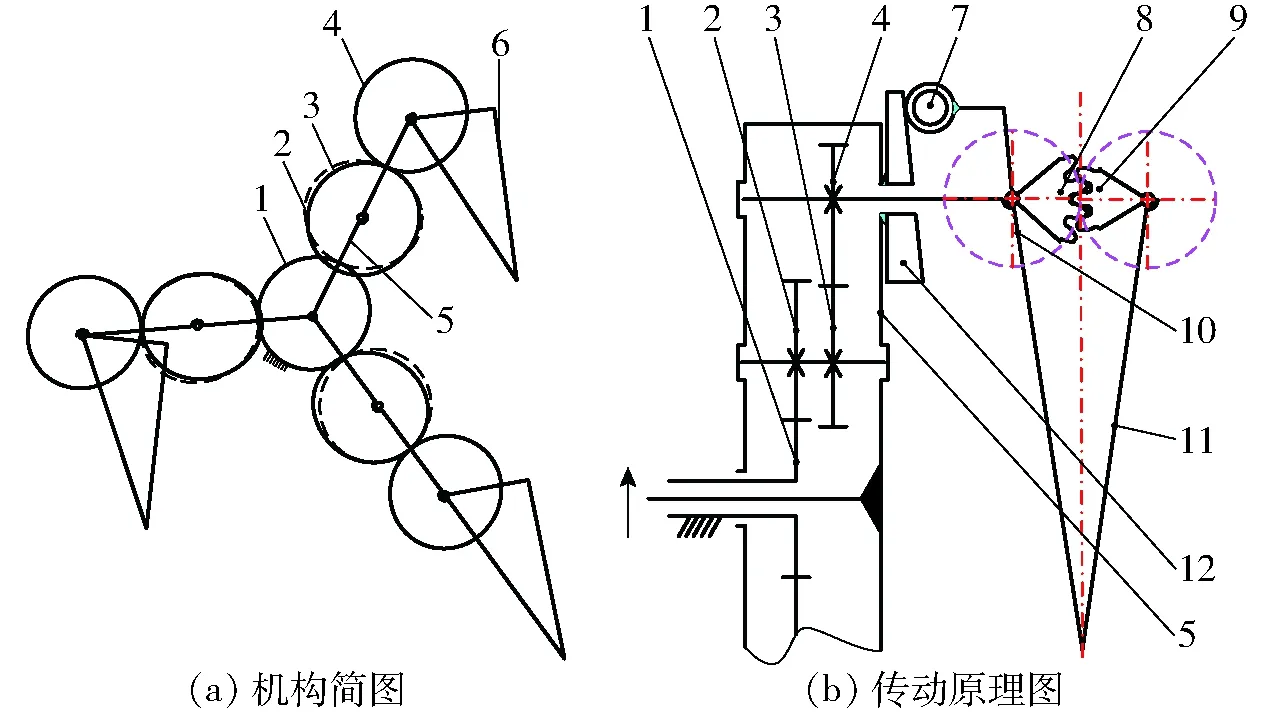
圖1 三臂輪系式栽植機構Fig.1 Three-arm gear train planting mechanism1.太陽輪 2.第一中間輪 3.第二中間輪 4.行星輪 5.行星架(輪系殼體) 6.鴨嘴栽植器 7.滾子 8.左扇形齒輪 9.右扇形齒輪 10.左鴨嘴 11.右鴨嘴 12.端面凸輪
圖1所示行星輪系主要由1個太陽輪、3個第一中間輪、3個第二中間齒輪(第一中間輪和第二中間輪同軸)和3個行星輪組成,且各齒輪都是非圓齒輪,3個鴨嘴栽植器分別與3個行星輪固聯。如圖1b所示,機構工作時太陽輪與機架固聯保持相對靜止,動力由輸入軸輸入帶動行星架(輪系殼體)勻速轉動,通過輪系內非圓齒輪嚙合傳動使得行星輪相對行星架做反方向非勻速轉動。固接在行星軸上的鴨嘴栽植器(包括滾子、左右扇形齒輪、左右鴨嘴)做絕對運動為周期性的非勻速擺動,從而形成了缽苗栽植所需的運動軌跡與姿態。同時,在鴨嘴栽植器上滾子與固裝在行星架上的端面凸輪接觸作用下,控制鴨嘴栽植器的左右兩個鴨嘴閉合。栽植嘴張開閉合的方向垂直于機器前進的方向,不會推倒已經植入土中的缽苗。
該機構旋轉1周可栽植3次,在相同回轉速度情況下,栽植效率是傳統兩臂式栽植機構的1.5倍。
2 近似多位姿綜合方法
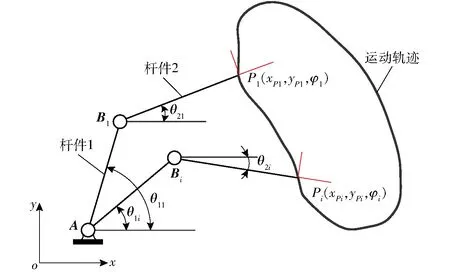
圖2 平面RR機構示意圖Fig.2 Planar RR mechanism
圖1所示的輪系式栽植機構若不考慮輪系內的齒輪約束,可以將其簡化為平面RR機構[19],如圖2所示,桿件1表示栽植機構的行星架,桿件2表示栽植機構的鴨嘴栽植器。近似多位姿運動綜合要求輪系式栽植機構的鴨嘴栽植器能夠按順序通過給定的一系列位置與姿態Pi(xPi,yPi,φi)(i=1,2,…,N),其中(xPi,yPi)為位置坐標,φi為姿態角。
如圖2所示,平面RR機構末端從第1個位姿運動到第i(i=2,3,…,N)個位姿的相對位移矩陣為
其中
XPi=xPi-xP1cosφ1i+yP1sinφ1i
YPi=yPi-xP1sinφ1i-yP1sinφ1i
φ1i=φi-φ1
取行星架回轉中心A(xA,yA,1)和經過第一個位姿時行星軸回轉中心B1(xB1,yB1,1)為設計變量,根據桿長不變條件可建立平面RR機構的運動綜合設計方程[20]
(Bi-A)T(Bi-A)=(B1-A)T(B1-A)
(i=2,3,…,N)
(1)
其中
Bi=D1iB1
將式(1)展開有
Ei1xA+Ei2yA+Ei3=0 (i=2,3,…,N)
(2)
其中

當要求機構末端通過給定的N個位姿時,有設計方程組
(3)
方程組(3)中包含N-1個方程和4個未知數(xA,yA,xB1,yB1),因此,平面RR機構運動綜合能夠精確實現的位姿數為5個,當需要實現的位姿數N>5時,平面RR機構只能近似實現給定的位姿,可由式(3)建立目標函數
(4)
其中
x=(xA,yA,xB1,yB1)
目標函數(4)將平面RR機構近似多位姿運動綜合轉化為單目標非線性最優化問題。遺傳算法[21]是一種通過模擬自然進化過程搜索最優解的方法,具有不需要初始值快速收斂等優點,可利用其快速求解得到該目標函數最小值的機構參數。同時,在實際設計當中,考慮機構運動和裝配空間的限制,可對式(4)中的4個未知量的取值范圍進行一定的限制,平面RR機構的位置角θ1i、θ2i和桿長L1、L2與設計變量之間的關系為
(5)
(6)
由式(1)可知行星軸回轉中心Bi為鴨嘴栽植器上的一個定點,所以式(6)中近似綜合所得的平面RR機構第二桿桿長L2是不變的,但在每個位置所對應的第一桿桿長L1是變化的。本文將第一個位姿所對應的L1、L2作為機構的最終參數,機構最終實現的位姿誤差是由第一桿桿長L1與后續位姿對應桿長的偏差所導致的。
3 栽植機構設計與分析
3.1 設計要求
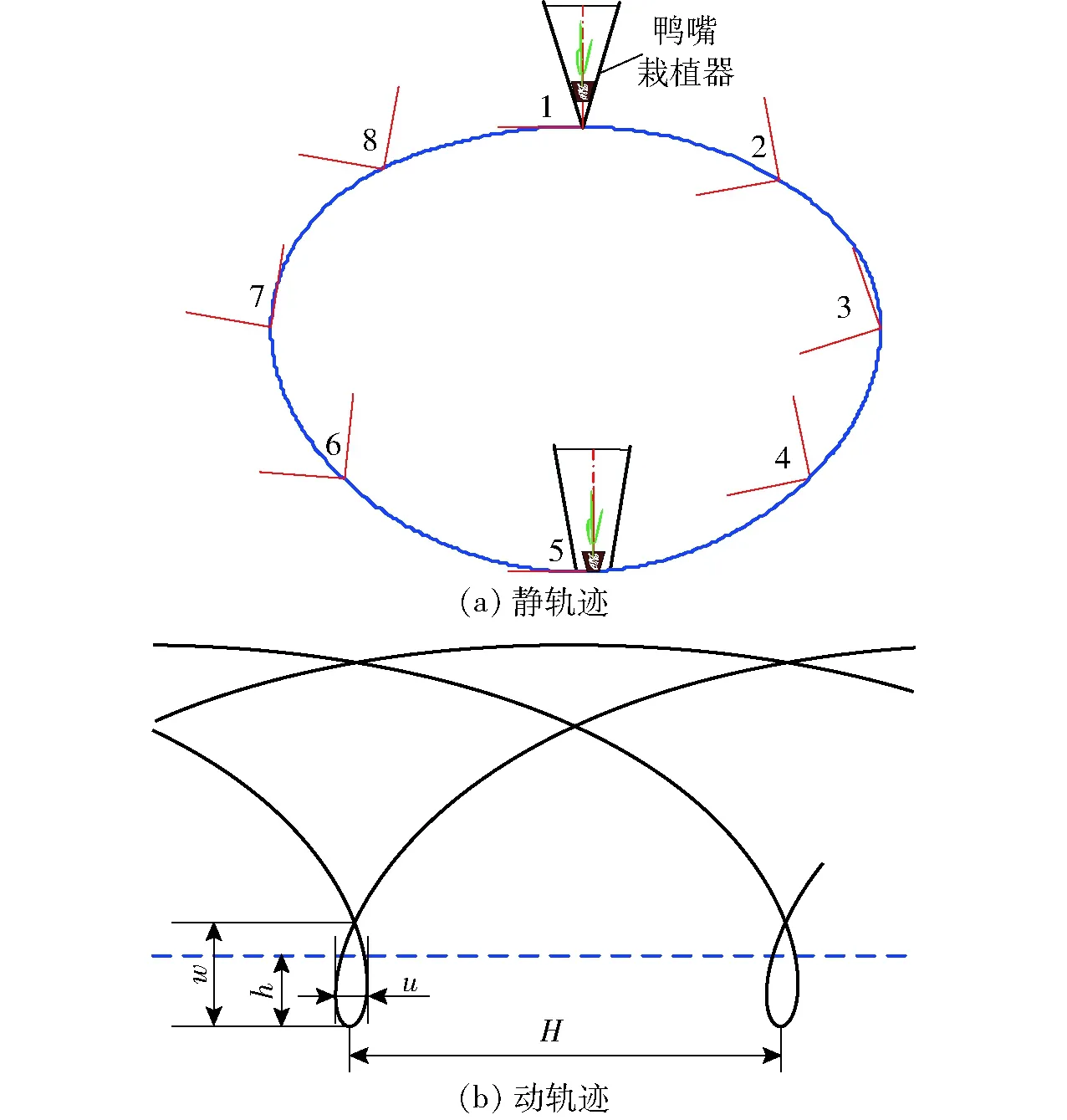
圖3 栽植軌跡Fig.3 Planting trajectory
栽植機構的作用是將缽苗完好地移栽入土,因此所設計的栽植機構要以某一特定的運動軌跡完成接苗、運苗、入土、開穴、栽植和出土等一系列周期性動作,如圖3a所示,當鴨嘴栽植器轉到栽植軌跡最上方時,取苗機構將從缽盤取出的缽苗放入鴨嘴栽植器內,栽植器處于最低位置時鴨嘴完全張開,缽苗依靠自重被植入到挖出的穴口內,然后進行覆土填壓,完成栽植過程。
根據蔬菜移栽的農藝要求,栽植靜軌跡要有一定的高度和寬度,并且在接苗點附近的軌跡要平緩,以方便接苗;栽植器入土時,栽植器與栽植平面形成的角度應盡量接近90°[15],以保證良好的破土成穴效果及缽苗直立度。同時為保證缽苗栽植直立度、減少穴口寬度,要求栽植機構絕對運動軌跡在最低點形成一個回環狀軌跡,即實現近似“零速”投苗[8];回環軌跡要求高度w≥50 mm,寬度u≤20 mm,入土深度h≥45 mm,如圖3b所示。
3.2 優化模型建立與求解
根據3.1節栽植機構設計要求從圖3a理想栽植軌跡上選取8個位姿點,具體參數見表1,栽植機構在位姿1處接苗,位姿1~5為送苗段,位姿5為植苗點,位姿5~8為機構回程段。

表1 給定位姿數據Tab.1 Given pose data
根據表1所給定的8個位姿數據,由式(3)、(4)可建立栽植機構近似經過該組給定位姿數據的目標函數F(x),設計變量為:x=(xA,yA,xB1,yB1)=(x1,x2,x3,x4)。由栽植機構安裝位置及設計結構緊湊原則設定約束條件
(7)
為了避免表1中位移數據維度的存在導致目標函數值舍入誤差的放大,本文采用將目標函數F(x)乘以一個系數(10-6)的方法來消除數據維度對目標函數值的影響,根據目標函數與約束條件在Matlab中編寫相應m文件,調用Matlab遺傳算法工具箱[21]并設置隨機產生的初始個體為200個,遺傳代數為300,每代的最優適應度如圖4所示,得到目標函數最優值為0.351 366,平均值為0.352 691,適應度函數呈收斂狀態。
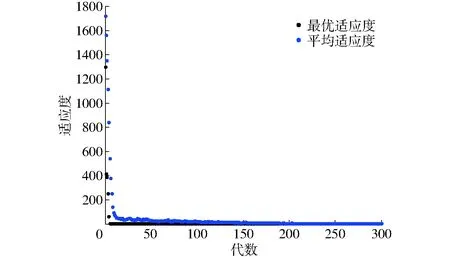
圖4 最優適應度Fig.4 Optimal fitness value
與適應度函數最優值對應的機構參數為:xA=-2.453 2 mm,yA=5.936 0 mm,xB=13.707 8 mm,yB=139.849 7 mm,將其圓整后為xA=-2.5 mm,yA=6 mm,xB=14 mm,yB=140 mm,由式(5)、(6)計算得到機構桿長和初始位置角分別為:L1=135 mm,L2=192 mm,θ11=85°,θ21=-79°。
3.3 輪系機構設計
根據平面RR機構的桿長及初始位置角,由式(5)計算得到平面RR機構在達到不同位姿時基于初始位姿1的相對角位移增量
(8)
式中 Δθ1i——行星架相對于x軸角位移增量
Δθ2i——栽植器相對于行星架角位移增量
由式(8)數據利用3次非均勻B樣條技術[22]擬合出完整周期平面RR機構相對角位移關系曲線,如圖5所示。
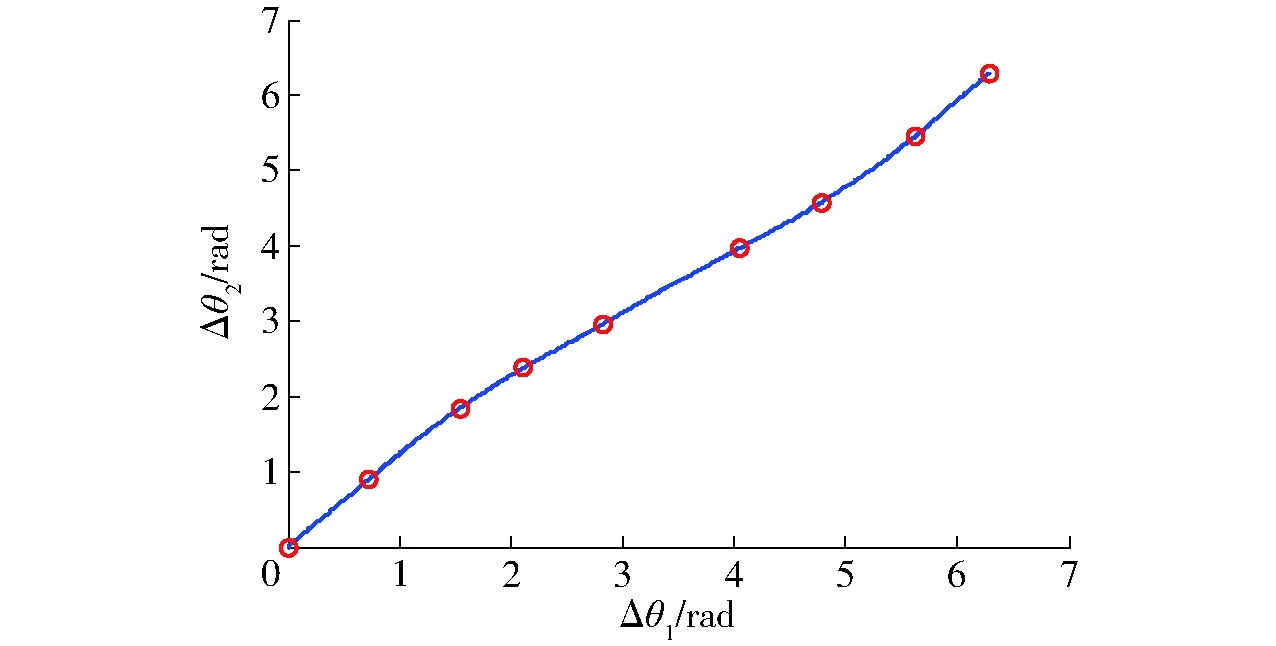
圖5 相對角位移曲線Fig.5 Relative angular displacement curve
輪系機構的總傳動比即為平面RR機構以桿件1角位移Δθ1i為橫坐標、以桿件2相對桿件1的角位移Δθ2i為縱坐標的曲線斜率的倒數,計算得到輪系機構傳動比曲線并分配[23],如圖6所示。
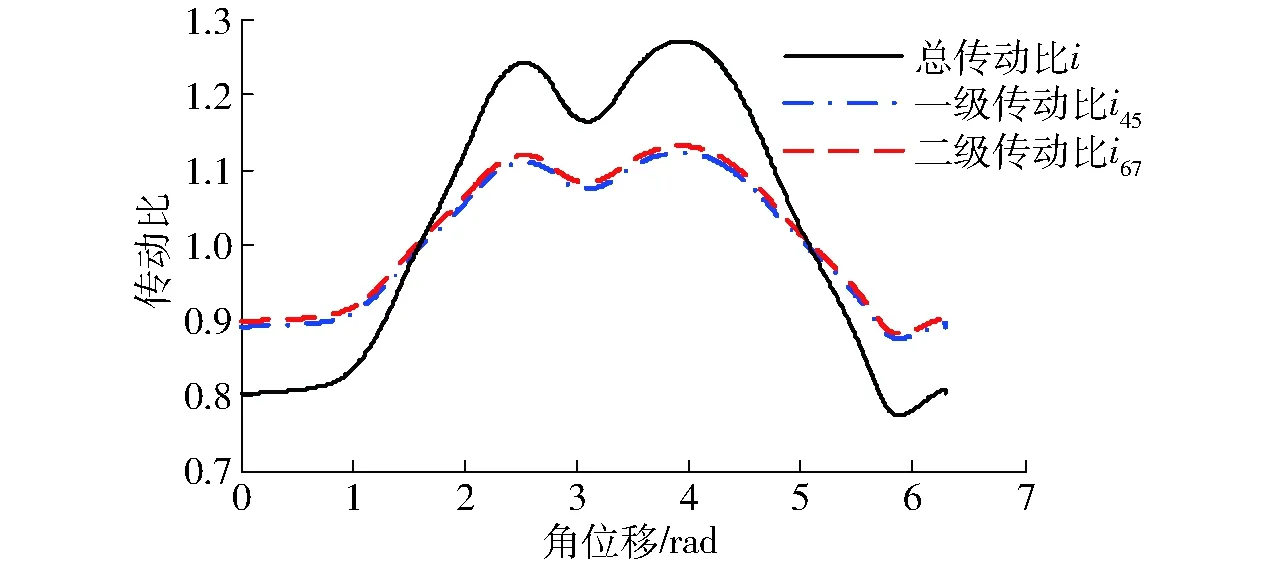
圖6 傳動比曲線Fig.6 Transmission ratio curves
根據平面RR機構結構參數及輪系機構傳動比,優化后的非圓齒輪行星輪系栽植機構如圖7所示,由生成的栽植靜軌跡可以看出,綜合得到的輪系機構可大致通過8個給定的位姿,表2為該機構所實現的8個位姿數據及誤差,通過與表1數據比較,位置坐標(xP,yP)誤差平均值為1.215、2.145 mm,姿態角φ誤差平均值為1.5°,符合機構近似運動綜合設計要求。
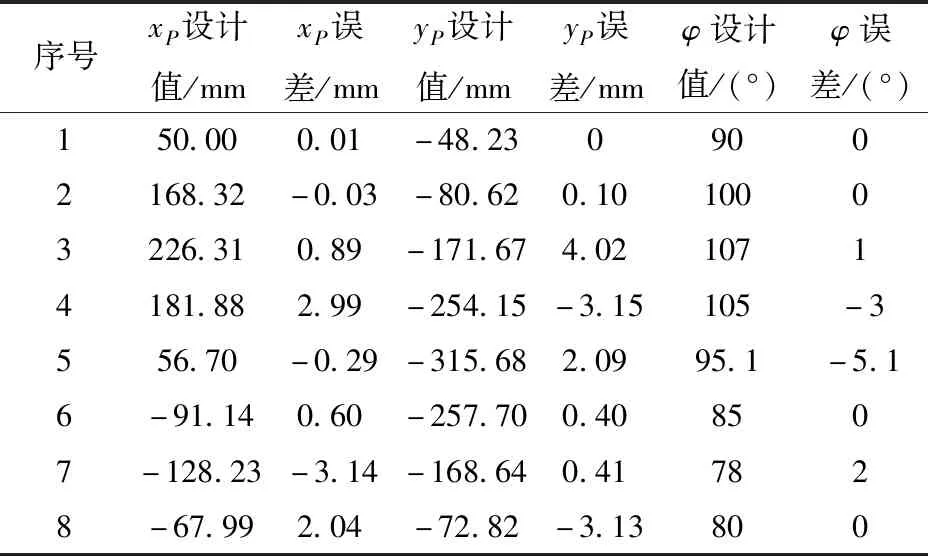
表2 理論設計位姿及誤差Tab.2 Theoretical design pose and error
從圖7中可以看出,當株距H設為300 mm時,栽植機構的絕對運動軌跡最佳,此時環扣高度w=74 mm,寬度u=16 mm,入土深度h=50 mm,均滿足設計要求。當株距為260 mm時,栽植機構動軌跡環扣變大,會造成栽植穴口變大,不利于缽苗栽植的直立性。當株距增大為340 mm時,栽植機構動軌跡在最低點沒有形成環扣,不能實現近似“零速”植苗,同樣不能保證缽苗栽植質量。
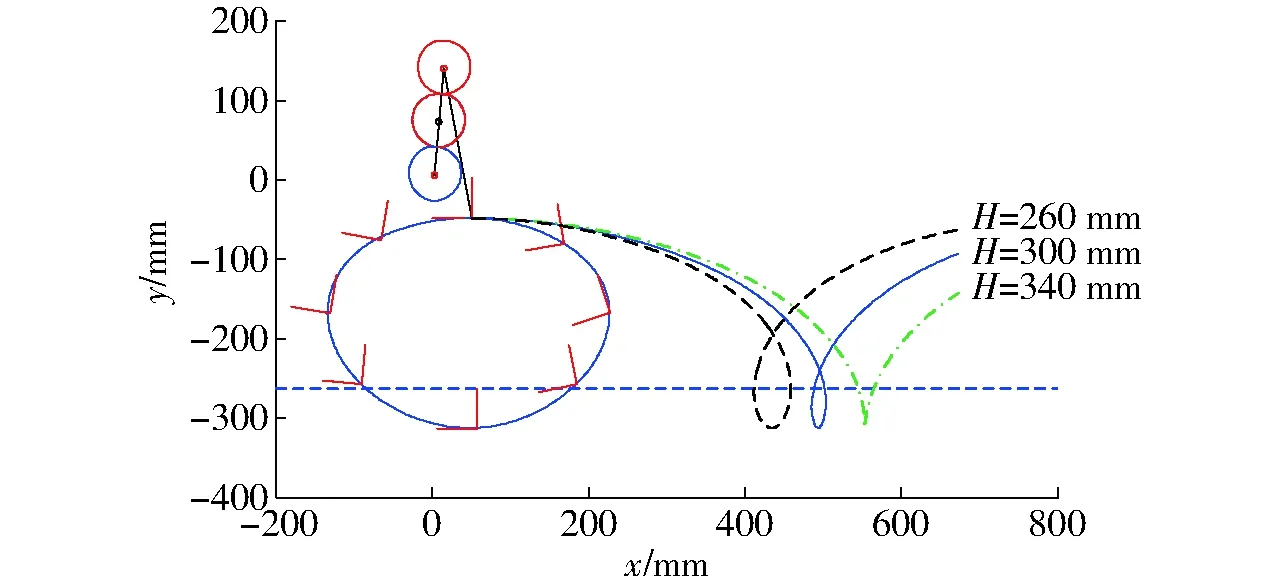
圖7 理論設計結果Fig.7 Theoretical design results
3.4 仿真分析
根據栽植機構優化所得的參數對栽植機構進行結構設計,將裝配好的三維模型導入ADAMS軟件中進行虛擬仿真,運動參數設置為:機構角速度360(°)/s、前進速度900 mm/s,此時栽植機構的株距H=300 mm,得到栽植機構的仿真軌跡(圖8)與理論軌跡(圖7)基本一致。
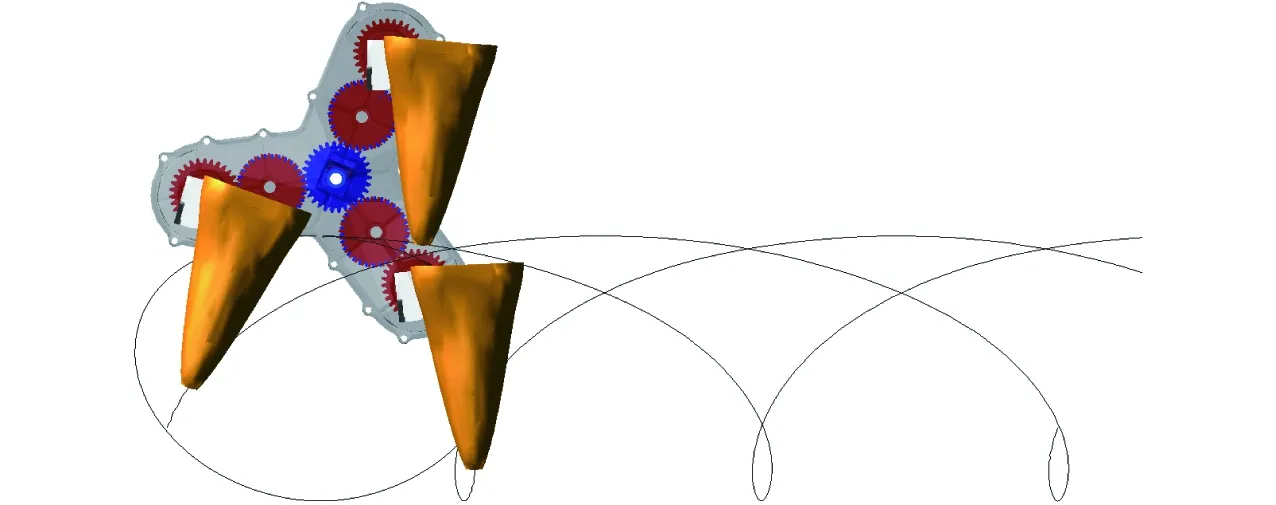
圖8 仿真軌跡Fig.8 Simulation trajectory
對其中一個鴨嘴栽植器進行位移與速度分析,得到其水平方向的位移和速度變化曲線如圖9所示,可以看出在0.4~0.6 s之間水平位移變化曲線上有一段近似水平的位移線,并且與該區間相對應的水平方向速度接近于零,表明栽植機構可以為鴨嘴式栽植器提供一個零速時間段,保證了栽植過程中缽苗栽植的穩定性。
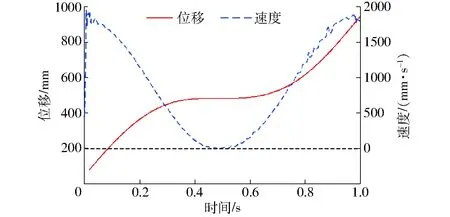
圖9 水平位移、速度仿真曲線Fig.9 Horizontal displacement and velocity curves
4 樣機試驗
為進一步驗證三臂輪系式栽植機構在實際作業過程中的運動軌跡和作業效果,加工制造了三臂輪系式栽植機構物理樣機和旱地穴盤苗移栽試驗臺(圖10)進行機構空轉與栽植試驗。
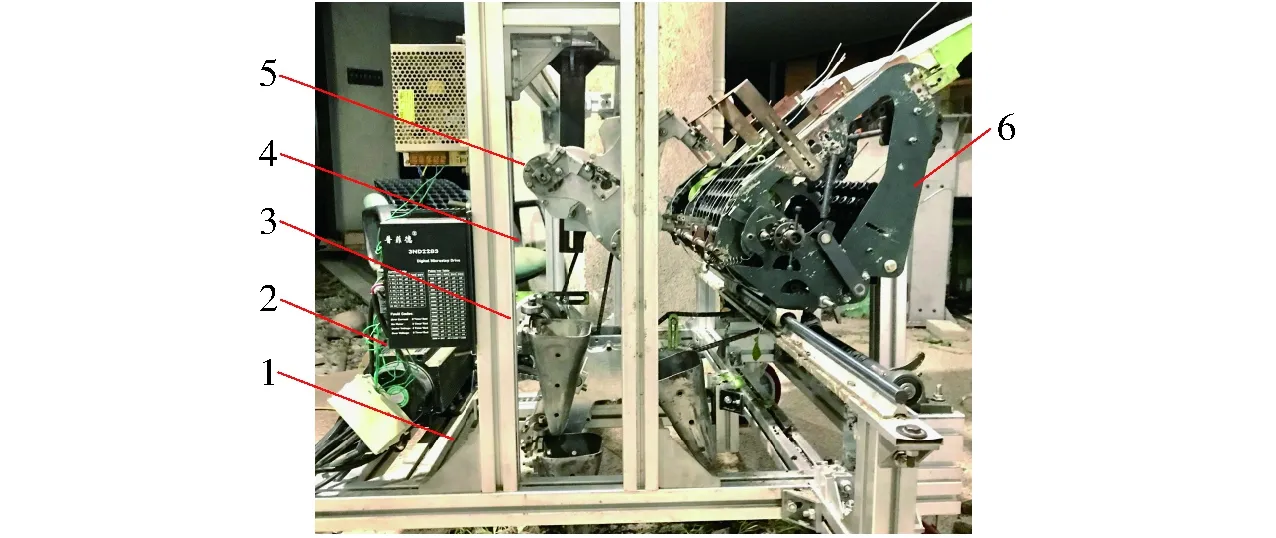
圖10 旱地穴盤苗移栽試驗臺Fig.10 Dryland plug seedling transplanting test bench1.機架 2.電機 3.三臂輪系式栽植機構 4.傳動鏈輪 5.三臂輪系式取苗機構 6.秧箱
4.1 空轉試驗
空轉試驗的目的是在排除其他干擾的狀態下,對比栽植機構的實際運動軌跡姿態與理論、仿真軌跡姿態是否一致。將加工裝配好的樣機安裝在試驗臺上,利用佳能EOS-80D型攝像機對植苗機構運動狀態進行拍攝,在Photoshop軟件中測量得到鴨嘴栽植器端點形成的實際運動軌跡與接苗、植苗時的姿態如圖11所示。
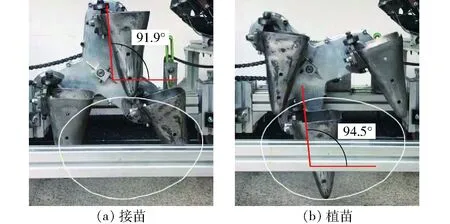
圖11 物理樣機軌跡與姿態Fig.11 Physical prototype trajectory and posture
通過比對,圖11所示的機構實際軌跡與理論、仿真軌跡基本一致。同時,測量得到栽植機構在接苗與植苗兩關鍵時刻的姿態角分別為91.9°和94.5°,與表2中接苗與植苗時刻的姿態角理論設計值(90°和95.1°)的偏差控制在±2°以內,符合設計要求。其存在的微量偏差主要由物理樣機制造和安裝誤差導致。
4.2 栽植試驗
為驗證三臂輪系式栽植機構的實際作業性能,對機構進行取苗-栽植聯合試驗,取苗機構為文獻[18]中的三臂回轉式取苗機構。試驗在浙江理工大學種植裝備試驗中心進行,將試驗臺安裝在課題組研制的旋轉式圓形土槽[24]上方,試驗臺與圓形土槽形成的相對運動可模擬機構田間種植情況,如圖12所示。

圖12 取苗-栽植試驗現場Fig.12 Seedling picking-planting test site
試驗選用苗齡為30 d左右的亮葉女貞缽苗,缽盤規格為8×16穴,缽盤上穴口尺寸為32 mm×32 mm,穴口深度為42 mm。對三臂輪系式栽植機構在相同栽植頻率不同株距情況下進行栽植試驗,栽植效果以缽苗直立度衡量:缽苗主莖與土槽地面水平夾角介于70°~110°為優良;45°~70°或110°~135°為合格;其余視為倒伏。
將栽植機構轉速保持在40 r/min,通過調節圓形土槽轉速使其線速度保持為0.52、0.60、0.68 m/s,此時對應的理論株距分別為260、300、340 mm。試驗時考慮到取苗機構的取苗成功率,試驗結果僅統計取苗機構取放成功的120株為試驗樣本,測量其直立度、株距、合格株數、優良株數等,并進行統計分析。栽植效果如圖13所示,試驗結果見表3。

圖13 不同株距下栽植效果Fig.13 Planting effect under different plant spacings

表3 栽植試驗結果Tab.3 Planting test results
由圖13和表3可以看出,栽植機構在3種不同株距下作業時,缽苗栽植直立度優良率均能達到80%以上,總的栽植成功率達到92%以上,能夠較好地滿足栽植要求。但缽苗栽植成功率隨著株距的改變有一定的起伏,主要是株距的改變導致絕對運動軌跡形成環扣大小的不同造成的,隨著株距的改變,栽植時機構對土壤攪動過大或投苗時間過短,從而影響栽植狀態,導致栽植成功率有所下降。同時可以看出在株距為300 mm時機構產生的動穴口寬度最小,說明理論設計的栽植軌跡在株距為300 mm時栽植性能最優,這與3.3節的理論分析一致。
圖14為栽植頻率120株/(min·行)、理論株距為300 mm時的整體栽植效果,可以看出,栽植的缽苗基本保持了直立狀態,其株距誤差在±5 mm以內,但栽植后的缽苗還存在部分露苗或倒伏現象。分析其原因主要為:土槽內土壤顆粒較小,并且沒有配置覆土鎮壓裝置,導致栽植機構開穴后土壤無法回流將缽苗根系覆蓋住;圓形土槽速度與栽植機構轉速不能完全匹配,導致缽苗倒伏和株距誤差的出現。
5 結論
(1)為提高蔬菜缽苗自動移栽機作業效率,提出了三臂輪系式栽植機構,該機構旋轉1周可栽植3次,在相同回轉速度情況下,栽植效率是傳統兩臂式栽植機構的1.5倍,滿足高速化移栽目標。
(2)提出了基于遺傳算法的輪系機構近似多位姿運動綜合方法。由桿長不變條件建立了平面RR機構運動綜合優化模型,并利用Matlab遺傳算法工具箱求解得到了機構最優結構參數,由機構運動參數計算得到輪系機構總傳動比并分配,實現了輪系式栽植機構的設計。
(3)通過分析比較機構理論、仿真、實際軌跡姿態和鴨嘴栽植器的位移、速度曲線,驗證了所提出方法和三臂輪系式栽植機構設計的正確性。
(4)搭建旱地穴盤苗移栽試驗臺架,進行了栽植試驗,結果表明:栽植頻率120株/(min·行),理論株距為300 mm時,栽植成功率為96.7%,實際株距均值為298 mm,平均穴口寬度為70 mm,滿足旱地栽植機械標準,驗證了三臂輪系式栽植機構的實用性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04