基于滑模控制的并聯DC/DC變換器均流控制策略*
2022-08-04 06:59:48劉曉東石文龍張前進劉宿城郝陳軍孫海濤
電氣傳動自動化 2022年4期
劉曉東,石文龍,張前進,劉宿城,郝陳軍,孫海濤
(1.安徽工業大學電力電子與運動控制重點實驗室,安徽 馬鞍山 243032;2.國家電網撫順供電公司,遼寧 撫順 113000)
隨著電力電子技術的迅猛發展,直流分布式電源并聯已成為大功率直流供電系統的重要運行方式,其系統結構如圖1所示。相對于傳統的集中式供電而言,分布式電源模塊并聯可以改變并聯模塊數量來應對不同功率的負載,使系統更靈活;模塊化設計利于實現冗余功能,提高系統可靠性;開關頻率的提高,增大了系統的功率密度[1]。分布式并聯的DC/DC變換器廣泛用于低壓直流微電網、通信設備、計算機系統以及不間斷直流供電系統[2-6]。由于分布式多模塊并聯的Buck變換器為非線性時變系統,而傳統的均流方法很難實現復雜的非線性控制策略,所以采取非線性控制策略有重要的理論意義和實用價值。
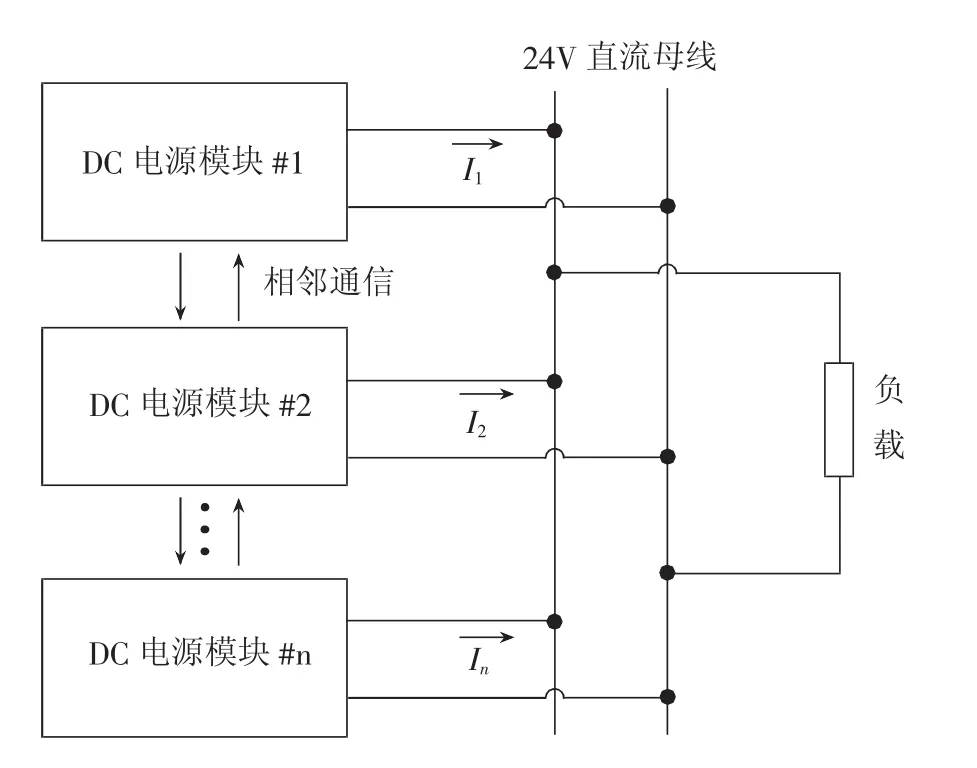
圖1 分布式并聯直流供電系統結構圖
本文針對分布式并聯的Buck變換器系統,使用魯棒性更強的積分滑模(ISM)控制器實現在電路參數不一致以及負載發生突變時,提高輸出電壓抗干擾能力和動態性能;其次,為解決分布式并聯系統的均流問題,基于離散一致性算法,只增加了稀疏弱通信環節,即可使分布式系統最終狀態達到一致;最后,通過仿真驗證了所設計的控制器既提高輸出電壓的動態品質和抗擾性,又能實現多模塊并聯電源的均流控制,提高系統的穩定性。
1 基于離散一致性算法的分布式均流控制
多個電源模塊并聯通過下垂控制,母線電壓未達到額定電壓,容易造成系統不穩定。因此多個電源模塊可通過分布式協同控制,僅與相鄰模塊通信即可實現輸出功率均衡、恢復母線電壓、即插即拔等功能。
基于圖論,考慮由n個電源模塊組成的系統,該網絡拓撲如圖2所示,構成無向圖G={V,E,A}。其中節點集合為V={v1,v2,…,vn},vi則表示為第i個節點。邊集合E?V×V,邊eij=(vi,vj)表示節點之間連通的邊,鄰接加權矩陣A=[aij],其中非對角元素aij用來表示第j個模塊的在第i個電源模塊的權重,若存在通信aij>0,否則aij=0且對角元素aij=0[13]。
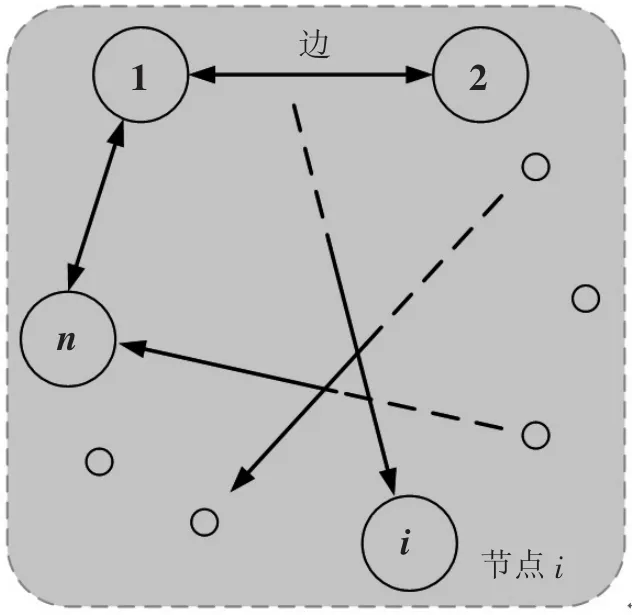
圖2 多電源模塊通信網絡拓撲圖
度矩陣D=diag{d1,d2,…,dn},令度矩陣D的行總和等于鄰接矩陣的行總和,即則圖G的拉普拉斯矩陣L=D-A,矩陣L的次小特征根決定一致性算法的收斂速度。令狀態變量X(k)=[x1(k),x2(k),…,xn(k)],xi(k)表示節點i在k時刻的狀態變量。對于任意節點i第k時刻的離散一致性算法可以表示為:

式中,ε為加權系數,通過改變ε的大小可以調節算法的收斂速度。考慮整個系統狀態變量,令矩陣P=I-εL,將上式寫成如下矩陣形式:

根據Perron-Frobenius定理,對P非負矩陣有左特征向量v=[1,1,…,1],使Pv=v成立,且存在右特征向量wT=[1,1,…,1]T,使wTP=wT和vTw=1成立。則有由上面的定理可以將式(3)改寫為:

對于整個系統拓撲的有向圖如果是平衡的,即[1,1,…,1]TL=0,則任意節點的狀態變量最終會收斂到其初始值的平均值:

圖3為所提出系統的控制結構圖,包含2個電源模塊的物理層、通信網絡層和控制層。物理層由2個電源模塊并聯到同一直流母線上。網絡層中每個模塊與相鄰模塊互相通信,實時交換母線電壓和輸出電流。控制層中由下垂控制實現電流均衡,一致性算法補償電壓跌落且進一步提高均流精度,最終實現恢復母線電壓。

圖3 分布式并聯系統控制結構圖
圖3控制層中通過電壓觀測器和電流觀測器,由電壓偏差量和電流校正項共同作用,來調節每個電源模塊的電壓參考值,進一步提高了系統的均流精度。由電壓觀測器產生的修正項如式(2)所示,而電流觀測器產生的電流校正項△i可以表示為:

式中,ci為耦合系數,為第i個電源模塊的標準值,可以寫為。當所有電源模塊電流一致時,電流修正項為零,如果電源模塊電流之間有不一致,調節器將調整電流校正項以恢復平衡。
2 積分滑模控制器的設計
2.1 并聯Buck變換器數學模型
以兩個電源模塊并聯的Buck變換器為例,電路拓撲如圖4所示。圖中,Vin、Vo和iL分別為直流輸入電壓、輸出電壓和電感電流,S、D分別為可控開關管和續流二極管,L、C和R分別為電感、電容和負載電阻。考慮Buck變換器工作在連續導通模式。
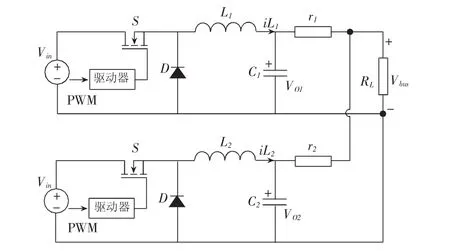
圖4 并聯Buck變換器的電路拓撲
由并聯Buck變換器在可控開關管導通和關斷下的微分方程,可以得到Buck變換器的狀態空間表達式為:
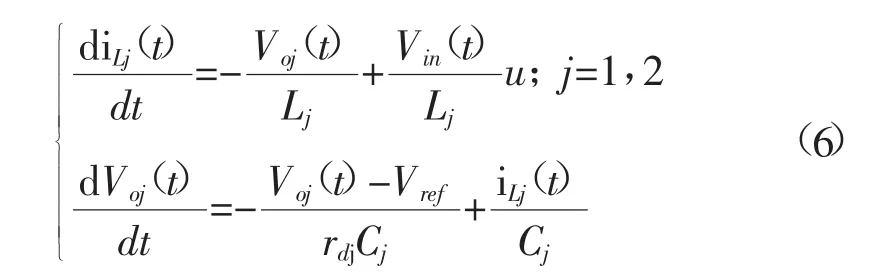
式中:iL(t)為電感電流;Vo(t)、Vin(t)分別為輸出、輸入電壓;u為開關管導通占空比,0≤u≤1。
由于輸入電壓的不可控性,采用輸出電壓作為狀態變量,電感電流作為控制變量,控制輸出電壓跟蹤到參考電壓值。定義輸出電壓誤差:

式中:x1、Vref分別為輸出電壓誤差和輸出電壓參考值。則輸出電壓誤差積分x2為:

聯合式(6)、式(7)和式(8),在無擾動的情況下,可以得出Buck變換器控制系統的狀態方程:
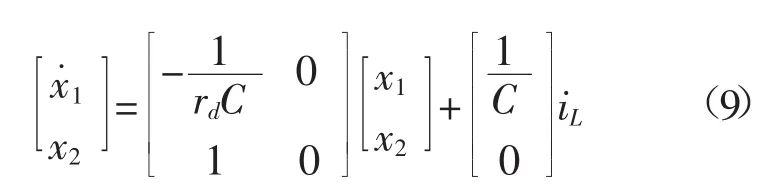
考慮外部負載擾動的影響,根據狀態方程(9)對擾動進行分離,可得系統狀態矩陣、輸入矩陣和擾動項分別為:
2.2 積分滑模面設計
本文基于電壓跟蹤誤差x1以及電壓跟蹤誤差的積分x2,設計積分滑模面:

式中,S、c1和c2分別為所設計的積分滑模面、輸出電壓誤差增益和輸出電壓誤差積分增益,且c1>0,c2>0。
滑模控制過程可以分為兩個模式,如圖5所示。在趨近模式中,軌線從空間內任意初始位置趨近滑模面,在切換控制下,使運動軌跡始終維持在滑模面附近;在滑動模式下,當滑動模態存在,且滑模面S=0上有穩定的平衡點X=0時,軌線沿著滑模面穩定在平衡點處。
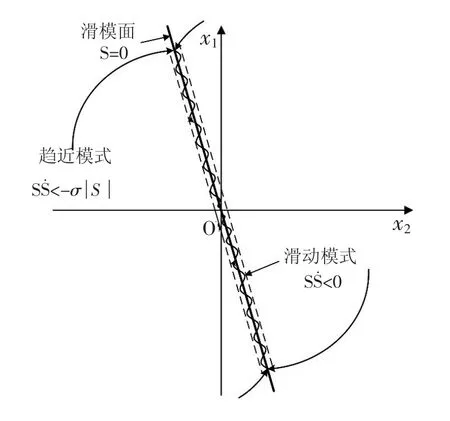
圖5 滑模控制過程示意圖
通過Lyapunov函數,判別系統的穩定性,設計出滑模函數的參數C。
假設系統為:

并且系統是穩定的,即狀態矩陣A的特征根都在左半平面,則存在任意的正定矩陣P>0、Q>0,使得XT(ATP+PA)X=-XTQX成立。令輸入變量u=-kX+v,As=A-kB,即輸入變量u為線性控制。將u帶入式(6)中得:

對于任意的正定矩陣P>0,Q>0,使AsTP+PAsT=-Q。
定義Lyapunov函數V=XTPX>0。?X≠0對V求導得:
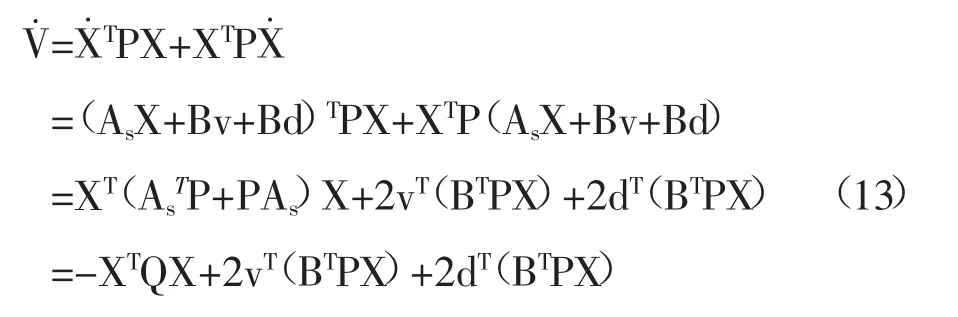
如果取滑模函數S=BTPX=CX,當系統達到滑模面上時,S=0。此時=-XTQX<0。由Lyapunov穩定性判據,當C=BTP時滑動模態穩定,系統存在滑動模態,且最終收斂于X=0。為了簡化計算,方便工程實現,一般選取CB=I。
趨近模式中S≠0,為了保證系統在有限時間內達到滑模面上,需要設計Buck變換器輸入變量I使得SS<-σ‖S‖(S≠0,σ>0)。
由式(4)、(5)可以得出滑模S的時間導數:

由CB=I,且當控制變量IL為等效控制變量Ieq時,可以得出等效控制為:

等效控制下的狀態軌跡為理想的滑模運動。僅當系統狀態已經處于滑模面上,在等效控制下保持系統狀態在滑模面上滑動,并不能使系統在有限時間內趨近滑模面。為了改善趨近階段的動態品質,需要加入切換控制項來控制滑動軌跡,使運動軌線最終到達滑模面S=0上。控制器進一步修正為:


式中,ε為邊界層厚度。

將式(14)、式(16)和式(17)代入式(18)中,可得
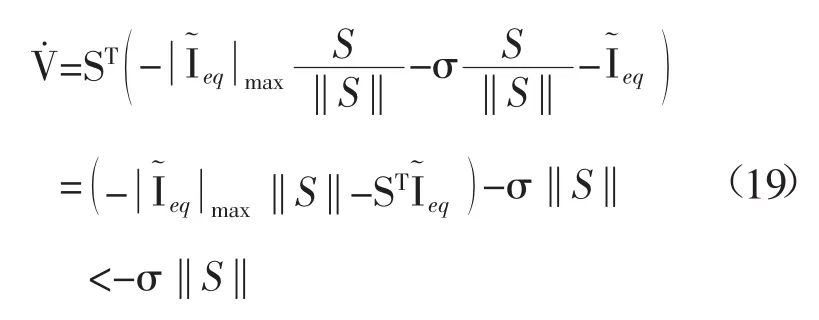

引入初始值x2(0)消除了由于積分誤差導致初始軌跡到滑模面時間過長的問題,提高系統啟動過程的響應速度。
綜上所述,選取適當的滑模面S保證系統滑動模態存在,設計參數C將直接影響滑動模態的穩定性和動態品質。對于控制項的設計,應滿足在滑模控制下系統在有限時間內到達滑模面,且維持在滑模面附近。在只了解系統參數和外部擾動的上下界的情況下,引入切換函數不僅能抑制由于參數變換和外部擾動帶來的抖振,且不依賴于系統的精確模型,具有較強的魯棒性。
3 仿真結果與分析
為了對所提方法進行驗證,依據圖3中在Matlab/Simulink中搭建由兩個Buck變換器并聯的模型,并且在控制方法上與傳統雙閉環PI控制進行比較。Buck變換器的具體規格見表1。
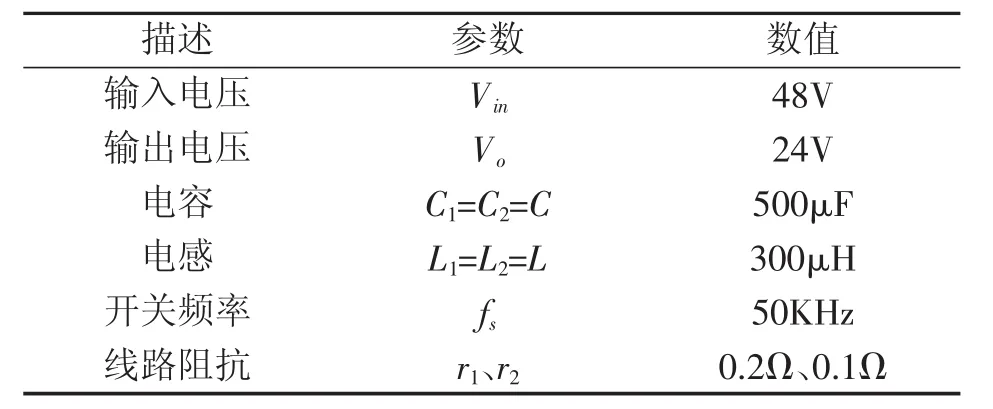
表1 Buck變換器規格
先將各個仿真的控制器的參數調至相對最優,在線路阻抗未知的情況下,下垂系數采用相同值rd=0.2。假設系統母線電壓參考值為24V,負載在t=0.5s和t=1s時,由3Ω→6Ω→3Ω跳變。圖6(a)、(b)分別顯示了,在分布式一致性算法PI控制下和在所提的分布式一致性算法滑模控制策略下母線電壓和輸出電流的仿真波形。可以看出在采用所提的控制策略下,負載跳變前補償由下垂帶來的母線電壓跌落,以及負載跳變后母線電壓仍能恢復至額定值,不同外特性條件下輸出電流實現均流。
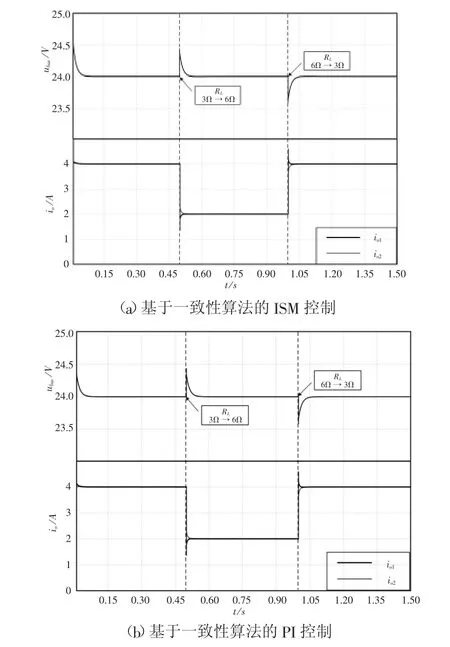
圖6 負載跳變中母線電壓和輸出電流波形
圖7為突加、突減負載時母線電壓瞬態特性曲線,可以看出當并聯變換器負載發生跳變時,母線電壓恢復過程時間以及動態響應均比PI控制更優。
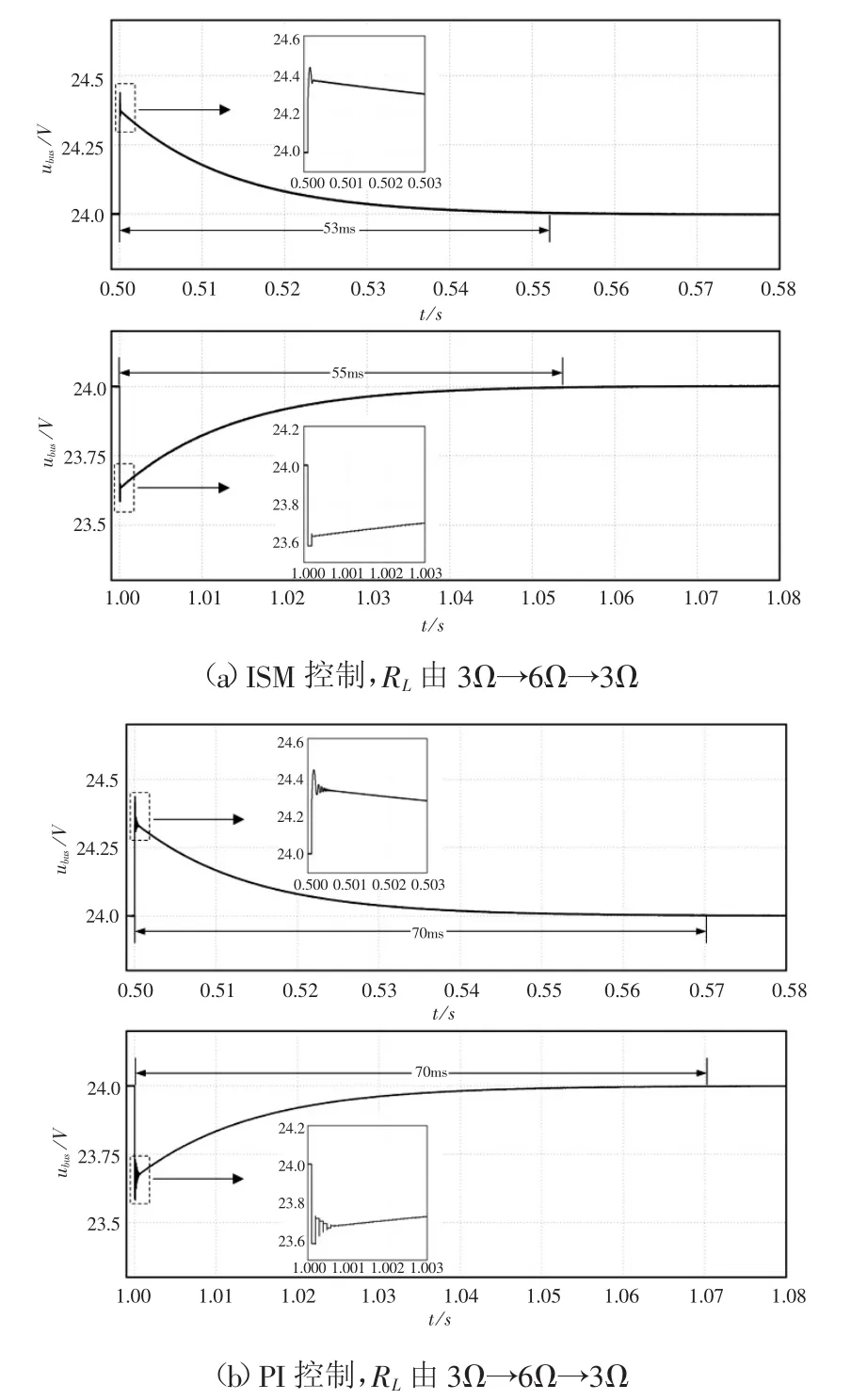
圖7 負載跳變時分布式并聯系統的母線電壓瞬態特性
圖8為在負載跳變時輸出電流實現均流的瞬態特性。可以看出此方法可以實現電流均衡,由于均流的時間由一致性迭代的次數決定,上述控制均采用相同的一致性算法,因此均流時間幾乎一致,但采用本文策略在負載跳變時,輸出電流非常穩定幾乎沒有振蕩,其動態性能相比PI控制更優。
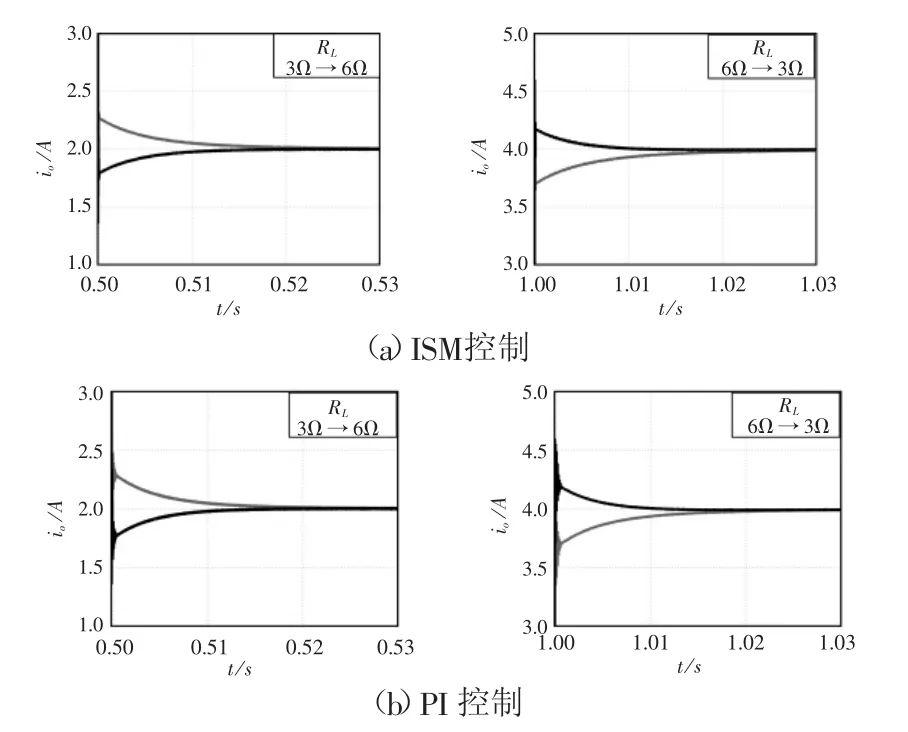
圖8 輸出電流動態均流波形
圖9為兩個模塊并聯的電感電流波形,電感電流從4A變為2A,再從2A恢復到4A的過程。可以看出系統受到階躍負載擾動時,采用基于一致性算法的ISM控制下,電感電流超調量和恢復時間均小于PI控制,證明了所提控制方法響應速度快、控制精確度高的性能優勢[15]。

圖9 電感電流輸出波形
4 結論
本文主要研究了大功率直流供電系統中并聯均流控制方法,提出使用基于一致性算法的積分滑模(ISM)控制。針對并聯DC/DC變換器在負載發生嚴重擾動的情況下,仍能保持良好的動態性能、強魯棒性和可靠性。并將傳統基于一致性的PI控制及基于一致性的ISM控制做了對比,結論如下:
(1)傳統下垂控制僅能實現輸出電流均分,并沒有考慮母線電壓的跌落,因此存在電壓偏差問題,系統不能保持穩定;基于一致性算法的下垂控制既可以實現輸出電流均衡,又能使母線電壓偏差得以消除,但負載嚴重擾動時其動態性能難以滿足要求。
(2)本文提出基于一致性算法的積分滑模(ISM)控制。不僅可以實現消除母線電壓偏差,解決電流均衡問題,而且在系統受到擾動時,可以使分布式并聯Buck變換器系統響應速度和抗干擾能力得到提升。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
