我國智能網聯汽車生產企業及產品準入管理策略研究*
2022-08-03 01:47:22朱云堯吳勝男楊志成鮑歡歡
汽車文摘 2022年8期
朱云堯 吳勝男 楊志成 鮑歡歡
(1.中國汽車工程研究院股份有限公司,重慶 404100;2.中汽院汽車技術有限公司,北京 100000)
主題詞:智能網聯汽車 汽車企業 產品 準入管理 政策建議
NHTSA 美國公路交通安全管理局
DOT 美國交通部
FVMSS 《聯邦機動車安全標準》
KBA 德國聯邦汽車運輸管理局
MLIT 日本國土交通省
1 引言
汽車產品自大規模民用化以來,在經濟拉動、擴大內需、進出口貿易以及提高綜合國力等方面發揮著巨大作用。縱觀全球,汽車強國必然是經濟與科技強國,在美國、日本、德國、法國、韓國等國家,其汽車產業產值占本國經濟總量都超過10%,結合中國產業結構,發展汽車產業是中國走向經濟與科技強國的必由之路。
智能網聯汽車是指搭載先進的車載傳感器、控制器、執行器裝置,并融合現代通信與網絡技術,實現車與X(車、路、人、云端)智能信息交換(V2X)、共享,具備復雜環境感知、智能決策、協同控制功能,可實現“安全、高效、舒適、節能”行駛,并最終可實現替代人來操作的新一代汽車。
智能網聯汽車作為科技與汽車有機融合的戰略制高點,擔負著將我國建設成為科技強國、汽車強國、交通強國、數字強國和制造強國的重任。然而,智能網聯汽車作為新型產物,其產業形態、產品功能、技術架構、標準體系和測評體系不夠成熟,這些對我國智能網聯汽車的有效監管與安全發展形成巨大挑戰,而在諸多監管挑戰中,智能網聯汽車生產企業及產品準入管理成為首個監管挑戰。
本文以高級別自動駕駛(SAE L3~L5,本文所述自動駕駛級別均采用SAE J3016 標準)汽車準入政策為研究對象,通過對我國汽車準入管理體系以及國外主流國家智能網聯汽車準入管理體系研究,提出適合我國智能網聯汽車生產企業及產品準入管理的策略建議。
2 我國汽車生產企業及產品準入管理沿革
從汽車演變發展形態看,我國機動車生產企業及產品準入管理可以分為3個階段。
第1階段是傳統燃油機動車生產企業及產品準入管理,中華人民共和國國家經濟貿易委員會于2002年11 月30 日發布《摩托車生產準入管理辦法》,并于2003 年1 月1 日起執行。2018 年12 月6 日,工業和信息化部發布《道路機動車輛生產企業及產品準入管理辦法》,并于2019年6月1日起執行,同時2002年11月30日發布的《摩托車生產準入管理辦法》廢止。
第2 階段是新能源汽車生產企業及產品準入管理,2009年6月17日,工業和信息化部發布《新能源汽車生產企業及產品準入管理規則》,并于2009年7月1 日起執行。2017 年1 月16 日,工業和信息化部發布《新能源汽車生產企業及產品準入管理規定》,并于2017年7月1日起執行,同時《新能源汽車生產企業及產品準入管理規則》廢止。2020 年8 月19 日,工業和信息化部第54 號令發布《工業和信息化部關于修改〈新能源汽車生產企業及產品準入管理規定〉的決定》修訂稿,進一步完善新能源汽車生產企業及產品準入管理。
第3階段是智能網聯汽車生產企業及產品準入管理,由于智能網聯汽車屬于新產品形態,行業內還沒有探索出相對明確可落地的準入管理辦法。2021年8月12 日,工業和信息化部發布《關于加強智能網聯汽車生產企業及產品準入管理的意見》,初步提出了針對智能網聯汽車生產企業及產品準入管理的思路。
從我國汽車生產企業及產品準入管理框架看(圖1),從道路機動車輛生產企業及產品準入管理辦法,到新能源汽車生產企業及產品準入管理規定,和智能網聯汽車生產企業及產品準入管理意見,其準入管理的基礎都要符合道路機動車輛生產企業準入條件和產品標準,在此基礎上做增量內容準入管理。
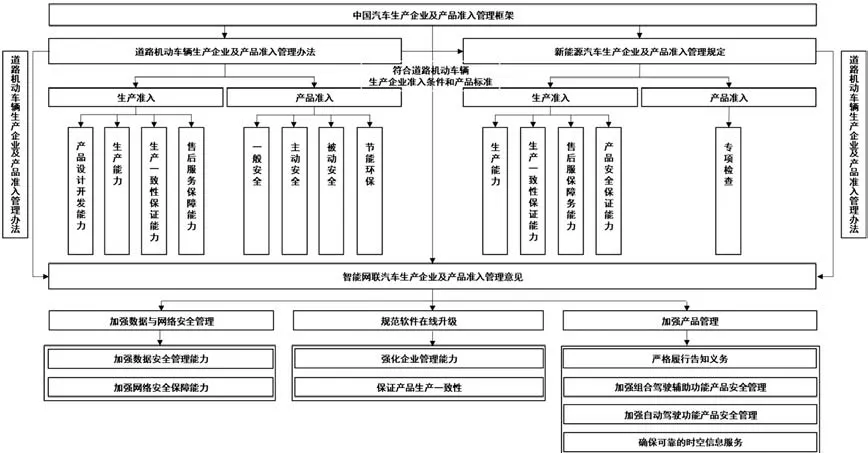
圖1 中國汽車生產企業及產品準入管理框架
我國智能網聯汽車生產企業及產品準入管理意見提出,準入管理重點在數據與網絡安全管理、軟件在線升級和產品管理3 個方面發力,但是這3 方面的管理體系成熟度參差不齊,且相關標準以推薦性標準為主。例如,在數據安全方面,《數據安全治理能力評估方法》、《汽車采集數據的安全要求》等標準正在制定中;在網絡安全方面,GB/T 40861—2021《汽車信息安全通用技術要求》已正式發布;在軟件在線升級方面,行業還未出臺統一的標準;在產品管理方面,對產品的要求包括功能安全、預期功能安全、仿真測試、封閉測試和開放道路測試,目前只有功能安全、封閉測試和開放道路測試形成了相應推薦性標準,而預期功能安全和仿真測試暫未出臺相應國標。
3 發達國家智能網聯汽車準入管理策略
通過深入對標分析發達國家針對智能網聯汽車準入管理策略,根據中國實際國情和產業發展節奏,探索提出適合中國的智能網聯汽車生產企業及產品準入管理模式。
3.1 美國智能網聯汽車準入管理策略
美國智能網聯汽車準入管理政策是經過5次政策迭代逐漸成熟,基本建立了對智能網聯汽車生產企業和產品的要求框架、明確了美國各相關管理部門的職能、職責和協同機制,在保證安全優先的基礎上大力創新發展智能網聯汽車,加速自動駕駛汽車的開發與部署。
2013 年,為進一步推動自動駕駛汽車的應用,美國公路交通安全管理局(NHTSA)發布第一個關于自動駕駛汽車政策《關于自動駕駛汽車的初步政策》,這是美國智能網聯汽車準入管理的基礎政策,為后續細化具體要求奠定了堅實基礎。該政策包括3 方面內容:
(1)NHTSA關于自動駕駛等級的定義;
(2)NHTSA 在自動駕駛汽車領域主要支持的方向;
(3)提出了各州在自動駕駛汽車測試應用方面的建議。
2016 年9 月,美國交通部(DOT)發布了業界首份關于自動駕駛設計、開發、測試和運行的完整性政策文件《聯邦自動駕駛政策:加速道路安全變革》(簡稱AV1.0),針對近年來自動駕駛技術快速發展的需求,提出了聯邦政府關于促進自動駕駛技術發展的國家戰略,確立了聯邦政府關于自動駕駛技術發展和監管的政策框架。AV1.0 從自動化汽車技術性能指南、聯邦政府及州政府監管職能定位、國家公路交通安全管理局現行監管措施、新的監管舉措及管理機構4方面,闡述了聯邦政府關于構建、促進自動駕駛技術產業發展和監管機制的政策指南。AV1.0明確了研發機構和生產企業在設計、開發和生產自動駕駛汽車時必須滿足的15個性能指標;確保了聯邦政府和州政府對自動駕駛汽車監管措施的一致性;更新了監管手段和工具,對新技術在政策范圍內給予例外處置(如對不滿足《聯邦機動車安全標準》(FVMSS)的車型進行豁免),同時加強評估與認證措施。《聯邦自動駕駛政策:加速道路安全變革》闡述了美國智能網聯汽車準入管理中采用的“強制&限定準入管理”政策思路。
2017 年9 月,美國交通部再次發布《自動駕駛系統2.0:安全愿景》(簡稱AV2.0),考慮到技術的發展進步,AV2.0 首次創造性的提出了一種非強制性監管的自動駕駛車輛管理策略,即為行業提供了一個靈活的指導性框架,這也是AV2.0 和AV1.0 最重要的不同之處。《自動駕駛系統2.0:安全愿景》取代了《聯邦自動駕駛政策:加速道路安全變革》,AV2.0 政策框架為安全部署自動駕駛車輛提供了全新的思路,即鼓勵制造商開發更安全的車輛、提高了監管的靈活性、更加支持行業創新。AV2.0 政策框架包含2 個部分,第1 部分為非強制性引導,包含12項優先考慮的安全設計要素(包括系統安全、設計適用范圍(ODD)、目標和意外的檢測與響應(OEDR)、最小風險方案、測試方法、人機交互界面、網絡安全、耐撞性、碰撞后行為、數據記錄、消費者教育與培訓),指導生產企業在自動駕駛汽車(針對的是SAE L3~L5 等級的高級別自動駕駛車輛)設計中要考慮的安全要素,并設計自我記錄程序來評估、測試和驗證各種安全要素。隨著自動駕駛技術的快速發展,生產企業考慮安全設計要素的方法無法用單一標準衡量,生產企業在降低相關安全風險時,可以自由地進行創新;第2部分為對各州的技術援助,包含再次明確聯邦和各州的職能、職責和角色定位、最佳法律實踐和國家公路安全官方的最佳實踐。《自動駕駛系統2.0:安全愿景》闡述了美國智能網聯汽車準入管理中采用的“引導&開放準入管理”政策思路。
2018年10月,美國交通部發布《準備迎接未來交通:自動駕駛汽車3.0》(簡稱AV3.0)。AV3.0 是美國交通部首次聯合各地面交通運營管理部門發布的、涵蓋地面交通系統多種運輸模式自動化技術的綜合性指導文件,包含來自整車企業、設計企業、基礎設施企業、運營者、商用車運營企業、交通運輸行業及州和地方政府的全面反饋,并在AV2.0的基礎上進一步放寬對自動駕駛技術的發展限制,提出聯邦政府對自動駕駛發展的6項基本原則,即牢守安全底線、繼續保持技術中立、開展政策迭代、營造一致性的監管環境、為自動駕駛進行積極準備和保護提供自由。《準備迎接未來交通:自動駕駛汽車3.0》闡述了美國智能網聯汽車準入管理采用的“上下游&橫縱向一體化”政策思路。
2020 年1 月,美國交通部發布《確保美國自動駕駛汽車技術的領導地位:自動駕駛汽車4.0》(簡稱AV4.0),其核心思想是通過統一的協作,全力推動自動駕駛的發展,確保美國的領先地位。AV4.0 是對AV2.0和AV3.0中為企業和管理部門利益相關方提供指導的補充。AV4.0 主要的成就包括統一了38 個聯邦部門、獨立機構、委員會和總統執行辦公室在自動駕駛汽車領域的共識、建立了現代化的監管環境、首次批準了自動駕駛系統相關的臨時豁免、向美國7個州的8個示范試點提供聯邦補助金。AV4.0使得美國智能網聯汽車準入管理進入實質性區域道路示范階段。美國AV1.0到AV4.0的智能網聯汽車準入和監管策略演變過程見圖2。
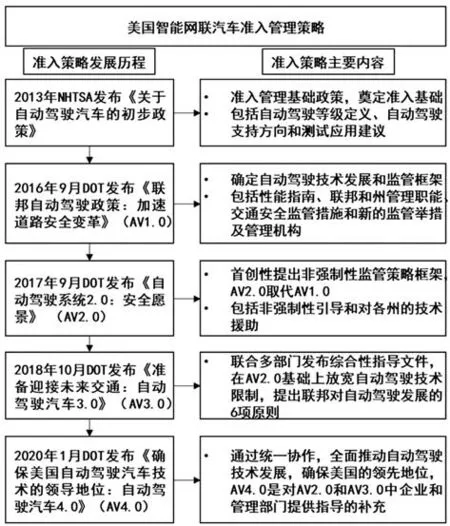
圖2 美國智能網聯汽車準入管理策略
3.2 德國智能網聯汽車準入管理策略
德國智能網聯汽車準入管理遵循的法律法規主要有《歐盟自動駕駛車輛許可豁免流程指南》、《維也納道路交通公約》、《道路交通法修訂案》和《自動化和網聯化車輛交通倫理準則》。
2020 年8 月,歐盟發布的《歐盟自動駕駛車輛許可豁免流程指南》(簡稱《豁免指南》),為自動駕駛車輛準入提供了路徑,德國遵從《豁免指南》。針對相關L3 和L4 級自動駕駛汽車測試,《豁免指南》規定了具體的豁免流程。申請豁免的自動駕駛汽車需要滿足安全要求(包括自動駕駛性能、人機交互、駕駛任務交接、黑匣子安裝、網絡安全)以及型式批準機構的安全評估和測試要求。
德國的車輛測試和量產車輛上路均遵從最新修訂的《國際道路交通公約(維也納)》和《道路交通法修訂案》。德國作為聯合國《維也納道路交通公約》的締約國,自動駕駛受到公約的約束,2016 年3 月聯合國對公約第8 條進行修正,修訂了對人類駕駛員的駕駛職責要求,只要自動駕駛技術“可以被駕駛員權限覆蓋或接管”,允許將車輛駕駛職責交給自動駕駛技術。《道路交通法修訂案》允許自動駕駛車輛上路,適用于測試及量產車輛,允許自動駕駛系統在特定條件下替代人類駕駛員,只要車輛獲得官方認證或歐盟EC型式認證,即可獲得車輛牌照,該修訂案并未限定自動駕駛車輛的行使范圍,獲牌照自動駕駛車輛可在德國全境道路上行駛。
為厘清自動駕駛系統設計責任、過失責任做好鋪墊,2017年6月,德國內閣通過了《自動化和網聯化車輛交通倫理準則》,成為世界第一部針對自動駕駛的倫理準則,明確了自動駕駛系統要永遠保證比人類駕駛員造成事故少、人類的安全必須始終優于動物或其它財產等20條準則,德國智能網聯汽車準入管理策略演變見圖3。
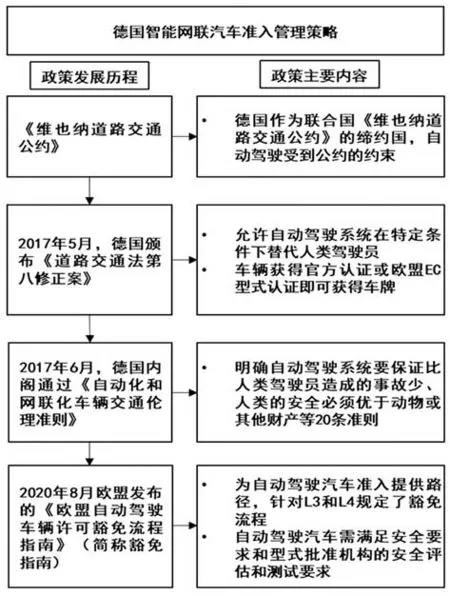
圖3 德國智能網聯汽車準入管理策略
2021 年12 月,德國聯邦汽車運輸管理局(KBA)批準了奔馳S 級的L3 自動駕駛系統,意味著奔馳L3級自動駕駛能夠上路行駛。其應用場景是在德國130 00 km的高速公路上,如遇到擁堵路段,車輛可以完全接管所有駕駛動作,并且最高以60 km/h 的速度行駛。這側面反映了盡管通過德國相關法律法規限制即可上路行駛,但從安全角度出發,德國在智能網聯汽車準入管理應用中仍然保持謹慎。
3.3 日本智能網聯汽車準入管理策略
日本智能網聯汽車準入遵循的法律法規主要有《自動駕駛汽車道路測試指南》、《遠程自動駕駛系統道路測試許可處理基準》、《自動駕駛汽車安全技術指南》和《道路交通法》修正案。通過4 部法律法規約束與監管,日本智能網聯汽車進入實際道路運營發展階段。
2016 年5 月,日本警察廳發布《自動駕駛汽車道路測試指南》,明確規定駕駛人應當坐在駕駛位上,測試車輛和駕駛人應符合并遵守現行法律法規。《自動駕駛汽車道路測試指南》從測試機構、駕駛員和車輛技術提出明確要求,其中對測試機構的主要要求包括分階段測試(封閉→半開放→開放)策略、安全保障措施、駕駛員培訓、保險投保、制定合理測試計劃、交通事故處置要求;對駕駛員的主要要求包括駕駛執照資格、熟悉自動駕駛系統、始終坐在駕駛位、特定路況下的脫手要求;對車輛技術的主要要求包括符合《道路運輸車輛安保基準》規定、在試驗場內開展充分的測試、車身張貼測試標簽、車輛安裝信息和數據記錄裝置、車輛發生故障時的駕駛接管、車輛駕駛模式切換提示音、車輛網絡安全保障措施和在線升級狀態要求。《自動駕駛汽車道路測試指南》為日本智能網聯汽車準入管理奠定了基礎。
2017年6月,日本警察廳為推動遠程自動駕駛系統實用化技術的開發,頒布了《遠程自動駕駛系統道路測試許可處理基準》,將遠程監控員定位為遠程存在、承擔現行道路交通法規上規定義務和責任的駕駛人。該政策允許汽車在無人駕駛狀態下進行相應測試。《遠程自動駕駛系統道路測試許可處理基準》作為《自動駕駛汽車道路測試指南》的補充,從無人駕駛車輛測試的審查標準和許可實施條件2 方面進行了約束,其中審查標準主要包括對測試機構提交的測試方案審查、安全措施審查、車輛符合《道路運輸車輛安保基準》、遠程監控員資質和操作規范;許可實施條件主要包括嚴控限定測試場所和時間、遠程監控員駕照放置位置、車輛被監管狀態、事故處置要求。
2018 年9 月,日本國土交通省發布《自動駕駛汽車安全技術指南》,該政策的落地表征日本智能網聯汽車準入進入到實質落地前期階段,明確了L3 級和L4 級自動駕駛汽車必須要滿足的技術條件。指南從10 個方面對智能網聯汽車生產企業及產品做出強制性要求,分別為明確設計運行范圍、自動駕駛系統的安全性、遵守安保標準、人機界面、打造數據記錄裝置、網絡安全、用于無人駕駛移動服務的車輛安全性、安全性評價、確保使用過程安全和向自動駕駛汽車使用者提供信息。
2019年3月,日本內閣發布《道路運輸車輛法》修正案和《道路交通法》修正案,《道路車輛運輸法》修正案對自動駕駛汽車使用攝像頭、傳感器和監管設備提出要求,同時對自動駕駛系統的測試和維修提出要求;《道路交通法》修正案正式允許L3 級自動駕駛車輛上路行駛,該法案于2020 年4 月起實施。日本智能網聯汽車準入管理策略的演變見圖4。
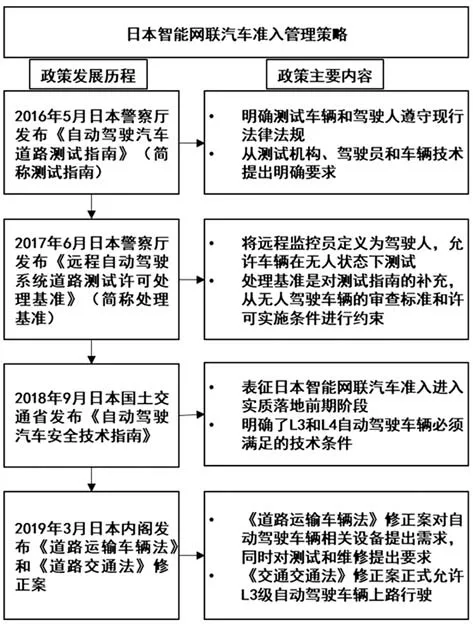
圖4 日本智能網聯汽車準入管理策略
2020 年11 月,日本國土交通省(MLIT)通過本田Legend L3 級自動駕駛審查,本田Legend 成為全球首款合法上路的L3 級自動駕駛車輛。該自動駕駛系統使用條件是在高速公路遭遇擁堵時,車速降低到30 km/h 以下時自動駕駛系統啟動,自動控制轉向盤和速度,并負責停車和啟動。
4 發達國家智能網聯汽車準入管理策略對比
通過對發達國家智能網聯汽車準入管理策略的對比,可以得知不同國家在智能網聯汽車準入管理策略上的主要思路和差異有5點:
(1)政策迭代性,這體現了智能網聯汽車準入不同于傳統和新能源汽車準入模式,智能網聯汽車準入管理政策需要不斷迭代;
(2)準入認證機制,體現了在準入管理中國家和企業的角色定位和主導權;
(3)準入要求,這體現了國家對智能網聯汽車準入的條件符合性要求;
(4)準入車型,這體現了國家對智能網聯汽車準入范圍的把控;
(5)準入使用條件,這體現了國家對智能網聯汽車準入后上路行駛條件的限制。
從對比看,美國促進智能網聯汽車的發展積極性更高,在準入管理中采用了引導和自我認證的機制,旨在獲得生產研發企業和政府在智能網聯汽車發展中的最佳實踐,而德國智能網聯汽車準入管理策略相對謹慎,日本智能網聯汽車準入管理策略則相對保守。目前從工業和信息化部發布的政策意見看,我國智能網聯汽車生產企業及產品準入管理具體策略尚未成型,需要進一步明確準入管理具體策略和要求。
我國智能網聯汽車生產企業及產品準入管理政策總體滯后于發達國家,其主要原因包括3 個方面:
(1)智能網聯汽車技術和標準體系不成熟,無法通過系統的技術審查要求對智能網聯汽車做準入管理;
(2)產業發展對準入需求不高,截止目前,國內整車企業的智能網聯汽車自動駕駛功能集中在L2級及以下,對高級別自動駕駛準入需求不高;
(3)國外智能網聯汽車準入管理策略借鑒性不強,盡管國外較早的頒布了智能網聯汽車準入管理政策,但具體的自動駕駛汽車上路行駛實踐案例較少,對我國智能網聯汽車準入管理借鑒意義不強。
我國針對高級別自動駕駛汽車準入管理總體保持謹慎,用以保證汽車行駛安全,我國與發達國家智能網聯汽車準入管理策略對比見表1。
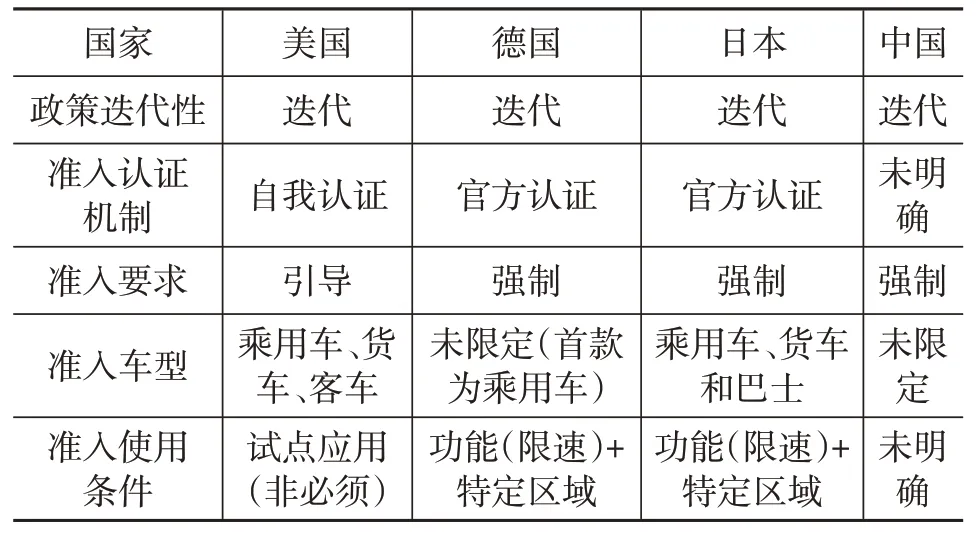
表1 發達國家智能網聯汽車準入管理策略對比
5 我國智能網聯汽車生產企業及產品準入管理策略建議
智能網聯汽車作為全新的汽車形態,其生產企業與產品準入管理完全不同于道路機動車輛以及新能源汽車生產企業和產品的準入管理模式,通過對發達國家智能網聯汽車生產企業及產品準入管理的深入剖析,根據中國智能網聯汽車產業發展需求,統籌安全與發展,提出以下政策建議。
(1)智能網聯汽車生產企業及產品準入管理政策保持“動態準入”。智能網聯汽車技術處于快速發展期,當前無法用固定的能力框架和技術指標來固化準入門檻和要求。建議政策制定者充分考慮智能網聯汽車準入管理的迭代性,適時更新、按需補充,實現“動態準入”管理模式。
(2)“強制+引導”準入管理策略既保證安全紅線,又支持安全與技術創新。完全強制性準入管理與完全引導性準入管理不適合中國智能網聯汽車的創新與安全,“強制”的范圍主要是形成行業共識的基礎要求,要求企業和產品必須滿足這些基礎要求,同時完成相應技術審查和檢測認證;“引導”的范圍是未形成行業共識或未明確的要求,鼓勵企業進行創新,不斷夯實提升安全基線。“強制+引導”需要雙管齊下,“強制”保安全底線,“引導”促行業發展。
(3)“帶條件準入”是保證智能網聯汽車大規模應用前的基礎保障。考慮到智能網聯汽車技術成熟度與安全性,智能網聯汽車的準入屬于“帶條件準入”,即通過一系列使用條件限制將智能網聯汽車限定在特定的時空下(試點應用)運行,逐步積累相關經驗、完善和優化相關體系與技術,形成從“點”到“面”的發展格局。
(4)“限制使用方”以保證智能網聯汽車實際應用中的可控管理。考慮到自動駕駛屬于全新的技術,在使用前需要對駕駛者進行全面的培訓,同時為了方便管理實際應用中的自動駕駛車輛,建議在試點應用中限定使用方(如出行企業、出租車企業、整車企業等),以保證自動駕駛車輛在實際運營和使用中的可控管理。
猜你喜歡
今日農業(2022年15期)2022-09-20 06:56:20
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
雜文月刊(2016年1期)2016-02-11 10:35:51
Coco薇(2015年1期)2015-08-13 02:23:50
現代企業(2015年8期)2015-02-28 18:54:47
決策探索(2014年21期)2014-11-25 12:29:50
現代企業文化·綜合版(2011年6期)2011-06-24 05:30:44
玩具(2009年10期)2009-11-04 02:33:14
個人電腦(2009年9期)2009-09-14 03:18:46
