基于神經-肌肉架構的仿生并聯軀干柔順控制
2022-07-25 12:02:34朱雅光朱建偉李茹月宋志鵬
中國機械工程 2022年13期
朱雅光 朱建偉 李茹月 宋志鵬
長安大學道路施工技術與裝備教育部重點實驗室,西安,710064
0 引言
在過去十年間,仿生機器人在機械結構、控制方法、能耗特性、穩定性與協調性等方面的研究都有了長足的進展。現有的仿生機器人大都可在復雜地形上實現步態切換和穩定運動,但很少有機器人具有動物般的靈活性、柔順性和快速響應性。生物學研究表明,生物軀干的彎曲和伸展可以增大動物奔跑的步幅[1],儲存和釋放能量,抵抗外界沖擊,減少高速運動步態時的能耗[2]。SCHILLING[3]發現老鼠和兔子通過調整軀干姿態來改變四肢著地的角度和位置,使整體質心軌跡始終保持平穩,軀干的主動作用提高了鼠和兔的運動穩定性。DENG等[4]、BERTRAM等[5]通過觀察獵豹的運動模式發現,獵豹在高速奔跑時,它的軀干可隨四肢的周期性運動有節奏地伸展和彎曲以增大步幅。生物軀干的靈活性和協調性有益于提高動物運動速度。為使仿生機器人具有動物一般優良的運動特性,許多學者和研究人員對仿生軀干做了大量研究。CheetahRobot的運動速度可達45 km/h,其極限運動性能甚至可以和一些動物相媲美[6-8]。
鑒于此,本文將六自由度并聯平臺作為仿生軀干,并對仿生軀干的柔順控制進行研究。這種并聯機構與動物軀干構型[9]類似,具有多個自由度,還具有類似獵豹、馬等動物軀干的靈活性、柔順性和快速響應性。到目前為止,對并聯機構控制方法的研究大多都集中在基于動力學模型的控制[10]、冗余驅動控制[11-12]和軌跡跟蹤控制[13]。軀干實現柔性的方法有彈性元件被動柔順[14-15]、主動驅動柔順控制[16-17]。剛度可調的被動柔性軀干穩定、能效高,但速度變化或其他特殊情況時的剛度調節有困難。剛度調節不合適時,容易出現失穩現象。主動驅動型軀干可有效提高仿生機器人的運動速度,但由于軀干輸出是預先規劃好的,缺乏與外界環境的交互,因此不具備動物軀干的優點。主動柔順控制可使仿生軀干模擬動物軀干、實現柔順運動,因此,本文對仿生并聯軀干的主動驅動柔順控制進行研究。
本文針對仿生并聯軀干[9]提出了一種基于神經肌肉控制架構的柔順控制方法,將6個σ-Hopf非線性振蕩器[18-19]作為中樞模式發生器,進而構成仿生并聯軀干的神經控制網絡。中樞模式發生器產生的節律信號經處理后,發送到電機從而控制6條支鏈協調運動。受動物肌肉模型[20]啟發,本文在并聯軀干輸出關節的兩側構建了一對虛擬的主動肌-拮抗肌模型,在確保并聯軀干快速響應的前提下,通過調節參數獲得肌肉模型的剛度系數和阻尼系數。仿生肌肉控制方法將外負載轉換為關節轉角來驅動仿生軀干進行順應運動。初始位姿給定時,并聯平臺在外力作用下的位姿變化可用來驗證該方法有效性。
1 仿生并聯軀干概述
1.1 結構概述
如圖1所示,并聯軀干由動平臺、靜平臺和6個完全相同的支鏈構成。靜平臺和動平臺通過支鏈連接,每條支鏈由2個球鉸、1個連桿、1個搖桿、1個力傳感器、1個電機組成。電機的額定電壓為24 V,轉矩常數為11.8 mN·m/A,轉速常數為809 (r/min)/V,內置23∶1的行星減速器。6個直流伺服電機分成3組均布在靜平臺上,每組間隔120°。電機與靜平面通過夾角為60°的連接件連接。支鏈中串聯的力傳感器實時采集連桿的受力信息。動平臺中心安裝有檢測動平臺姿態的傳感器。并聯軀干的運動是通過搖桿繞電機輸出軸旋轉帶動連桿運動實現的。
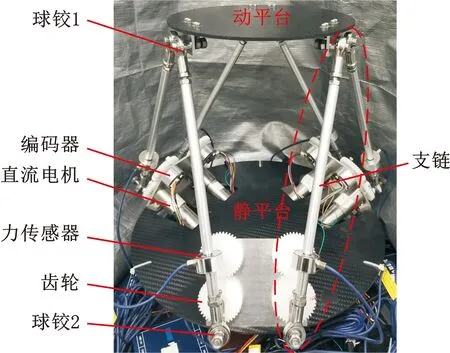
圖1 仿生并聯軀干的機械結構Fig.1 Mechanical structure of bionic parallel torso
1.2 運動學分析
仿生并聯軀干的幾何構型如圖2所示,6臺電機分為3組(1-6、2-3、4-5),靜平臺、動平臺的坐標系分別用{B}和{P}表示,坐標系的原點分別為OB和OP,{B}和{P}的Z軸垂直于平臺。SP,i和SB,i分別為連桿兩端的2個球鉸中心,RB,i為電機軸線與搖桿中心線的交點,下標i表示第i條鏈,其他的結構參數如表1所示。動平臺繞X軸的翻滾角為ψ,繞Y軸的俯仰角為θ,繞Z軸的偏航角為φ。
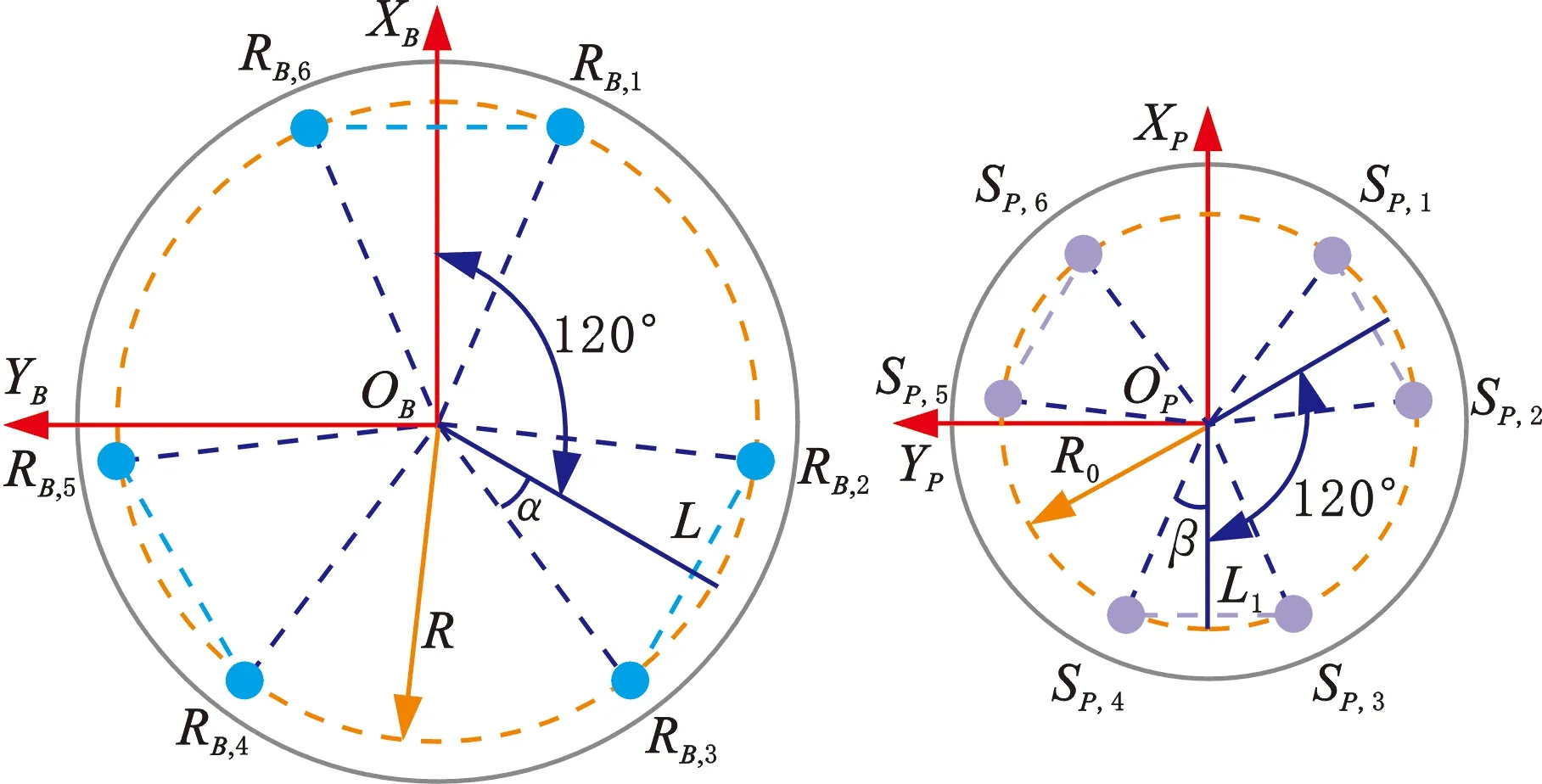
(a)靜平臺俯視圖 (b)動平臺俯視圖
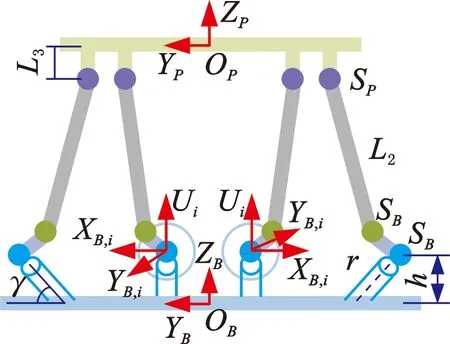
(c)仿生并聯軀干側視圖圖2 仿生并聯軀干的幾何構型Fig.2 Geometrical configuration of bionic parallel
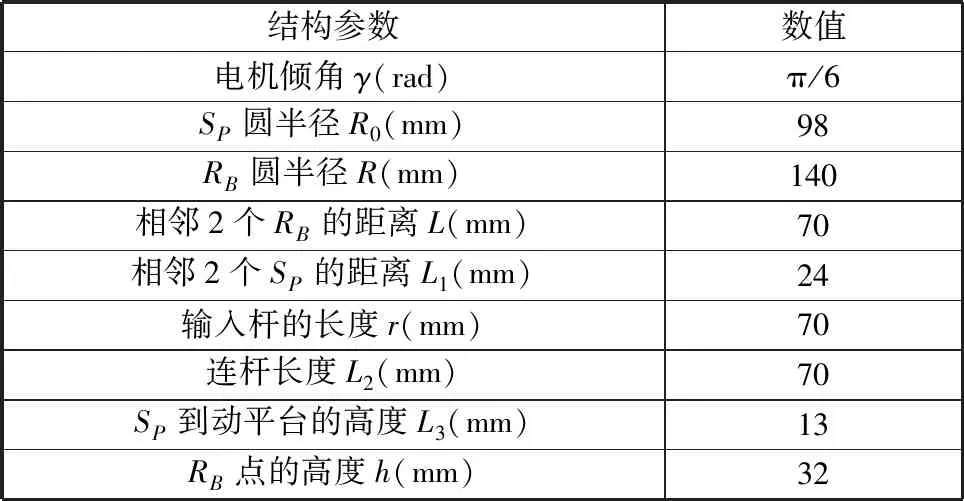
表1 結構參數
如果已知動平臺在{B}坐標系下的位置(x,y,z)和姿態(φ,θ,ψ),那么{B}坐標系下的向量OBSP,i為

對于{B}坐標系,電機輸出軸軸線的方向向量Ui=(hcosζ/tanγ,hsinζ/tanγ,h),其中,ζ為電機在靜平臺平面的投影與XB軸的夾角,ζ∈{0,-2π/3,-2π/3,-4π/3,-4π/3,0}。在電機輸出軸與搖桿軸線的交點建立新的坐標系,該坐標系X向的方向向量為
Y軸方向的方向向量為
Z軸方向的方向向量為
ZB=(0,0,1)
搖桿矢量RB,iSB,i=r(XB,icosθi+YB,isinθi),支鏈矢量RB,iSP,i=OBSP,i-OBRB,i,連桿矢量SB,iSP,i為支鏈與搖桿的矢量差即SB,iSP,i=RB,iSP,i-RB,iSB,i。根據余弦定理可得點SP,i到SB,i的距離:
|SB,iSP,i|=L2=
(2)

Λi+2RB,iSP,i·r(XB,icosθi+YB,isinθi)=0
(3)
將χ=tan(θi/2)代入式(3)可得
χ2(Λi-2rXB,i·SB,iSP,i)+χ(4rYB,i·SB,iSP,i)+
2rXB,i·SB,iSP,i+Λi=0
(4)
式(4)為χ的一元二次方程,通過解算式(4),得到電機i的轉角θi=2arctanχ。

(5)
(6)
最后,應用牛頓-拉夫遜求解方法[21],求解出動平臺的位置和姿態。
1.3 運動空間
分析并聯機構的運動空間得到并聯機構的俯仰角θ∈[-12°,18°]、翻滾角ψ∈[-12°,12°]、偏航角φ∈[-40°,40°]。并聯機構的可達姿態與馬和貓軀干彎曲、翻滾、扭轉可達的角度相近,因此可用于模仿軀干的彎曲、側轉、扭轉。同時,并聯機構的運動空間比馬在3種步態(慢跑、小跑、行走)下運動時軀干的運動空間都要大。這說明本文設計的仿生并聯機構的運動空間可以與馬和貓在任意運動模式下軀干的運動空間相媲美。
2 控制架構
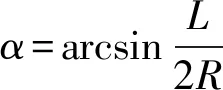
整個仿生并聯軀干的控制架構如圖3所示。先生成軀干的運動軌跡,由運動軌跡決定的位姿(xd,yd,zd,φd,θd,ψd)經逆運動學運算可求解出電機i(i=1,2,…,6)的關節轉角qi。將qi作為角度指令發送給電機,動平臺即可運動到期望的位姿狀態。僅由逆運動學解算的電機角度控制的軀干不具備柔順性,因為軀干關節會保持在期望位置且不因外負載干擾而改變。軀干受到外力沖擊時,構件極易損壞。為避免沖擊損壞機構,引入順應性姿態控制模塊使并聯軀干在外力作用下產生柔順運動。肌肉控制模型(muscle control model,MCM)根據力傳感器反饋的力Fs可計算得到偏置角qvj(j=1,2,…,6)。逆運動學所求關節角與肌肉控制模型求解的肌肉緩沖偏置角之和為電機實際的轉角,即并聯軀干在外力作用下達到軌跡期望的位姿后,軀干關節還需轉過偏置角qvj來模擬肌肉伸縮,使支鏈具備一定的緩沖性能。因此,將q=qi+qvj作為電機的最終輸出角度。下面介紹圖3中每個模塊的具體功能。
2.1 神經運動控制網絡模塊
為實現類哺乳動物的仿生運動軌跡,構建圖4所示的神經運動控制網絡,通過反向控制策略[18,22]實現類動物的節律性運動行為。σ-Hopf非線性振蕩器構成中樞模式發生器(CPG)單元;6個CPG耦合形成的神經運動控制網絡生成6個關節的節律信號,節律信號經信號耦合模塊后用于軌跡規劃。位姿軌跡根據動物行為設計,期望關節轉角由逆運動學計算得到,最終用來驅動電機轉動。耦合σ-Hopf非線性振蕩器的數學表達式為
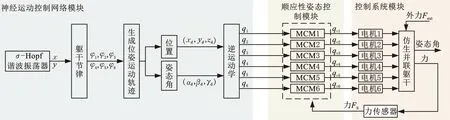
圖3 仿生并聯軀干控制架構Fig.3 Bionic parallel torso control architecture
(7)
(8)

參數η決定了上升階段和下降階段之間的轉換速度,由式(7)、式(8)可以發現T和ρ是不相關的,這意味著運動周期不會受到占空比變化的影響。

圖4 并聯軀干的神經運動控制網絡Fig.4 Neural motor control network of parallel trunk
2.2 順應性肌肉控制模塊
MCM在順應性姿態控制中起重要作用。單支鏈的虛擬肌肉模型布置如圖5所示。定義輸入桿轉動所在平面為投影面A,將輸入桿繞RB,i點旋轉一周形成的圓等效為1個虛擬轉動關節,然后假想虛擬轉動關節兩端有虛擬的拮抗肌肉M1和M2(產生的虛擬肌肉力分別為FT1和FT2)拉動關節轉動。M1和M2分別由平行成分(parallel elements,PE)和收縮成分(contractile elements,CE)組成,PE產生被動力FP,CE產生主動力FC。通過肌肉剛度阻尼系統對每個PE進行建模,由PE產生的被動力為
FP=K(lP-l0)+D(vP-v0)
(9)
其中,K、D分別為肌肉的剛度系數和阻尼系數,為簡化被動力的求解過程,假定剛度系數和阻尼系數相等,即K1=K2=K,D1=D2=D;lP、l0分別為PE的長度和初始長度;vP、v0分別為PE的速度和初始速度。
圖5 肌肉控制模型Fig.5 Muscle control model
主動力由激活系數α和虛擬肌肉長度與速度的關系表達函數F(lC,vC)共同決定[23],其中,lC、vC分別為CE的長度和速度,那么CE產生的主動力為
FC=αF(lC,vC)
(10)
FT1、FT2均為被動力和主動力之和,即
FT1=K(lP1-l0)+DvP1+α1F(lC1,vC1)
(11)
FT2=K(lP2-l0)+DvP2+α2F(lC2,vC2)
(12)
如圖5所示,支鏈中的連桿可以看作是一根任意截面受力大小相等的二力桿。轉動關節在外力Fext的作用下有順時針轉動的趨勢,因此,肌肉控制模型中的虛擬肌肉M1有阻止轉動關節轉動即伸長的趨勢,產生力FT1;虛擬肌肉M2與M1相反,有收縮的趨勢,產生力FT2。FT1和FT2繞轉動關節圓心P的力矩方向分別為逆時針和順時針。為了方便計算Fext繞P點的力矩,定義λi=?i×Ui為連桿力Fext與其投影所在平面的法向量,其中,?i為連桿受力方向的單位向量。定義ni=Ui×λi為Fext在平面A中的投影向量。Fext和投影面A的夾角ζi、搖桿與Fext在平面A上的投影間的夾角δi分別為
(13)
Fext對轉動中心P的力矩為
τi(Fext)=Fext,ircosζi|sinδi|
(14)
式中,Fext,i為第i條連桿受力。
FT1和FT2的繞轉動中心P的轉矩分別為
τi(FT1)=-FT1r1
(15)
τi(FT2)=FT2r1
(16)
式中,r1為輸入桿的半徑。

(17)
將式(14)~式(16)代入式(17),可得
(18)
M1和M2是2塊完全相同的虛擬肌肉,一個在拉伸,表現為伸肌,另一個在縮短,表現為屈肌。我們假設每個虛擬肌肉中PE和CE的長度都為虛擬肌肉的長度,即L1=lP1=lC1,L2=lP2=lC2;M1和M2的伸長量和縮短量相等,即ΔL1=-ΔL2。假定ΔL和關節轉動角度θ的關系為
ΔL1=lP1-l0=θr=-ΔL2=-(lP2-l0)
(19)
虛擬肌肉的伸長和收縮速度為
(20)
設定PE的初始速度vP1=vP2=0,將式(19)、式(20)代入式(18),得到
(21)
(22)
3 仿真分析
穩定柔順的仿生軀干需在受到外界干擾(沿坐標軸的作用力和繞坐標軸的扭矩)時快速達到穩定狀態且無超調和大幅波動。仿生軀干在外力作用下的姿態和關節轉角可用來判斷是否能實現快速柔順的姿態控制。對整個仿生并聯軀干柔順特性的調節主要通過調整控制器參數來實現,比如式(22)中的肌肉剛度K和肌肉阻尼D。
3.1 肌肉剛度系數K和肌肉阻尼系數D
為明確各參數對系統特性的影響,先對肌肉控制數學模型(式(22))中的參數進行分析,對比不同參數下的仿生并聯軀干的快速響應性和柔順性,選擇最優的K和D。仿真采用的控制架構與圖3所示一致。結構參數如表1所示,初始位姿設定為(x,y,z,φ,θ,γ)=(0 m,0 m,0.27 m,0°,0°,0°)。
在D=5 N·s/m不變的情況下,增大K,動平臺的高度減小,如圖6所示。K=500 N/m時,動平臺高度變化量為0.86 mm;K=700 N/m時,動平臺高度降低了0.62 mm;K=1000 N/m時,動平臺降低了0.44 mm。K過大時,動平臺的高度幾乎不會有任何變化,這與無肌肉控制模型的并聯軀干相似,即動平臺的高度為初始高度,不具備柔順控制功能。K太小會使整個并聯軀干柔性太大,如圖6中的藍色虛線。并聯軀干還未受到負載(僅存在重力作用)作用時,動平臺的高度下降很大,這種現象對并聯軀干的負載性能有影響。考慮到K=700 N/m時動平臺的高度變化量遠小于豎直方向可達范圍的最大值60 mm,故本文初步選用700 N/m作為后續仿真和實驗的肌肉剛度系數。

圖6 K變化時動平臺的高度變化(D=5 N·s/m)Fig.6 The height variation of moving platform when K varies(D=5 N·s/m)
初步確定肌肉剛度后,調整肌肉阻尼D,以便獲得較短的動平臺響應時間。變化的D并不影響穩態值,而僅影響動平臺的響應速度和達到穩態的時間。增大D可以加快響應速度,但D增加到一定值后,達到穩定的時間會延長;D越小時,動平臺高度曲線會有超調并伴隨著小幅振蕩,且響應變慢,穩態時間變長。如圖7所示,K=700 N/m時,40 N·s/m、50 N·s/m、60 N·s/m對應的響應時間t分別為0.49 s、0.33 s和0.58 s。K=700 N/m,D=50 N·s/m時,動平臺的響應最快,故后續仿真和實驗的肌肉阻尼系數確定為50 N·s/m。

圖7 D變化時動平臺的高度變化(K=700 N/m)Fig.7 The height variation of moving platform when D varies(K=700 N/m)
3.2 并聯平臺受外力時的變化情況
向并聯軀干動平臺施加外力,觀察并聯機構驅動關節是否發生柔順運動,判斷神經肌肉控制方法是否能實現仿生并聯軀干的柔順控制。本文中所施加的外載荷分別為沿坐標軸的力和繞坐標軸的扭矩;同時,肌肉剛度K為700 N/m,肌肉阻尼D為50 N·s/m。
3.2.1施加沿Z軸的外力
動平臺受力情況如圖8所示。在動平臺圓心,施加沿{P}坐標系Z軸負方向的力F,如圖8a所示,然后觀察動平臺位置和姿態的變化。力的施加情況如下:0~5 s時F=0;5~13 s時F=25 N;13~21 s時F=45 N;21~25 s時F=0。
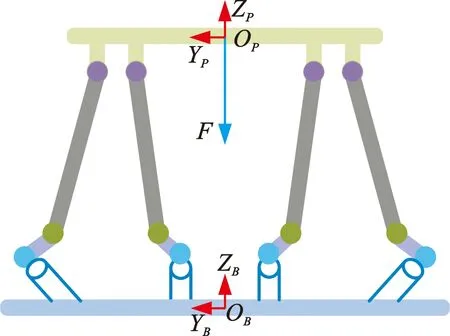
(a)施加沿Z軸的外力
(b)施加繞Y軸的扭矩圖8 動平臺受力情況Fig.8 Dynamics of moving platform
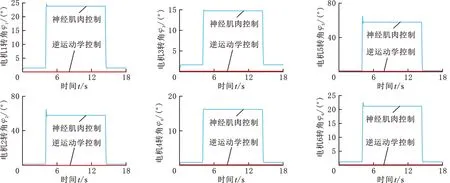
若并聯機構僅按照逆運動學求解的期望關節轉角運動,則外力作用時,6個電機的轉角始終保持在0°附近,如圖9所示。采用神經肌肉控制時,并聯機構在0~5 s間不受外力作用,6個電機在機構自重作用下偏轉2°。5 s時施加25 N的力,電機轉角增加至12°,用時0.2 s達到穩態;13 s時外力增大至45 N,電機轉角為20°,響應時長為0.2 s;21 s外力撤銷后,電機轉角均恢復到2°并保持不變。仿真結果表明受神經肌肉控制的并聯機構在Z方向的外力作用下產生了柔順運動。

圖9 在Z向外力作用下,并聯平臺的電機轉角變化Fig.9 The variation of motor rotation angle of parallel platform under Z direction external force
3.2.2施加繞Y軸的扭矩
圖8b中,與水平面夾角60°的力F1對動平臺的作用效果可等效為繞Y軸的扭矩M。扭矩的施加情況:0~4 s時M=0;第4 s時M=2 N·m,并保持10.4 s;第14.4 s時M=0。
如圖10所示。當并聯機構僅由逆運動學控制時,對動平臺施加扭矩作用,6個電機的轉角均為0°。采用神經肌肉控制方法控制并聯機構時,0~4 s的并聯機構不受外力作用,電機轉角均為2°。電機轉角變化的原因是動平臺和支鏈的總重力使肌肉模型受力,產生電機偏置角。在第4 s施加2 N·m扭矩時,動平臺的俯仰角β由0°增大到5°,對應的電機2、5轉過約58°,電機3、4轉過約15°,電機1、6轉過約21°,電機轉角曲線上升所需時間約為0.2 s;第14.4 s撤銷扭矩時,動平臺的姿態角和6個電機轉角返回初始轉角0°。仿真結果表明,由神經肌肉控制的并聯軀干在外界負載和干擾作用下具有一定的順應性。
4 實驗驗證分析
為驗證算法效果,在實驗環境下,施加沿Z軸的力和繞Y軸的扭矩,觀察動平臺位姿和電機轉角的變化,以及轉角曲線上升所需時間。本實驗利用NI控制板,通過LabView軟件進行編程,數據通過以太網發送給NI控制板,再傳送給驅動器;驅動器發送PWM波驅動直流伺服電機帶動支鏈和動平臺運動。支鏈上的力傳感器通過采集模塊與控制板卡相連。姿態傳感器安裝在動平臺上面,通過USB通信,姿態信息傳輸頻率為500 Hz。
4.1 施加沿Z軸的力
實驗過程中施加的力與仿真施加的力一致,所得實驗結果如圖11所示。設定動平臺的初始姿態為水平即ψ=θ=φ=0°。第I階段(0~5 s),僅重力作用,電機角度均在0°附近,搖桿也都保持水平。第Ⅱ階段(5~13 s),豎直向下的力F2=25 N,在神經肌肉控制下,6個電機轉角在大約0.5 s內從0°增加至12°并保持穩定,搖桿也隨電機轉過相同的角度。第Ⅲ階段(13~21 s),豎直向下的力F3=45 N,在神經肌肉控制下,6個電機的轉角在0.54 s內從12°增加至25°并保持穩定,同時搖桿也轉到對應角度。第Ⅳ階段(21~25 s)撤銷所有的力;在神經肌肉控制下,6個電機的轉角從25°減少至0°,動平臺回到初始位姿狀態,電機角度曲線下降所需時間約為0.9 s。逆運動學控制下的并聯機構在整個實驗過程中的電機轉角和搖桿位置始終不發生變化。
(a)電機轉角

(b)動平臺的姿態角圖10 在繞Y軸旋轉的扭矩下,并聯平臺的電機轉角和姿態變化Fig.10 The variation of motor rotation angle and attitude information of the parallel platform under the torque of rotation around Y-axis

(a)神經-肌肉控制的實驗過程 (b)逆運動學控制的實驗過程
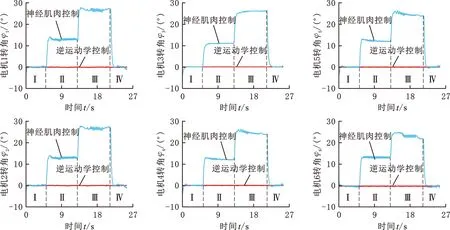
(c)電機角度變化情況圖11 在沿Z軸外力下,并聯軀干的柔順控制對比實驗Fig.11 Comparison experiment of compliance control of parallel trunk under external force along Z-axis
4.2 施加繞Y軸的扭矩
實驗過程中施加的扭矩M=2 N·m,所得實驗結果如圖12、圖13所示。設定動平臺的初始姿態為水平即ψ=θ=φ=0°。第I階段(0~4 s),僅重力作用,每個電機的轉角均在0°附近,每個搖桿均保持水平。第Ⅱ階段(4~14.4 s),施加的扭矩為2 N·m,神經肌肉控制下,動平臺的俯仰角θ在0.52 s內從0°增加至6.5°并保持穩態。電機1、4的轉角穩定在6°,電機2、3的轉角穩定在40°,電機5、6的轉角穩定在13°。第Ⅲ階段(14.4 s之后)撤銷扭矩;神經肌肉控制下,動平臺俯仰角θ在0.52 s內從6.5°減少至0°并保持穩定。逆運動學控制下的并聯機構在整個實驗過程中的姿態角和電機角度都不發生變化。
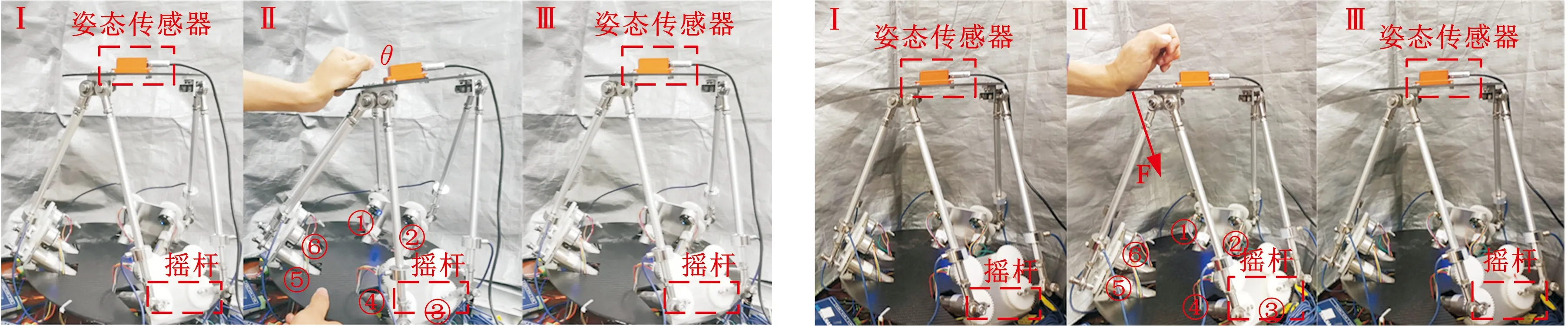
(a)神經-肌肉控制的實驗過程 (b)逆運動學控制的實驗過程圖12 在繞Y軸旋轉的扭矩下,并聯軀干的順應性姿態控制對比實驗過程Fig.12 Contrastive experimental process of compliance attitude control of parallel torso with torque around Y axis

(a)動平臺的姿態角
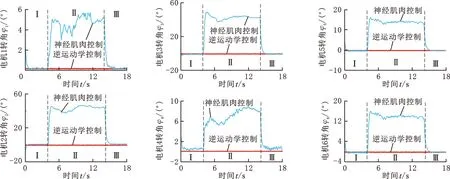
(b)電機角度變化情況圖13 在繞Y軸旋轉的扭矩下,并聯軀干的順應性姿態控制對比實驗結果曲線Fig.13 Contrastive experimental result curve of compliance attitude control of parallel torso with torque around Y-axis
5 結論
本文分析了仿生并聯軀干的正逆運動學,建立了仿生肌肉控制模型,提出了基于神經肌肉控制架構的仿生并聯軀干控制方法,在保證仿生并聯軀干快速響應的前提下,增強了其對外部沖擊的柔順性。通過仿真分析了肌肉控制模塊的柔順特性和響應特性,通過實驗驗證了所提控制策略的有效性和可實現性。依據仿生理念,神經運動控制網絡還可用于生成仿生軀干的不同運動模式。肌肉參數的調節與優化還能進一步提高仿生軀干的柔順運動性能。神經肌肉控制方法還可以與軌跡規劃方法、動力學控制等方法結合來進一步提高仿生軀干運動的柔順性和穩定性。后續我們將對肌肉剛度的自適應調節和仿生軀干的姿態閉環控制進行研究,搭建具有仿生并聯軀干的四足機器人,重點研究并聯軀干對機器人整體及運動性能的影響。