老人服務(wù)機(jī)器人機(jī)械臂控制系統(tǒng)架構(gòu)設(shè)計(jì)方法
2022-07-23 06:36:18常州工程職業(yè)技術(shù)學(xué)院郭發(fā)勇瑋中國(guó)科學(xué)院合肥物質(zhì)科學(xué)研究院先進(jìn)制造技術(shù)研究所趙江海
電子世界 2022年1期
常州工程職業(yè)技術(shù)學(xué)院 郭發(fā)勇 李 瑋中國(guó)科學(xué)院合肥物質(zhì)科學(xué)研究院先進(jìn)制造技術(shù)研究所 趙江海
為老人提供各種服務(wù)的機(jī)器人成為一種迫切的社會(huì)需求。為提升老人服務(wù)機(jī)器人控制系統(tǒng)性能,對(duì)軟件及硬件架構(gòu)進(jìn)行深層次分析,提出了一種包含三層控制系統(tǒng)架構(gòu)的設(shè)計(jì)方法,在現(xiàn)有機(jī)器人操作系統(tǒng)ROS的基礎(chǔ)上,向上拓展應(yīng)用技術(shù)開(kāi)發(fā),向下延伸底層硬件驅(qū)動(dòng)技術(shù)。將該方法應(yīng)用在一種新型老人服務(wù)機(jī)器人上,對(duì)老人服務(wù)機(jī)器人的機(jī)械臂系統(tǒng)開(kāi)展運(yùn)動(dòng)學(xué)分析,驗(yàn)證了該方法的有效性,實(shí)現(xiàn)了室內(nèi)物體抓取,可通用于一般的服務(wù)機(jī)器人。
我國(guó)是人口大國(guó),由于政策等原因使家庭老人的數(shù)量迅速增加,已經(jīng)成為世界上人口老齡化速度最快的國(guó)家之一,并且我國(guó)人口基數(shù)龐大,老齡化人口的絕對(duì)數(shù)龐大。第七次人口普查結(jié)果顯示中國(guó)超過(guò)60歲的老人將達(dá)到2.6億人,老齡化程度進(jìn)一步加深。因此,對(duì)于養(yǎng)老護(hù)理人員的需求極其旺盛,民政部官員表示,中國(guó)未來(lái)最少需要1000萬(wàn)名養(yǎng)老護(hù)理人員,這種巨大的需求將衍生出特殊的市場(chǎng)。老人服務(wù)機(jī)器人正是面向全民健康領(lǐng)域的國(guó)家重大需求,研發(fā)老人服務(wù)機(jī)器人具有重要的研究?jī)r(jià)值并將為社會(huì)帶來(lái)較大的經(jīng)濟(jì)、社會(huì)效益。
近年來(lái)國(guó)內(nèi)外眾多企業(yè)和科研機(jī)構(gòu)開(kāi)展老人服務(wù)機(jī)器人的研究工作,例如本田汽車公司研發(fā)的ASIMO機(jī)器人可以根據(jù)人類的聲音、手勢(shì)等指令做出相應(yīng)的動(dòng)作。國(guó)內(nèi)老人服務(wù)機(jī)器人也以突破環(huán)境識(shí)別、自主行走、任意抓取等多項(xiàng)關(guān)鍵技術(shù),可為老人提供多功能服務(wù)。日本SCHAFT公司的HRP-2型機(jī)器人、日本國(guó)家先進(jìn)工業(yè)技術(shù)研究院(AIST)的HRP-4C型機(jī)器人等也被用于研究。日本理化學(xué)研究所設(shè)計(jì)開(kāi)發(fā)的RIBA機(jī)器人系列輕柔的動(dòng)作可以將人類抱起或放下,或者是幫助其站立起來(lái)。
本文提出了一種新型老人服務(wù)機(jī)器人控制系統(tǒng)架構(gòu),以此為基礎(chǔ)開(kāi)發(fā)設(shè)計(jì)了一款老人服務(wù)機(jī)器人,開(kāi)展各項(xiàng)測(cè)試和實(shí)驗(yàn)工作,可抓取水杯、藥品,為老人提供各項(xiàng)服務(wù),實(shí)驗(yàn)結(jié)果驗(yàn)證了該架構(gòu)的有效性。
1 控制系統(tǒng)架構(gòu)設(shè)計(jì)(見(jiàn)圖1)
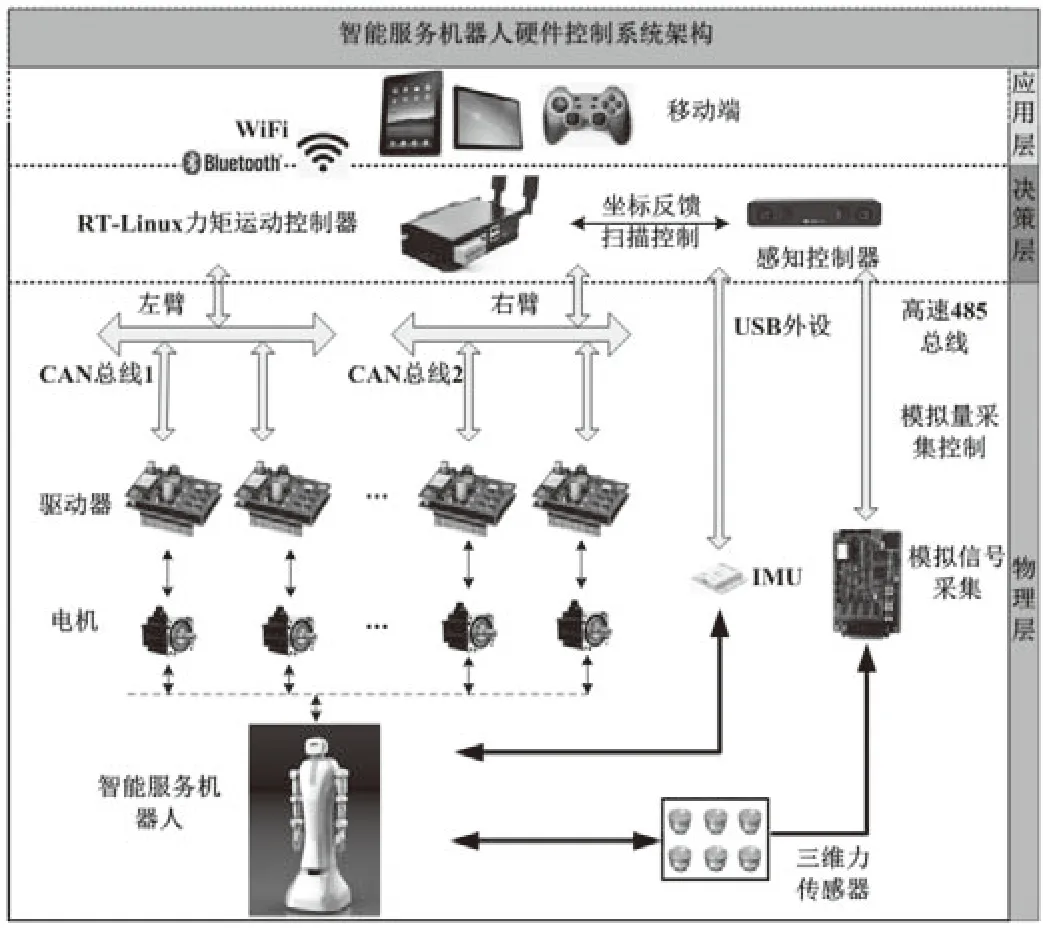
圖1 控制系統(tǒng)架構(gòu)設(shè)計(jì)
采用三層控制架構(gòu),整個(gè)系統(tǒng)分為3層,分別為會(huì)話層、決策層、物理層:
應(yīng)用層一般采用移動(dòng)終端,硬件可用嵌入式PC、安卓設(shè)備等,具備良好的可視化界面,可進(jìn)行系統(tǒng)參數(shù)配置通過(guò)有線/無(wú)線網(wǎng)絡(luò)控制機(jī)器人本體;終端上提供5-10Hz刷新頻率的系統(tǒng)狀態(tài)監(jiān)測(cè)功能,包括系統(tǒng)各個(gè)執(zhí)行部件、傳感器,可進(jìn)行機(jī)器人運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)仿真;提供任務(wù)編程腳本編輯、任務(wù)分解流圖等高級(jí)應(yīng)用,提供各類系統(tǒng)軟件API接口供給測(cè)試及二次開(kāi)發(fā)。
決策層包含運(yùn)動(dòng)控制單元和感知決策單元。運(yùn)動(dòng)控制單元主要包含機(jī)器人機(jī)械臂上核心算法計(jì)算和外圍通信處理,包括復(fù)雜動(dòng)力學(xué)迭代計(jì)算、雙臂協(xié)同軌跡規(guī)劃以及其他數(shù)值運(yùn)算,對(duì)決策層運(yùn)動(dòng)控制單元開(kāi)展軟件功能設(shè)計(jì),包括通信接口、核心算法及底層驅(qū)動(dòng)三個(gè)方面內(nèi)容,如圖2所示。感知決策單元核心器件為深度機(jī)器視覺(jué)傳感器,用于環(huán)境感知、SLAM語(yǔ)義地圖構(gòu)建、物體定位識(shí)別,為機(jī)械臂提供精確的物體位姿姿態(tài)信息。
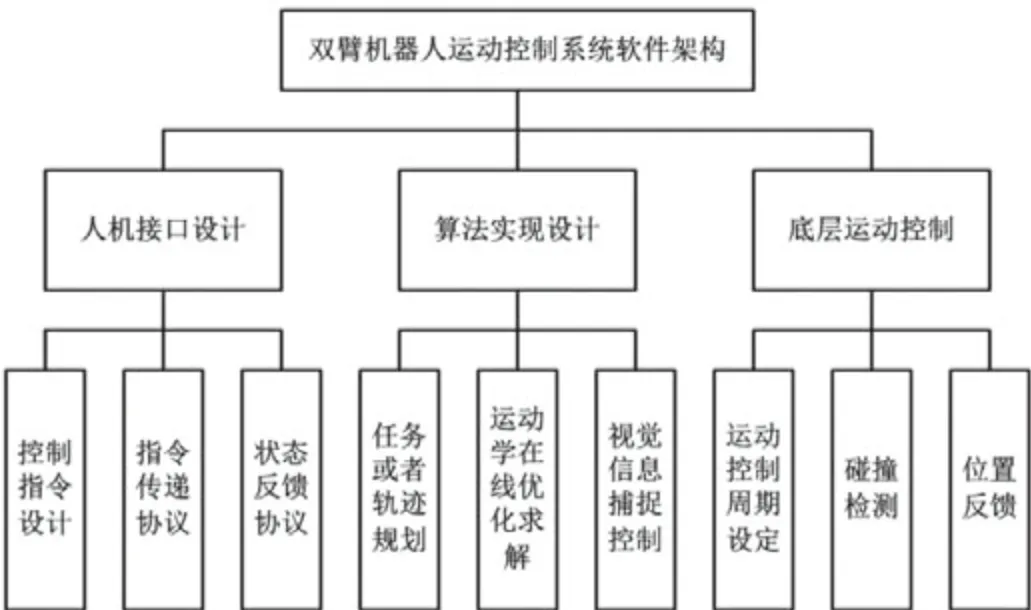
圖2 軟件功能設(shè)計(jì)
物理層包含執(zhí)行單元(電機(jī)、驅(qū)動(dòng)器、減速機(jī))、力傳感器和高速總線構(gòu)成。高速總線采用成本較低的CAN總線,搭載CANOpen CIA402運(yùn)動(dòng)控制協(xié)議,或者采用成本較高的Ethercat總線,搭載COE運(yùn)動(dòng)控制協(xié)議,實(shí)現(xiàn)2-10ms控制周期插補(bǔ)控制,可實(shí)時(shí)采集各個(gè)電機(jī)的位置、速度、加速度、溫度、力矩等數(shù)據(jù);電機(jī)、驅(qū)動(dòng)器采用小體積高功率密度器件;力矩傳感器包含安裝在手腕部和手指部,手腕部的傳感器可進(jìn)行分別用于變負(fù)載物體抓取和動(dòng)力學(xué)碰撞檢測(cè),安裝于手指部的壓力傳感器可模擬皮膚采集物體觸摸力。
系統(tǒng)軟件基于Linux操作系統(tǒng),采用開(kāi)源框架,其中系統(tǒng)內(nèi)部通信框架采用LCM/ROS系統(tǒng)組件,搭載Prempt-RT Linux實(shí)時(shí)核,利用Orocos開(kāi)源控制系統(tǒng)軟件進(jìn)行機(jī)械臂運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)計(jì)算,控制雙臂和底盤。
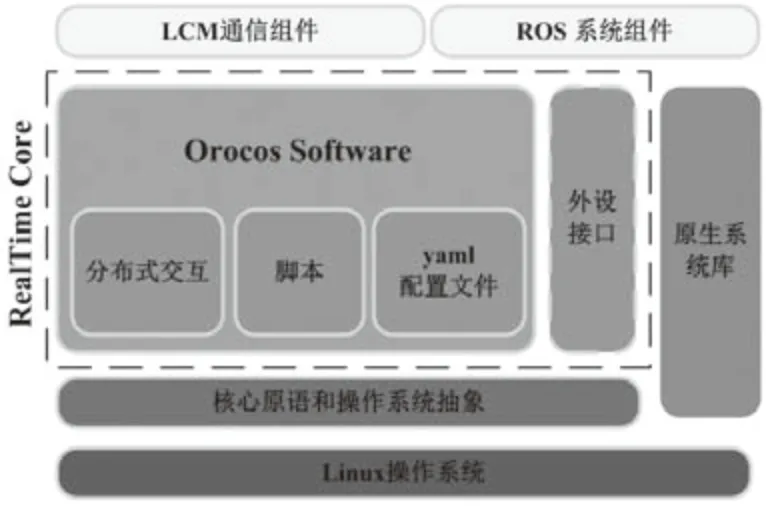
圖3 軟件系統(tǒng)架構(gòu)設(shè)計(jì)
2 機(jī)械臂模型分析
老人服務(wù)機(jī)械人機(jī)械臂的運(yùn)動(dòng)學(xué)模型建立的方法采用的是傳統(tǒng)的D-H方法,其D-H坐標(biāo)分布圖如圖4所示。
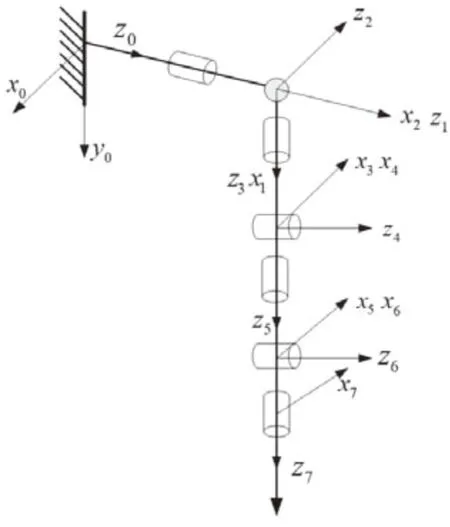
圖4 D-H機(jī)械臂連桿坐標(biāo)系
采用機(jī)器人工具箱對(duì)機(jī)械臂運(yùn)動(dòng)學(xué)模型開(kāi)展仿真研究,用于判斷機(jī)器人運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)算法是否可以有效執(zhí)行。本文采用MATLAB軟件的機(jī)器人工具箱Robotic Toolbox進(jìn)行老人服務(wù)機(jī)器人的正逆運(yùn)動(dòng)學(xué)和逆動(dòng)力學(xué)仿真,利用標(biāo)準(zhǔn)的MATLAB編程環(huán)境和控制器流圖仿真,模擬機(jī)器人連桿模型、軌跡運(yùn)動(dòng)規(guī)劃、障礙物碰撞檢測(cè)和機(jī)械臂物體抓取阻抗控制算法。修改了機(jī)器人工具箱的部分功能(僅能仿真單個(gè)機(jī)械臂),將其拓展為多機(jī)械臂仿真控制,如圖5所示,采用表1中的D-H參數(shù)建立與實(shí)際機(jī)器人本體參數(shù)一致的仿真模型。
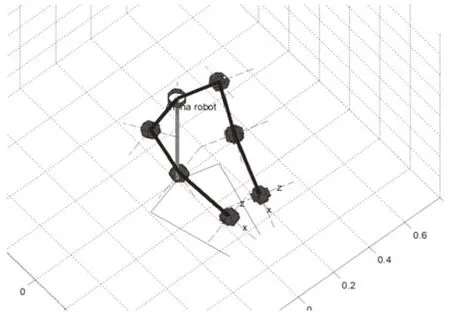
圖5 雙臂Matlab仿真
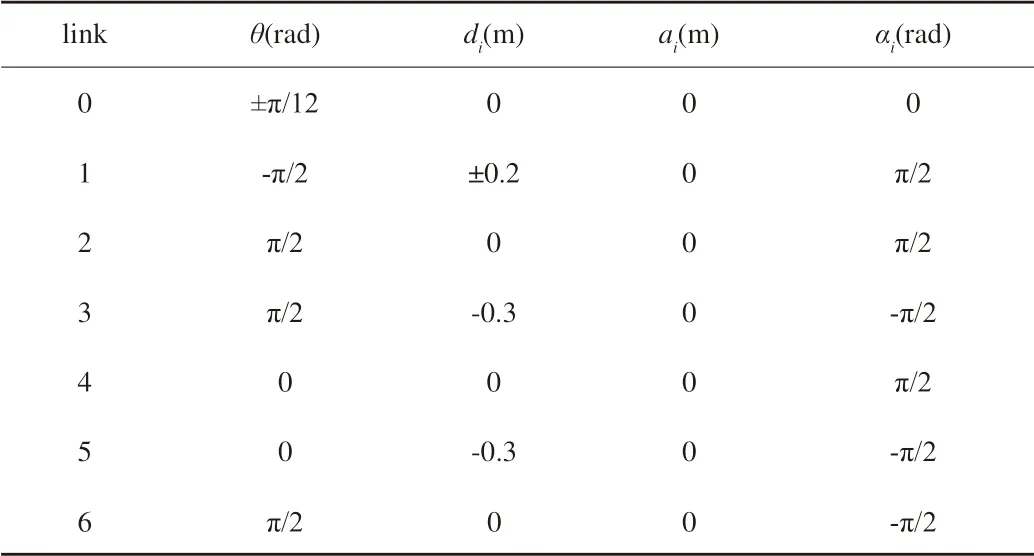
表1 機(jī)械臂D-H參數(shù)
逆運(yùn)動(dòng)學(xué)的求解有兩種常用方法,幾何解和數(shù)值解采用Newton-Raphson算法作為求解逆運(yùn)動(dòng)學(xué)方法。即是從當(dāng)前狀態(tài)的關(guān)節(jié)角減去一個(gè),考慮到位姿的微小變化量,矩陣J為雅克比矩陣,通過(guò)矩陣的逆運(yùn)算可以得到為:
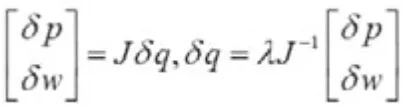
式中J —1為J的廣義逆解。通過(guò)循環(huán)求解關(guān)節(jié)角的修正量不斷縮小位姿誤差,其求解過(guò)程如圖6所示。該方法在MATLAB中較為容易實(shí)現(xiàn),但是考慮到實(shí)時(shí)數(shù)據(jù)通信和控制算法的需要,本文基于Moore-Penrose的對(duì)廣義逆的定義在雙臂機(jī)器人控制核心RT-Linux內(nèi)核中編寫求解矩陣的廣義逆解或偽逆的算法以提高實(shí)時(shí)性。
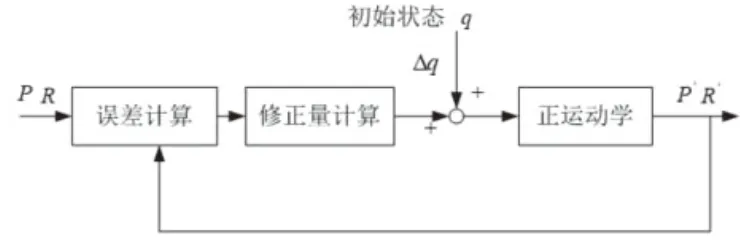
圖6 Newton-Raphson法求解逆運(yùn)動(dòng)學(xué)
3 機(jī)械臂抓取實(shí)驗(yàn)
根據(jù)本文設(shè)計(jì)的控制系統(tǒng)框架,開(kāi)發(fā)了一款老人服務(wù)機(jī)器人,該機(jī)器人利用頭部的Kinect體感攝像頭進(jìn)行環(huán)境識(shí)別和物體定位,實(shí)現(xiàn)機(jī)械臂指定位置的抓取,圖7所示。
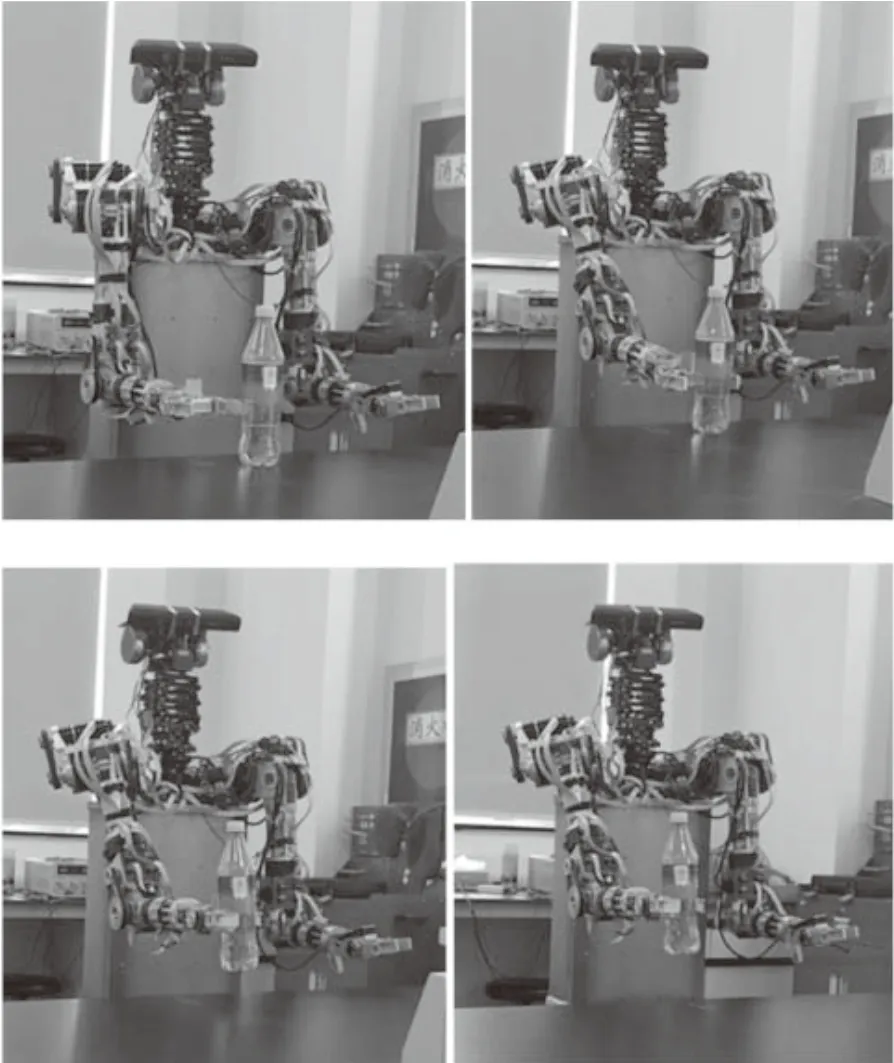
圖7 雙臂機(jī)器人物體抓取測(cè)試
本文提出了老人服務(wù)機(jī)器人三層架構(gòu)控制系統(tǒng)框架設(shè)計(jì)方法并對(duì)通用老人服務(wù)機(jī)器人的機(jī)械臂系統(tǒng)開(kāi)展運(yùn)動(dòng)學(xué)分析,將該方法應(yīng)用在一種新型老人服務(wù)機(jī)器人上,實(shí)現(xiàn)了室內(nèi)物體抓取,驗(yàn)證了該方法的有效性,具有一定的示范意義及通用拓展性。
猜你喜歡
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
商周刊(2017年9期)2017-08-22 02:57:56
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34