斑馬線智能控制系統的研究
2022-07-23 06:35:38貴州商學院蔣元敬任亞哥胡燦婷
電子世界 2022年1期
貴州商學院 蔣元敬 蘇 藏 任亞哥 胡燦婷 劉 衛
隨著物聯網相關技術在各個領域得到廣泛應用,使得信息感知及采集技術的即時性成為可能,交通系統的感知能力得到空前提升,大幅緩解了交通擁堵現狀,提升城市交通路網的效能與出行質量。本文設計了一個模型基于AT89C51單片機智能斑馬線,每個功能模塊設計主要是連接到主控制系統,通過將收集的信息將被發送到主控制模塊,各個模塊主控制模塊接收到相應的信號和相應的控制機構給各個模塊,從而協調斑馬線的正常運行。當行人通過斑馬線時,斑馬線將會通過系統阻止車輛通行,以減少車禍發生頻次。
1 智慧線系統背景
1.1 斑馬線交通的現狀及背景
目前,隨著科技的進步和人們生活水平的提高,私家車已經成為許多家庭不可缺少的交通工具。然而,它也帶來了很多交通問題,如交通擁堵,行人過馬路,事故頻發,早晚高峰時段交通擁堵。這種矛盾容易加劇,已成為亟待解決的交通問題。根據國家統計局提供的數據,全球每年約有125萬人死于道路交通事故,相當于每天有3500人死于交通事故。世界衛生組織表示,道路交通死亡和受傷的主要風險是超速駕駛。因此,目前交通事故也是世界面臨的一個重大問題。
根據近幾年的汽車擁有量及其年份的數據分析,通過數據擬合方式,預估以后車輛多少的走向。
通過對民用汽車擁有量和私人汽車擁有量進行數據匯總得到總汽車擁有量數據,總汽車擁有量和年份通過EXCEL建立簡單一元線性回歸,總體趨勢為隨年份的增長,總汽車擁有量不斷增多。簡單線性回歸方程的R方為0.955,接近于1,說明方程擬合程度良好。2014-2020年上半年中國機動車和汽車保有量如圖1所示。2010-2021年分析總汽車量隨著年份變化的關系如圖2所示。

圖1 2014-2020年上半年中國機動車和汽車保有量

圖2 2010-2021年分析總汽車量隨著年份變化的關系
1.2 交通事故數據分析及其痛點
通過交通事故數據進行圖形分析。柱形圖的交通事故總計數是呈現一個波動的變化趨勢,其中2018年達到了近十年事故總計的頂峰。其中死亡人數呈現波動小的趨勢的上升情況,直接財產損失也是逐步上升的趨勢。如圖3所示。

圖3 交通事故柱狀圖
2 智慧線硬件設計
2.1 智慧線總體模塊設計
本設計是主要是通過AT89C51單片機進行設計,根據其接受到的信號控制交通燈的循環顯示、電機驅動模塊驅動電機工作、紅外人體檢測模塊的工作狀態和語音模塊提示違規行人。整個系統運行的啟動與停止將通過按鍵模塊進行相應控制,系統總體的電路設計如圖4所示。
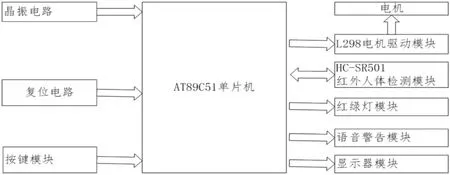
圖4 系統框圖
設計智能識別系統的功能,將強行闖紅燈的行人記錄并上傳存入交管部門,當達到一定次數后通知其提交相應的處罰。最后一個功能則是在裝置50m遠處放有車輛檢測裝置,在顯示屏幕提示,即將過馬路的行人將有車輛到來注意觀察周圍情況。以免不必要的事故發生。整個系統運行的啟動與停止將通過按鍵模塊進行相應自動控制。
2.2 智慧線各個功能模塊的選擇
2.2.1 主控制器模塊
主控制模塊主要選用AT89C51單片機,主要是因為它是最基礎的控制器,支持掉電模式和低功耗模式,當系統自動掉電后,單片機控制器中的數據不會隨著掉電而丟失。并且是一款4K字節可編程flash存儲器的高性能8位嵌入式高效微處理器,在閑置模式下,CPU保持睡眠狀態,較為節能,比較好的是單片機中RAM、串口、計數器、計時器及中斷系統始終保持激活狀態。
2.2.2 電機模塊
主要采用L298電機驅動器,來控制斑馬線屏障欄裝置的升降,將步進電機以及電機的驅動模塊相結合對斑馬線屏障欄裝置進行升降控制,優點在于這款電機能夠耐高壓,且是由L298電機驅動器制作而成,該電機能夠實現反轉和正轉等功能。具有高電壓、高電流、帶負載能力強和抗干擾能力強等優點
2.2.3 智能斑馬線屏障欄模塊
考慮到駕駛員因駕駛速度過快不能及時減速,可能導致和斑馬線屏障欄碰撞的情況,故將斑馬線屏障欄裝置制作材料改成物理心態為硬膠的合成橡膠,避免此類情況。該合成橡膠具有耐高溫、耐腐蝕和較強可逆形變的彈性。當駕駛員剎車失靈或闖紅燈時,斑馬線屏障欄會被壓縮至地面,當車間經過后,會自動復原,就避免了因意外導致的事故,使得行人安全通行和駕駛員安全駕駛。
2.2.4 紅外檢測模塊
紅外模塊主要采用的是HC-SR501傳感器,這是一款能夠通過對人體感應的傳感器,主要通過感應人體來進行數據收集,具有連續和單次兩種檢測模式,本文設計主要采用的是連續檢測模式進行檢測。主要的工作電壓位于4.5V-20V之間,檢測的范圍在7m或14m以內,根據實際可調節,并且具備高靈敏度,自動感應和低消耗模式的優點。
2.3 智慧線系統模塊主要功能實現步驟
2.3.1 電機模塊的功能原理
整個系統設計,需要有較大的的驅動裝置,需要選擇具有較大驅動電機的運轉來提供動力,由于本文選用的是L298電機驅動模塊,該模塊主要的原理如圖5所示,通過電機控制的原理,輸出引腳主要作用是控制電機的正轉與反轉。IN1、IN2及ENA控制電機D1的轉動,IN3、IN4及ENB控制電機D2的轉動,為整個設計提供驅動力。
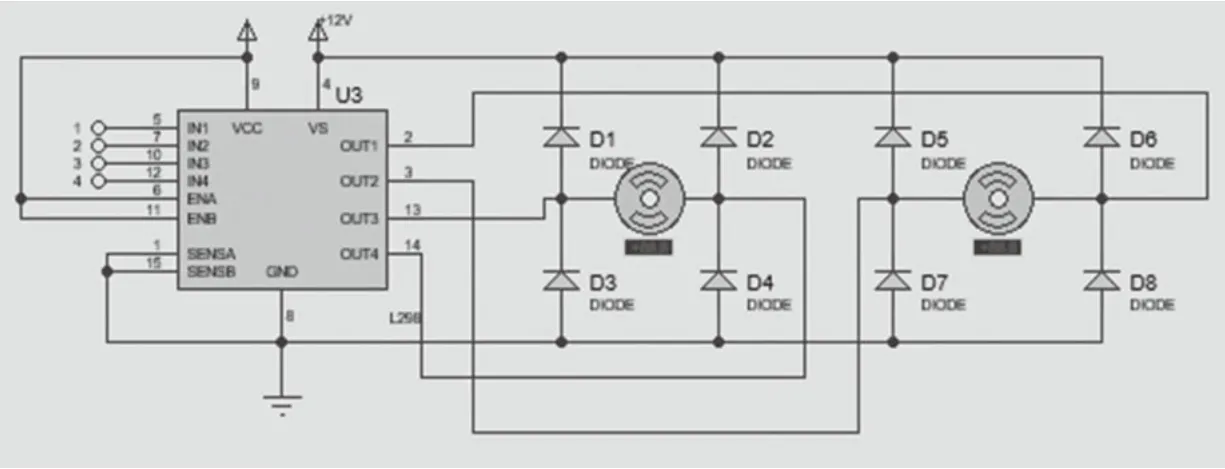
圖5 電機驅動模塊電路圖
2.3.2 交通燈模塊的功能原理
該交通燈主要采用LED燈來表示紅綠燈,主要采用單向發光二極管。在本系統中,分別將三個LED正極連接到電源上,作為交通燈,LED的負極通過電阻串聯到主芯片的I/O管腳上,進行電路保護。當主芯片向其發送低電平信號時,LED導通顯示光態。因為51單片機的工作電壓為5v,并且發光二極管的正常使用電壓在5v以下,在線路中接入電阻R,目的是為了保護發光二極管,預防發光二極管損壞。交通燈模塊如圖6所示。

圖6 交通燈模塊
2.4 智慧線總體原理圖實現
為了實現系統的正常運行,首先需要根據系統的功能和各個模塊的工作原理,使用Altium Designer軟件繪制出相應的原理圖。根據原理圖完成系統設計后,將運行程序下載到系統的主芯片上,檢查系統是否可以正常運行。本設計采用基于C語言的KEIL4軟件編寫系統運行程序。在系統運行過程中,單片機運行相應的系統程序,控制交通燈的流通和電機正反向功能模塊的協調,防止駕駛員和行人闖紅燈,造成交通事故。當系統運行環境出現緊急情況或需要進行相應的維護時,可通過按下系統設置的按鈕停止系統。Altium Designer繪制原理圖如圖7所示。
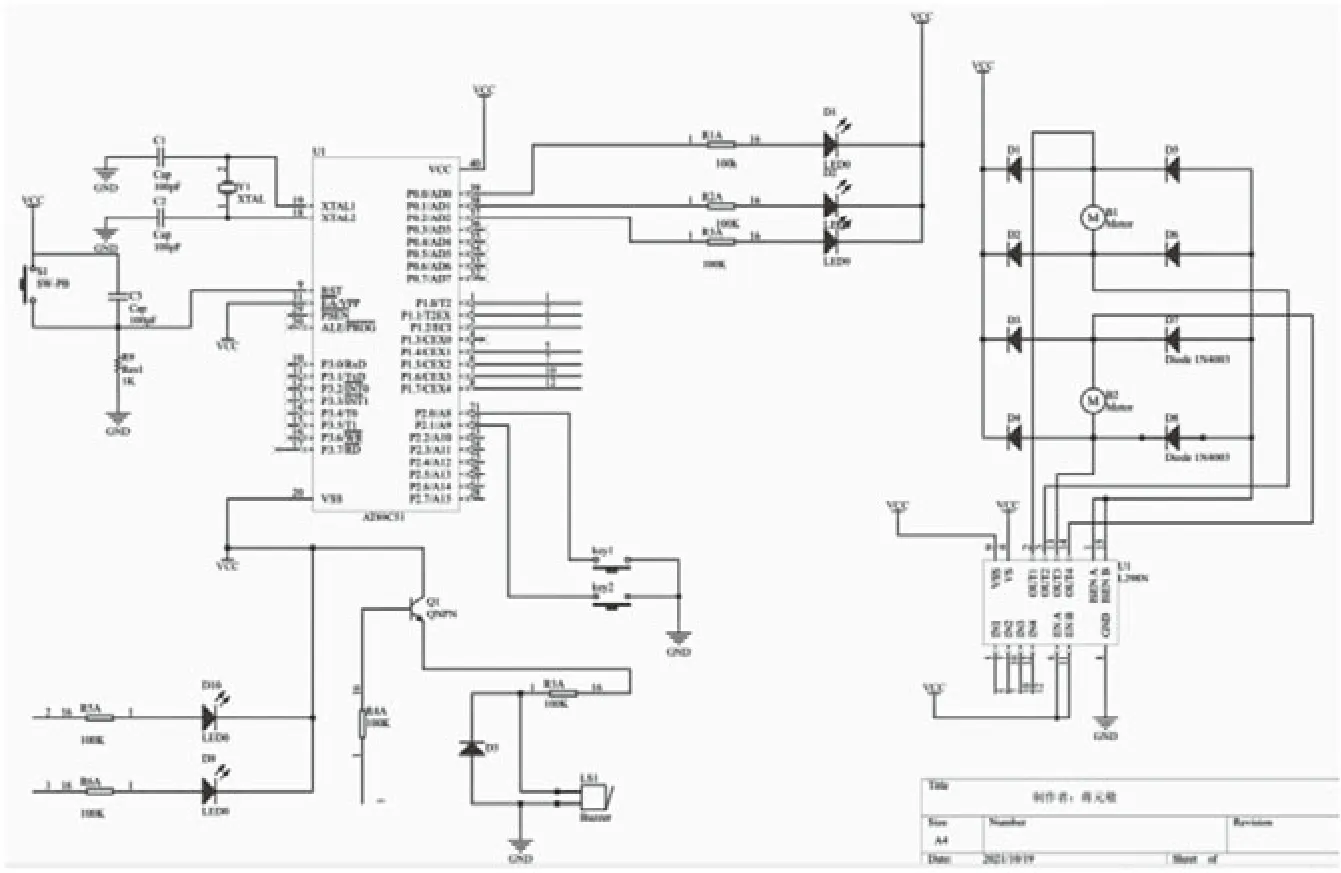
圖7 Altium Designer繪制原理圖
3 智慧線軟件設計
3.1 智慧線系統程序設計
在整個系統運行中,該系統設計主要是采用上電復位方式來進行復位,將連接整個電路后恢復到初始狀態,程序進行初始化之后,系統開始運行系統程序,在系統功能實現中主要是判斷按鍵key1是否按下,若key1按鍵按下,則系統處于運行狀態,反之終止運行,各個模塊將不參與任何工作。在整個系統執行中。key2按鍵被按下同樣終止運行。
3.2 交通燈模塊的程序設計
該模塊程序設計為交通燈紅燈點亮一段時間之后黃燈亮起,黃燈點亮一段時間之后綠燈亮起,綠燈亮起一段時間之后紅燈又會再次點亮。若該模塊沒有收到主控模塊發出的相應指令就會一直循環此過程,直到收到主控模塊發出的停止指令才會結束其運行狀態,如圖8所示。
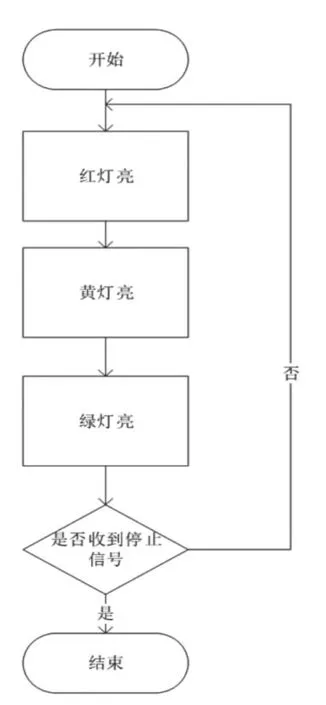
圖8 交通燈流程
3.3 智慧斑馬線屏障欄模塊程序設計
該模塊的程序設計為首先判斷系統中的紅燈是否為點亮狀態,若是則使司機端斑馬線屏障欄下降,行人端斑馬線屏障欄升高。完成此操作之后再判斷綠燈是否點亮,當綠燈被點亮時司機端的斑馬線屏障欄升高,同時行人端的斑馬線屏障欄下降。若該模塊收到主控模塊發出的結束指令,整個模塊將停止運行。如圖9所示。

圖9 斑馬線屏障欄模塊流程
3.4 語音提示及紅外人體檢測模塊的程序設計
該模塊的程序設計為首先判斷紅燈是否亮起,紅燈亮起時紅外人體檢測模塊將進入工作狀態,若檢測到斑馬線上有行人主控模塊將啟動語音提示模塊對其發出相應的語音提示。之后會判斷綠燈是否被點亮,若綠燈亮起則該模塊停止工作,如圖10所示。

圖10 紅外人體及語音提示功能流程
4 智慧線系統仿真及運行
本文系統設計的主要實現功能主要以虛擬仿真的方式,對系統進行模擬,主要采用的工具是Proteus,這是對電路仿真的一種快捷方式,在該軟件中繪制主控制原理圖,將各個元器件及其控制芯片找到并連接好原理圖,同時將編寫好的代碼在keil4中運行,生成.hex文檔,Proteus中點擊單片機,將.hex文檔下載到單片機中,并查看各個電路模塊是否能正常工作。本設計主要用蜂鳴器來代表語音模塊。在仿真系統中,LED4、LED5和報警電路模擬紅外人體檢測和語音提示模塊。LED4的開關狀態模擬了紅外人體檢測模塊的工作狀態,LED5的閃爍狀態主要模擬了紅外人體檢測模塊對非法行人的檢測。仿真結果如圖11所示。
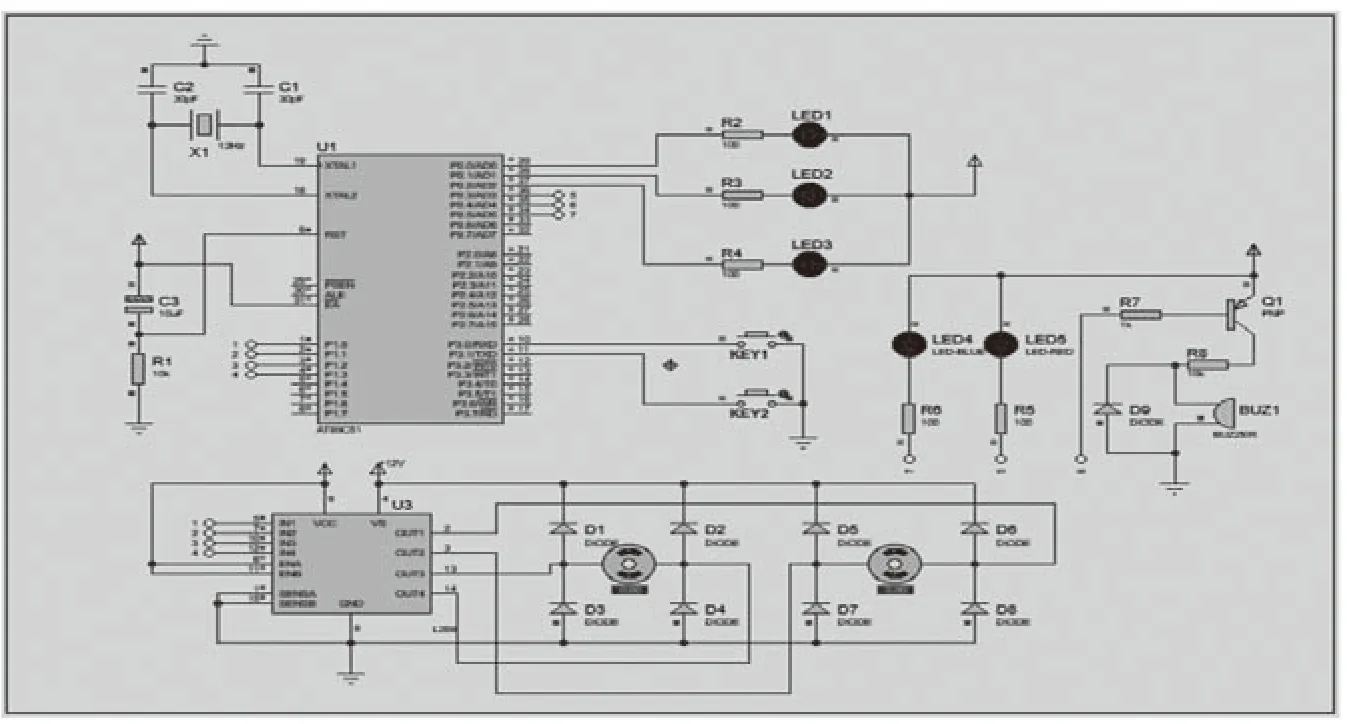
圖11 智能斑馬線屏障欄系統仿真圖
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45