基于單光子計數反饋的低噪聲光纖信道波分復用實時偏振補償系統*
2022-07-22 05:55:54曹若琳彭清軒王金東陳勇杰黃云飛於亞飛魏正軍張智明
物理學報 2022年13期
曹若琳 彭清軒 王金東 陳勇杰 黃云飛 於亞飛 魏正軍 張智明
(華南師范大學信息光電子科技學院,廣東省量子調控工程與材料重點實驗室,廣州 510006)
1 引言
量子密鑰分發(quantum key distribution,QKD)系統利用量子物理學的基本原理保證了密鑰分發的無條件安全性[1,2],自1984 年第一個量子密鑰分發協議(BB84 協議)被提出以來[3],經過三十多年的理論研究和實驗技術的發展,已成為量子信息領域最為成熟的重要分支.在以光纖信道為傳輸媒介的QKD 系統中,可以使用多種自由度對光子信號進行編碼,如偏振[4,5]、相位[6]、角動量[7]及時隙[8]等,其中,由于偏振具有編解碼簡單等優點,因此成為量子密鑰分發常用的編解碼方式之一[3,9].但是,由于光子偏振態在單模光纖中傳輸時受到光纖本身制造缺陷或外界環境的影響,造成隨機的偏振變化[10],嚴重影響了偏振編碼QKD 系統的性能[11].因此,為提高偏振編碼QKD 系統的穩定性,需要引入光纖信道偏振補償技術[12].光纖信道偏振補償系統的目標是為了使QKD 系統能夠穩定工作,對于不同架構的QKD 系統,其偏振補償系統的技術需求也不盡相同.目前,主要有制備測量型(prepare-and-measure,PM) QKD 系統和基于糾纏(entanglement-based,EB)的QKD 系統兩大類.對于應用在PM-QKD 系統中的偏振補償方案,可分為中斷式偏振補償、時分復用偏振補償(time division multiplexing,TDM)、波分復用偏振補償(wavelength division multiplexing,WDM)和基于后處理過程的偏振補償方案.在中斷式偏振補償方案[13]中,接收端的偏振補償程序可根據傳輸光纖的長度設置不同的中斷補償周期,在接收端向發送端發出執行偏振補償任務的中斷信號后,系統進入偏振補償階段,當接收端判斷補償后的偏振態(state of polarization,SOP)和目標SOP 足夠接近時(其偏差小于用戶設置的閾值),系統進入QKD階段.2007 年,Chen 等[13]首次測試的中斷式偏振補償系統用于QKD 的平均量子誤碼率(quantum bit error rate,QBER)約為3.9%.在TDM 方案中[14,15],參考光與量子信號光利用時分復用的方式進行傳輸,接收端利用參考光和量子信號光設置的不同時延,使用不同的探測器分別探測2 種光信號,通過測量參考光的偏振消光比來判斷是否需要糾偏.2009 年,Chen 等[14]首次測試的TDM 方案用于QKD 的平均誤碼率為5.27%.在WDM 方案中[11,16,17],參考光與量子信號光利用不同波長進行波分復用來實現同時傳輸,接收端利用解波分復用器分離參考光與量子信號光,通過光電探測器探測參考光的光強信息來反饋SOP 的變化.2008 年和2009 年,Xavier 等[11,16]設計了2 種WDM 方案,分別運行在8.5 km 和16 km 的光纖信道上,測試了偏振補償系統引起的附加誤碼率分別為0.04%和1.2%.2018 年,Li 等[17]設計的WDM 方案在68 km的空中光纜中測試的QKD 誤碼率低于1.5%.在基于后處理過程的偏振補償方案中[18],接收端利用QKD 后處理過程中誤碼糾錯時舍棄的(約10%)密鑰位來計算反饋控制信號,該系統未使用參考光信號,因此減少了相應設備,但需要累積一定時間以獲得偏振變化的信息.2016 年,Ding 等[18]設計的基于后處理過程的偏振補償方案用于QKD 的平均誤碼率為2.32%.對于應用在EB-QKD 系統的偏振補償方案[19,20],利用了糾纏光子對之間的關聯,在其中1 條光纖信道上設置了1 組液晶可變延遲器作為電動偏振控制器(electrical polarization controller,EPC),并采用QBER 作為反饋控制信號來執行偏振補償操作.2021 年,Shi 等[19,20]設計的EB-QKD 系統的偏振補償方案平均誤碼率約為6.4%,可以用來應對緩慢偏振變化的應用場景.
相較于中斷式偏振補償方案,TDM 方案不需要中斷QKD 過程,可實現實時的偏振補償工作,而相較于TDM 方案,WDM 方案的參考光信號未占用發送時隙,提高了量子信號光的傳輸效率,更適合用于高速率的QKD 系統.本文旨在利用WDM系統的優勢,進一步降低其誤碼率,實現低噪高速的光纖信道補償系統.基于WDM 偏振補償的QKD系統的誤碼的主要來源有:1)參考光產生的拉曼散射噪聲以及器件串擾引入的誤碼[11];2)參考光和量子信號光由于波長不同而存在的補償偏差[16];3)偏振補償精度導致的偏振補償偏差.針對上述引入誤碼的主要來源,我們設置了平均每脈沖光子數為0.4 的弱參考光以及引入濾波器(filter,FI)來減小由于參考光的散射噪聲引入的誤碼,設置了參考光和量子信號光波長間隔為0.8 nm 以控制波長不同而引起的偏振補償偏差,同時采用了單光子探測器輸出的數字信號作為計算補償反饋的參量,無需再進行模數轉換,有效提升了偏振補償精度.在實際應用方面,偏振補償速度也是一個很重要的挑戰,因此,本文還通過引入共軛偏振基并行補償算法有效提升了偏振補償速度.基于上述改進,我們最終構建了1 個基于WDM 的光纖信道補償系統,并在25.2 km 的光纖鏈路上實現了BB84 協議4 種偏振態的穩定傳輸,分別得到了8 h 實驗室環境和模擬城域網地埋光纖擾動環境下4 種量子信號光的傳輸誤碼率,測試結果顯示本系統具有低誤碼率優勢,可用于解決城域網內地埋光纖中的偏振變化問題.
2 基本原理
當發送的偏振光信號|P〉in經過光纖信道傳輸到接收端時,信號的SOP 由于單模光纖受到自身應力或外界環境的影響,產生隨機雙折射引起偏振模色散,使得發送的偏振態出現隨機變化[21].假設光纖信道的偏振傳輸矩陣為ME,則輸出偏振光|P〉out與輸入偏振光|P〉in的關系有[11]:

為解決光纖信道對輸入偏振光的影響,需引入偏振控制裝置.偏振控制實驗通常在光纖信道末端與接收端的起始位置處設置EPC,EPC 是由4個光纖擠壓器S1,S2,S3和S4組成的,通過輸入數字/模擬電壓信號驅動擠壓器.當光纖在壓力作用下產生線性雙折射時,根據不同的相位延遲,EPC 可以使輸入的任意偏振態的轉換為需要的目標偏振態[22].例如,當EPC 提供瓊斯矩陣為MR的偏振變化時,若,那么受到光纖信道偏振影響的輸出偏振光|P〉out經過EPC 后將有:

由此,實現了偏振光信號的補償操作.在利用WDM 的偏振補償系統中,可以通過引入一組共軛線偏振態的參考光與量子信號光進行同時傳輸,光纖信道帶來的偏振變化將同時作用于這組非正交偏振態的參考光和量子信號光.設置接收端EPC以及偏振分束器(polarization beam splitter,PBS)的光軸對準發送來的線偏振態參考光,利用不同線偏振態在偏振分束器輸出端的投影比值不同的原理,選擇偏振分束比中輸出極小值一端對應的參考光單光子計數值作為反饋偏振態的參量.根據光子計數值的變化判斷偏振態是否改變,然后根據變化量施加步長電壓至EPC,控制EPC 完成對參考光和信號光偏振態的補償.理論上利用1 組非正交的參考光即可實現對信號光任意偏振狀態的完全控制[11].
在選擇參考光與量子信號光的波長時,由于光子偏振態在產生偏振變化時具有波長依賴性,參考光與量子信號光因波長不同,隨著光纖信道傳輸后偏振變化也會產生偏差,導致誤碼率的升高.該變化程度受到參考光與量子信號光之間的波長間隔Δω和光纖信道差分群時延τ的影響[16],當滿足τΔω ?1 時,通過補償參考光偏振變化即可實現對量子信號光偏振態的良好控制,因此,我們選用參考光波長與量子信號光波長間隔為0.8 nm,光纖信道PMD 為0.04,滿足τΔω ?1,因此參考光偏振態與量子信號光偏振態具有較好的相關性[23].
從實際應用方面考慮,實時偏振補償模塊應具有較短的補償時間,因此,我們引入了共軛偏振基并行補償方式.在偏振補償裝置中,現場可編程門陣列(field programmable gate array,FPGA)根據接收到的反饋信息控制EPC 進行偏振態的變化,當FPGA 輸入電壓信號控制EPC 的4 個擠壓器時,偏振態將繞x軸、y軸實現順時針或者逆時針的變化[24].任意1 個完全偏振光均可用邦加球上1 個點表示[21],在圖1 中目標偏振態為|H〉和|+〉,經過干擾后的待補償偏振態為|H′〉 和|+′〉 .對于偏振態|H′〉 補償步驟為:EPC 調節擠壓器使|H′〉 繞邦加球的x軸旋轉為偏振態|A〉;再調節另1 個擠壓器使|A〉繞 邦加球的y軸旋轉到偏振態|H〉.對于偏振態|+′〉 補償步驟為:EPC 調節擠壓器使|+′〉 繞邦加球的y軸旋轉為偏振態|B〉;再調節另1 個擠壓器使|B〉繞邦加球的x軸旋轉到偏振態|+〉 .若利用1 個EPC 補償1 組非正交偏振態,則控制其中1 個偏振態進行偏振變化時另1 個偏振態也會隨之變化,即補償1 個基的偏振態時會影響另1 個基下的偏振態,補償過程耦合在一起會導致整個過程的步驟增多收斂速度變慢[25],增加補償時間,因此若利用2 個EPC 分別控制一組共軛基下的偏振態的進行并行補償工作時,可提升補償速度,減小補償時間.
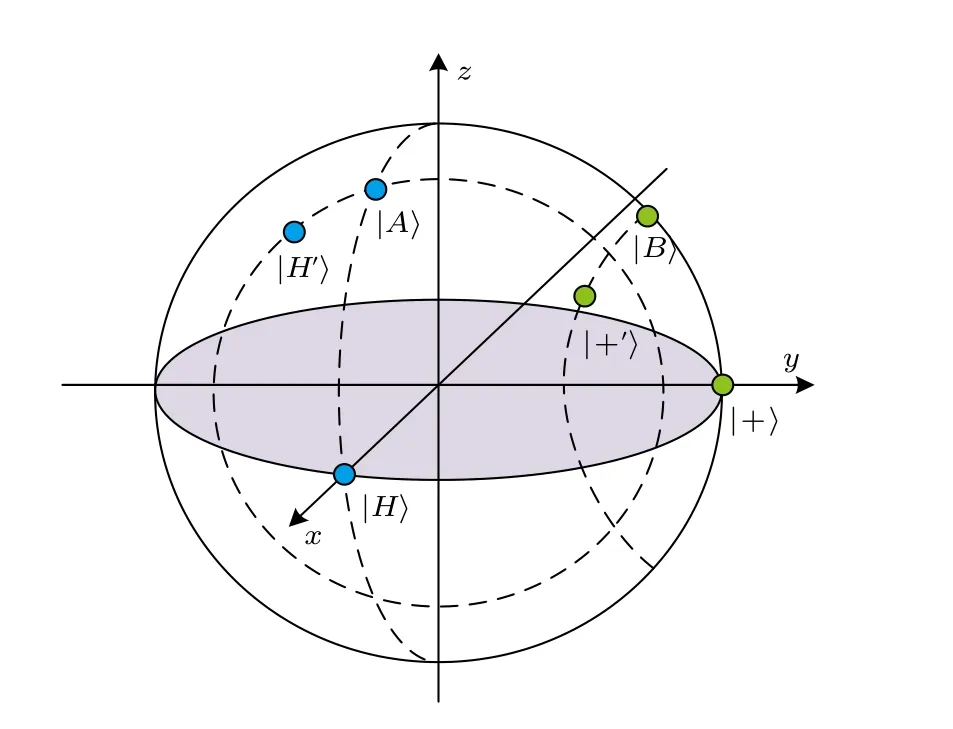
圖1 SOP 在邦加球上的補償過程示意圖Fig.1.Compensation process of SOP on Poincaré sphere.
3 低噪聲光纖信道WDM 實時偏振補償系統
低噪聲光纖信道WDM 實時偏振補償系統示意圖如圖2 所示.在發射端(Alice),高速皮秒脈沖激光器(laser diodes,LD)LD-2 產生頻率為62.5 MHz,脈沖寬度50 ps,中心波長為1550.13 nm 的量子信號光,LD-1 和LD-3 用于產生頻率為250 MHz,脈沖寬度為50 ps,中心波長分別為1550.93 nm 和1549.32 nm 的參考光,2 種參考光與量子信號光的波長間隔均為0.8 nm.光纖信道PMD 為0.04 ps,根據τΔω ?1 可知參考光SOP 與量子信號光SOP具有良好相關性.光隔離器(isolator,ISO)可減小回波反射噪聲,保護LD 使其具有穩定的工作狀態.濾波器用于限制對應波長參考光的帶寬范圍,從而減小參考光對信號光探測時的噪聲影響.密集波分復用器(dense wavelength division multiplexer,DWDM)波長間隔為0.8 nm,其中C33 和C35 通道用于傳輸共軛參考光,C34 通道用于傳輸量子信號光,插入損耗為0.9 dB,相鄰通道間隔離度大于30 dB,非相鄰通道間隔離度大于35 dB.分束器(beam splitter,BS)BS-1 分束比為99∶1,其中99%的尾纖連接PBS,1%的尾纖連接衰減器(attenuator,ATT).C33 和C35 通道對應1 組共軛SOP參考光,通過利用手動偏振控制器(polarization controller,PC) PC-1,PC-2,PBS-1 和光功率計(optical power meter,OPM) OPM-1 和OPM-2 進行偏振態的制備和本地校準,調節PC 可使對應通道的偏振光與PBS 的光軸對準[4],|H〉參考光在PBS 透射端口OPM 有極大值,|+〉 參考光經過PBS 在透射端口與反射端口OPM 有1∶1 比值,從而得到共軛參考光,PBS-1 消光比為30 dB,本地校準操作將在開始量子密鑰分發工作前完成.在光信號進入25.2 km 光纖信道前,ATT 將每路參考光衰減至平均光子數0.4,該設置可以滿足補償程序的控制精度需求,同時,光強較弱的參考光信號產生散射噪聲和串擾對量子信號光的探測影響也隨之降低.
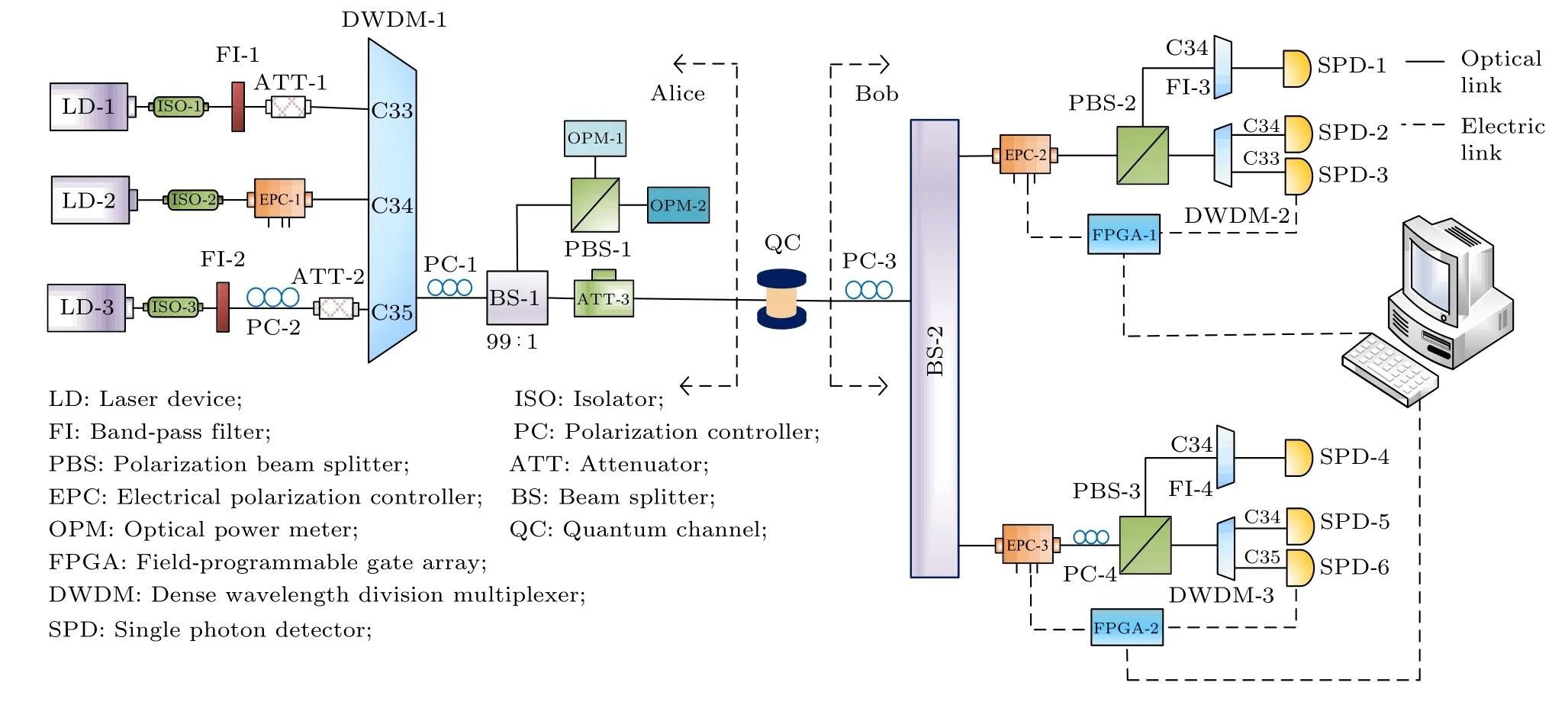
圖2 低噪聲光纖信道WDM 實時偏振補償系統示意圖Fig.2.Schematic diagram of low noise fiber channel WDM real-time polarization compensation system.
在接收端(Bob),BS 將傳輸來的光信號進行等比例分束,PC-3 與BS 上路尾纖后的PBS-2 用于測量Z 基下參考光和量子信號光的|H〉、|V〉,下路尾纖后的PC-4 用于將光軸旋轉45°再與PC-3 和PBS-3 共同測量X 基下參考光和量子信號光的|+〉、|-〉.EPC-2 與EPC-3 分別用于控制Z 基于X 基下的偏振光信號.DWDM-2 和DWDM-3將對應通道的參考光和量子信號光進行解復用,FI-3 和FI-4 分別用于濾除C33 和C35 通道的參考光,僅允許C34 通道量子信號光進入單光子探測器(single photon detector,SPD).
參考光利用門控頻率為1.25 GHz 的InGaAs/InP 單光子探測器進行光子計數,探測門寬約300 ps,死時間為100 ns,探測效率為18.1%,平均暗計數為1.2 × 10—6.SPD-3、SPD-6 將探測到的參考光光子計數轉化為LVTTL 數字信號并實時傳送至FPGA,由FPGA 操控EPC 實現偏振控制.圖3 中偏振控制程序采用了近似梯度下降搜索算法,設計的物理思想是:1)利用不同的線偏振態在接收端偏振分束器輸出端的投影比值不同的原理,選擇偏振分束比中輸出極小值一端對應的參考光單光子計數值作為反饋偏振態的參量;2)在理想情況中(不考慮單光子探測器的暗計數)的目標線偏振態經過偏振分束器投影后極小值端口的單光子計數為0;3)當偏振態發生變化時,其投影后極小值端口的光子計數值將會上升,當上升至超過錯誤閾值時,根據當前計數與目標計數作差的距離值計算步長電壓,將步長電壓加載至EPC 的任一擠壓器上進行偏振態的變化;4)若再次累計光子計數得到的新距離值相較于上一次的距離值有所減小則繼續施加步長電壓至該擠壓器,否則更換擠壓器施加步長電壓,直至補償后的計數值小于錯誤閾值,完成對參考光及信號光的偏振補償工作.
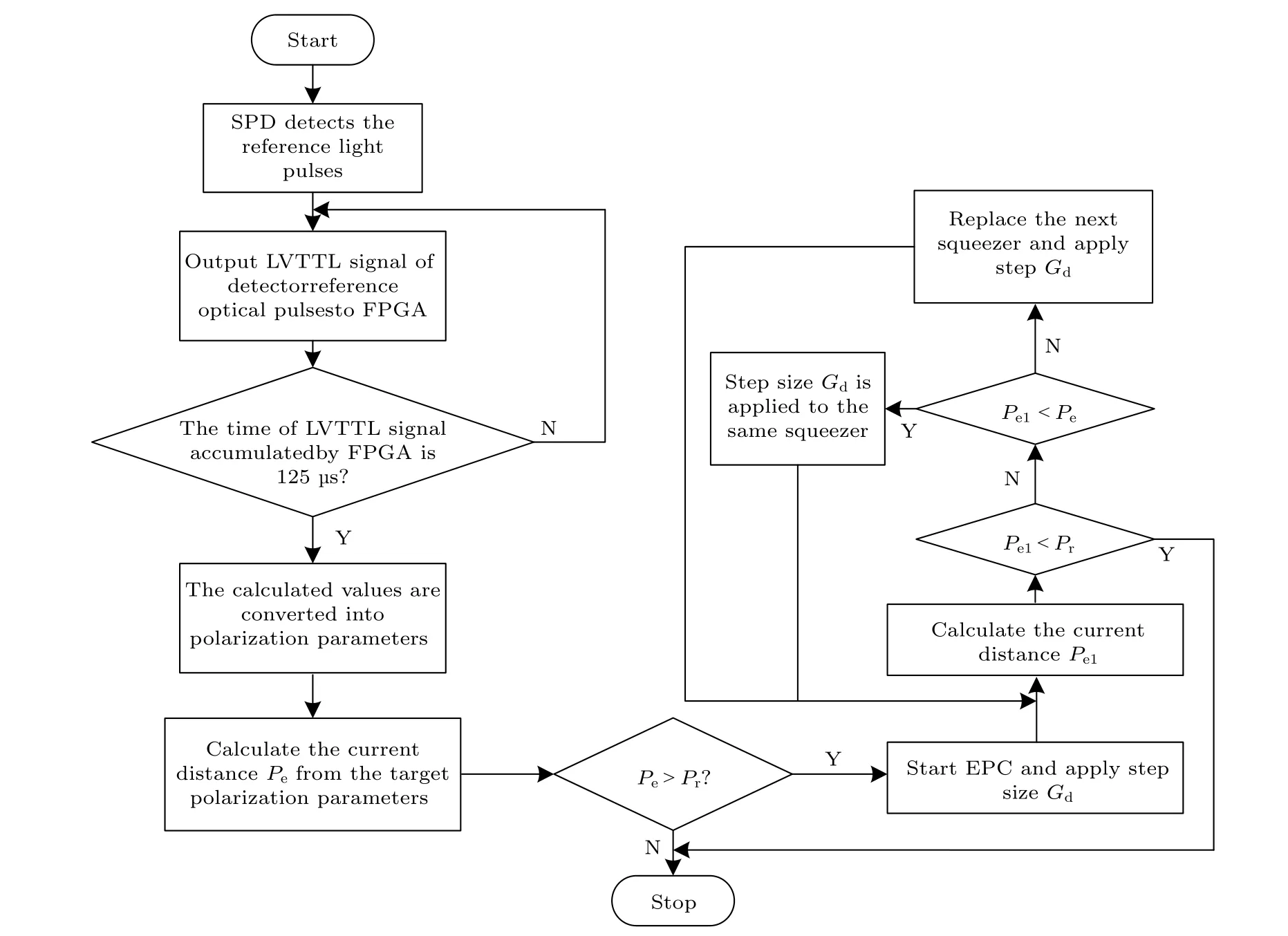
圖3 偏振補償程序流程圖Fig.3.Flow chart of polarization compensation program.
其實施步驟如下:1)FPGA 統計單采時間(125 μs)的LVTTL 數字信號計數后,將該計數值轉換為12 位二進制數以得到反饋偏振參量;2)根據偏振態信號傳輸后未發生偏振變化的光子計數值設置目標偏振參數(包含暗計數),計算當前反饋偏振參數與目標偏振參數的距離值Pe;3)當距離值Pe>依據2%誤碼率對應的錯誤閾值Pr,同時符合累計判斷機制(防止偶然出現的光子數變化導致超出閾值的情況),則開啟補償工作,否則結束補償;4)在EPC 的某一擠壓器(n)上施加步長電壓Gd(Gd=Pe/η,η為設定的參數值),統計當前單采時間內的反饋偏振參數對應的距離值Pe1,若Pe1<Pr,則結束補償工作,若Pe1>Pr,則繼續進行判斷;5)判斷當Pe1<Pe,則繼續在當前擠壓器上施加Gd;若Pe1>Pe,則更換擠 壓器施加Gd,并更新Pe=Pe1,循環執行步驟4),5)直至結束補償工作.
4 基于QKD 系統的偏振補償實驗測試
本偏振補償系統的有效性利用基于BB84 協議的偏振編碼QKD 實驗進行測試,整體實驗中參考光脈沖、信號光脈沖及探測器均由時鐘發生器提供時鐘同步.如圖2 所示,Alice 端LD-2 產生頻率為62.5 MHz,脈寬為 50 ps 的信號光脈沖,由FPGA輸出數字調制信號傳輸至EPC 壓電驅動模塊制備偏振光,即在BB84 協議的|H〉、|V〉、|+〉、|-〉4 種SOP 下進行切換,進入光纖信道前由ATT 將信號光脈沖衰減至單光子量級,平均光子數為0.3,在Bob 端經過BS 分束后分別由對應偏振基下的EPC進行補償操作,信號光探測器為自由運行模式的InGaAs 單光子探測器,檢測效率設置為15%,暗計數為550/s.
根據文獻[12]的測試結果可知,在城域網環境中當地埋光纖長度小于30 km 時,所需的偏振補償速度應達到每秒鐘幾個rad[12].為測試本系統的實際補償效果,通過在25.2 km 的光纖鏈路末端處利用EPC 設置1 個偏振擾頻器,借助FPGA 提供隨機數字信號至擾偏器的4 個擠壓器,控制SOP在邦加球上實現頻率為2π rad/s 的偏振變化來模擬城域網中地埋光纖的偏振變化現象.在利用參考光信號的光子計數作為反饋信號來進行實時偏振參量分析的算法中,我們的目標是使量子信號光的QBER 最小化,因為若SOP 發生變化,則QBER將上升.本文中的QBER 為對本實驗系統進行偏振補償效果評估的誤碼率,未表示完整QKD 實驗中最終所得的誤碼率.為驗證補償效果,首先在未運行補償程序時,測試實驗室環境中利用25.2 km的單模光纖作為光纖信道的量子信號光|H〉偏振態變化情況,如圖4 所示.
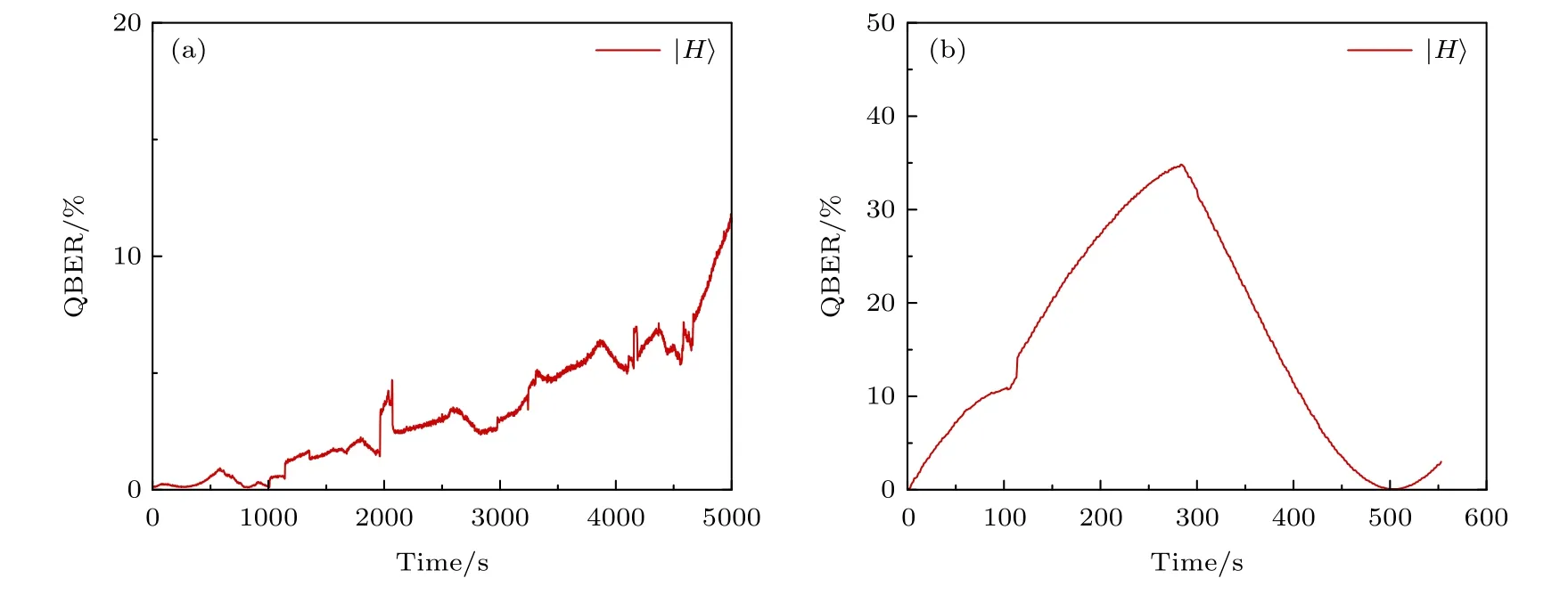
圖4 偏振補償模塊未啟動時量子信號光|H〉 偏振變化引起QBER 變化情況 (a) 測試90 min 無擾偏器時QBER 變化情況;(b) 測試10 min 有擾偏器時QBER 變化情況Fig.4.QBER variation of quantum signal caused by polarization drift without compensation:(a) QBER variation in 90 minutes without scrambler;(b) QBER variation in 10 minutes with scrambler.
圖4 中橫坐標表示時間,縱坐標表示QBER,曲線由每秒鐘采集1 次單光子計數計算QBER 所繪制.由未進行補償控制時,測試量子信號光|H〉偏振變化引起QBER 的變化結果可知,無論在有擾偏器還是無擾偏器設置的系統中,光子偏振態均發生不同程度的變化,若無偏振控制模塊則偏振編碼系統難以實現長期的穩定運行.考慮到2 組基下的參考光與量子信號光具有不同的波長,在接收端解復用后,偏振補償的反饋信號只選取該基下對應的參考光,此時另1 個基下的參考光未作為反饋信號進行補償工作,即對于另1 種基下的量子信號光不具有有效的補償作用,并且共軛測量的結果在后處理的對基過程中將被舍棄.所以我們在實驗室設備受限的情況下,對2 組基下的參考光與量子信號光分別進行測試.
圖5 和圖6 中橫坐標時間單位為s,縱坐標表示QBER,曲線為每秒鐘采集2 次計數計算QBER的結果.圖5 為無擾偏器時穩定補償系統對應的4 種偏振態QBER 的變化情況,測試系統連續運行8 h,量子信號光發送4 種偏振態每種態測試2 h,計算得到無擾偏器時穩定補償系統|H〉、|V〉、|+〉、|-〉的平均誤碼率為0.53%,0.52%,0.54%,0.51%,每次補償完成后誤碼率均在0.4%以下.其中,內插圖表示穩定補償系統測試4 種量子信號光時,某一分鐘內偏振補償過程中的QBER 的變化情況,可以看到,當偏振變化導致QBER 增大時,補償系統可在短時間可進行穩定校準.在內插圖中,尖峰型變化表示一次偏振過程.當偏振態發生變化后QBER 將會上升,當QBER 上升至超過錯誤閾值后,程序啟動EPC 進行偏振態補償操作,但在初始補償階段,需要判斷當前使用的EPC 中的某一擠壓器是否有效,此時QBER 仍會有所上升,直到使用有效的擠壓器進行偏振補償時,QBER 將會下降,直至補償結束.
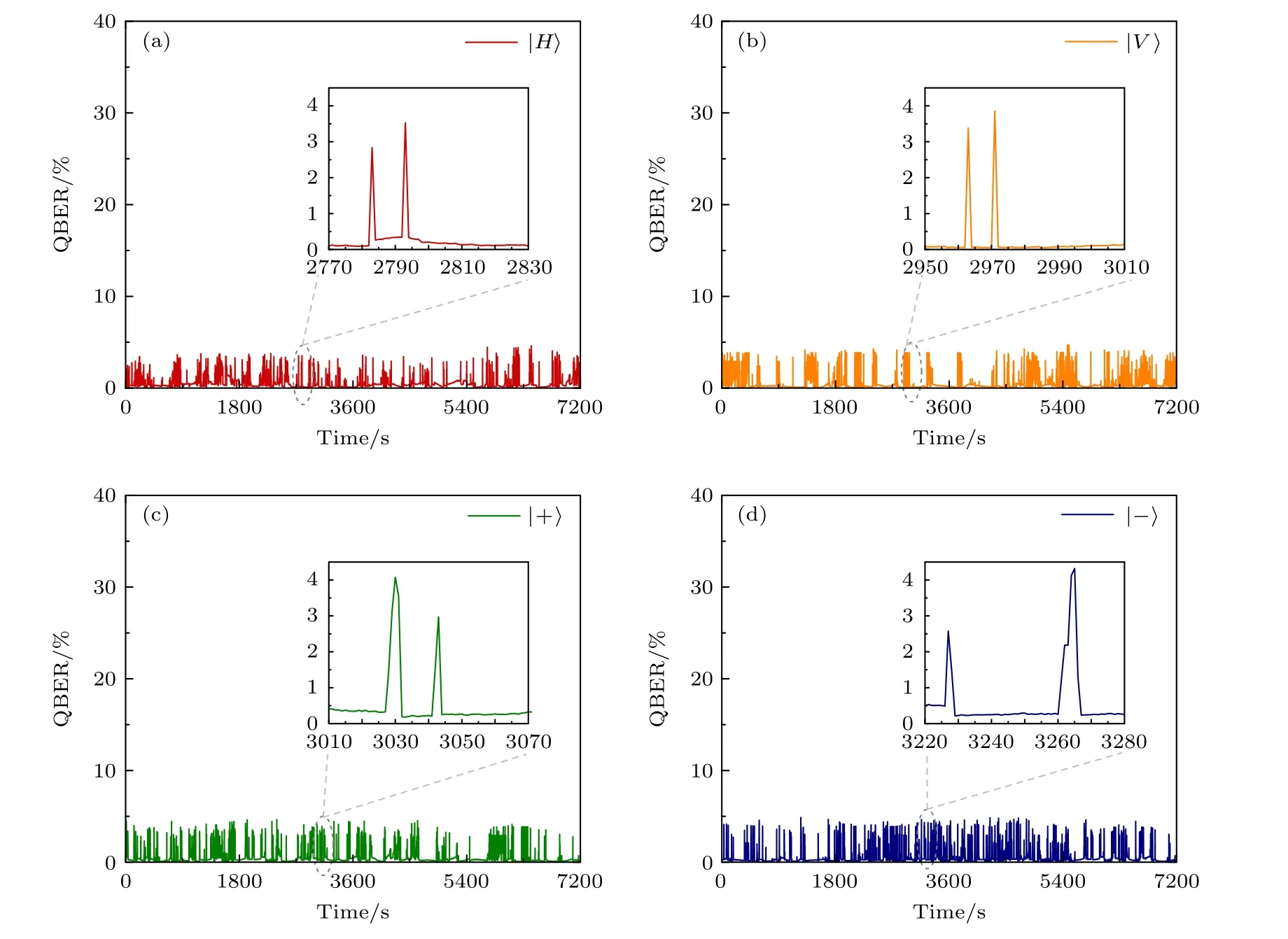
圖5 運行補償程序時量子信號光的4 種偏振態QBER 的變化 (a) 量子信號光|H〉 QBER 的變化;(b) 量子信號光|V〉 QBER的變化;(c) 量子信號光|+〉 QBER 的變化;(d) 量子信號光|-〉 QBER 的變化Fig.5.QBER variation of quantum signal in four polarization states when running the compensation program:(a) QBER variation of quantum signal in|H〉 ;(b) QBER variation of quantum signal in|V〉 ;(c) QBER variation of quantum signal in|+〉 ;(d) QBER variation of quantum signal in|-〉 .
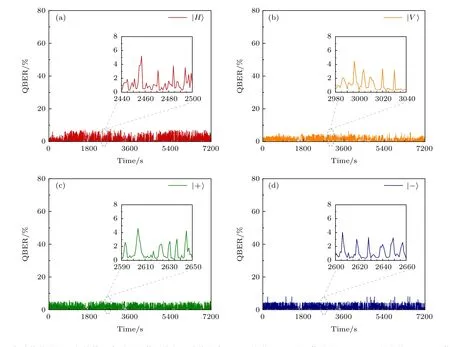
圖6 啟動擾偏器后運行補償程序時量子信號光的4 種偏振態QBER 變化 (a) 量子信號光|H〉 QBER 的變化;(b) 量子信號光|V〉 QBER 的變化;(c) 量子信號光|+〉 QBER 的變化;(d) 量子信號光|-〉 QBER 的變化Fig.6.QBER variation of the quantum signal in four polarization states after starting the scrambler and running the compensation program:(a) QBER variation of quantum signal in|H〉 ;(b) QBER variation of quantum signal in|V〉 ;(c) QBER variation of quantum signal in|+〉 ;(d) QBER variation of quantum signal in|-〉 .
圖6 為有擾偏器且擾偏速率為2πrad/s 時補償系統對應的4 種偏振態QBER 的變化情況,測試系統連續運行8 小時,量子信號光發送4 種偏振態每種態測試2 小時,有擾偏器時即模擬城域網內地埋光纖系統的偏振變化系統,4 個量子信號光|H〉、|V〉、|+〉、|-〉的平均誤碼率為1.29%,1.26%,1.20%,1.27%,每次補償完成后誤碼率均在0.8%以下.系統測試的QBER 主要包含SPD 暗計數(0.13%)以及PBS 有限消光比(25 dB)帶來的不完全偏振控制.其中,內插圖表示4 種量子信號光在測試時間段中的某一分鐘內受到擾偏器影響的偏振補償情況,可以看到,補償系統可在短時間內恢復擾偏速率為2π rad/s 時產生的偏振變化問題.
實時偏振補償模塊的核心要求具有較短的補償時間,能夠跟蹤偏振態的變化并快速完成補償工作.本實驗使用EPC 為四擠壓器型壓電陶瓷電控偏振控制器,響應時間為30 μs,通過測試有擾偏器工作時進行偏振補償的算法迭代次數,得到平均補償時間約為8 ms.由于本實驗利用參考光的單光子計數計算偏振補償模塊的反饋參量,若在不影響信號光探測的前提下,適當提高參考光平均光子數,可進一步提升控制精度并且縮短累計時間,提高補償速率.此外,可以將四擠壓器型壓電陶瓷電控偏振控制器改進為LiNbO3電光晶體偏振控制器[26],該控制器響應時間約為100 ns,相較于壓電陶瓷電控偏振控制器,可縮短補償時間,進一步縮短補償時間提升補償速率,未來可應用于解決長距離城際地埋光纖或空中光纖中SOP 快速變化的情況,進一步提高系統的實用性.
5 結論
本文構建并實驗測試了一種基于單光子計數反饋的低噪聲光纖信道波分復用實時偏振補償系統.在傳輸距離為25.2 km 的光纖鏈路中實現了基于BB84 協議的量子密鑰分發測試,借助偏振擾動器模擬了城域網內地埋光纖可能引起的偏振變化情況.在實驗室環境和模擬城域網地埋光纖偏振變化的環境中分別進行了8 h 測試,實驗得到平均QBER 分別為0.52%和1.25%,補償偏振變化的平均時間為8 ms,實驗結果表明,本系統可實現城域網地埋光纖環境下偏振編碼量子密鑰分發的穩定工作.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25