水下仿生機器人集群節能關鍵技術綜述
2022-07-22 03:23:36趙蕎蕎張立川劉祿潘光
西北工業大學學報 2022年3期
趙蕎蕎, 張立川, 劉祿, 潘光
(西北工業大學 航海學院, 陜西 西安 710072)
生物集群運動具有高機動、高適應性、高效節能等優點,是優良的水下仿生機器人集群借鑒對象[1]。借鑒生物集群運動的優勢,探索水下仿生機器人集群節能關鍵技術,實現水下仿生機器人集群節能的工程應用,對提高我國海洋資源的控制和利用能力具有顯著效益。
自然界生物集群運動的現象廣泛存在,魚群、鳥群等通過集群游動/飛行方式實現節能運動。研究表明,生物集群運動利用流場有益作用達到節能效果[2]。Weihs于1973年首次提出了魚群游動節省能量的假設,這個假設通過魚群觀測和數值模擬等方法被驗證。后來Weihs提出,生物運動會產生不同特征的流場結構,并利用流場中阻力較小的區域實現運動能耗較小化[3]。
為實現水下仿生機器人集群節能技術的工程應用,首先要明確生物集群運動的節能機理;其次,通過數值模擬的方法得到流場特征分布信息。可靠適用的流場信息感知與處理技術對實現水下仿生機器人集群節能的工程應用也是必不可少的。
采用傳感技術獲取可靠流場感知信息后,建立水下仿生機器人集群節能控制方法。水下仿生機器人集群節能關鍵技術包括生物集群節能機理、水下流場信息感知技術、水下仿生機器人集群節能控制等多個學科技術,涉及學科范圍較廣,具有較強的創新性,其關鍵技術研究對我國水下仿生機器人的發展具有重大意義。
1 生物集群運動節能機理研究現狀
1.1 活體觀測研究
生物集群運動時由于各種機制的影響,以隊形飛行的鳥或成群游動的魚,后方個體會主動穿越前方個體產生的阻力減少區域,從而減小飛行或游動的阻力。隨著魚群游動能夠節省能量的想法被提出,有學者簡單地證明了個體魚在集體環境下實現能量節省的理論[4]。Fields等[5]對太平洋鯖魚魚群的調查結果顯示,與單個魚體游動時尾巴拍打頻率相比,群體游動的魚尾部拍打頻率降低。Herskin等[6]通過對魚群的觀察和測量表明,魚群中前方游動魚的尾拍打頻率顯著高于后方魚的尾拍打頻率,該研究從耗氧量的角度解釋了群游魚中后方魚能耗低的現象。Killen等[7]從代謝率和耗氧量的角度對鯔魚魚群游動節能現象進行了研究,結果表明處于魚群后方游動的魚耗氧量較低,且尾部拍打的頻率相比于前方魚較低,該研究初步說明了水動力相互作用為魚群中后方魚提供了降低能耗的益處。
西北工業大學張棟等[8-9]對蝠鲼真實游動情況進行觀測,主要利用高清相機觀測和提取真實蝠鲼形態學和運動學特征,并對主動推進狀態、倒游狀態、轉彎狀態、滑翔狀態、俯仰狀態和急停狀態下的胸鰭軌跡進行記錄,得到了魚體的外形參數、三維物理模型及其運動學參數,并成功研制出了仿蝠鲼樣機。
上述研究通過生物活體觀測的方式揭示了集群運動的節能機理。研究表明集群運動的確能夠降低生物運動的能量消耗,同時,集群運動生物通過選擇合理的隊形及位置使整體能耗最小。這些研究為實現水下仿生機器人集群節能運動提供了啟發及基礎。
1.2 數值模擬研究
隨著科學技術的發展,越來越多的研究表明,當魚以群體的方式游動時,它們會獲得能量上的優勢。研究者們通過數值模擬的方法解釋了這種優勢的產生。
Verma等[10]利用數值模擬方法證明了魚群中后方魚會主動穿過前方魚產生的渦心低壓區,進而提高它們的游動效率。研究使用數值模擬和深度強化學習算法相結合的方法證明了上述結論。魚群游動產生的渦系如圖1所示。該結果證實了魚類可以獲取儲存在流場中的能量,并支持了在流場渦中游動具有能量優勢的推測。
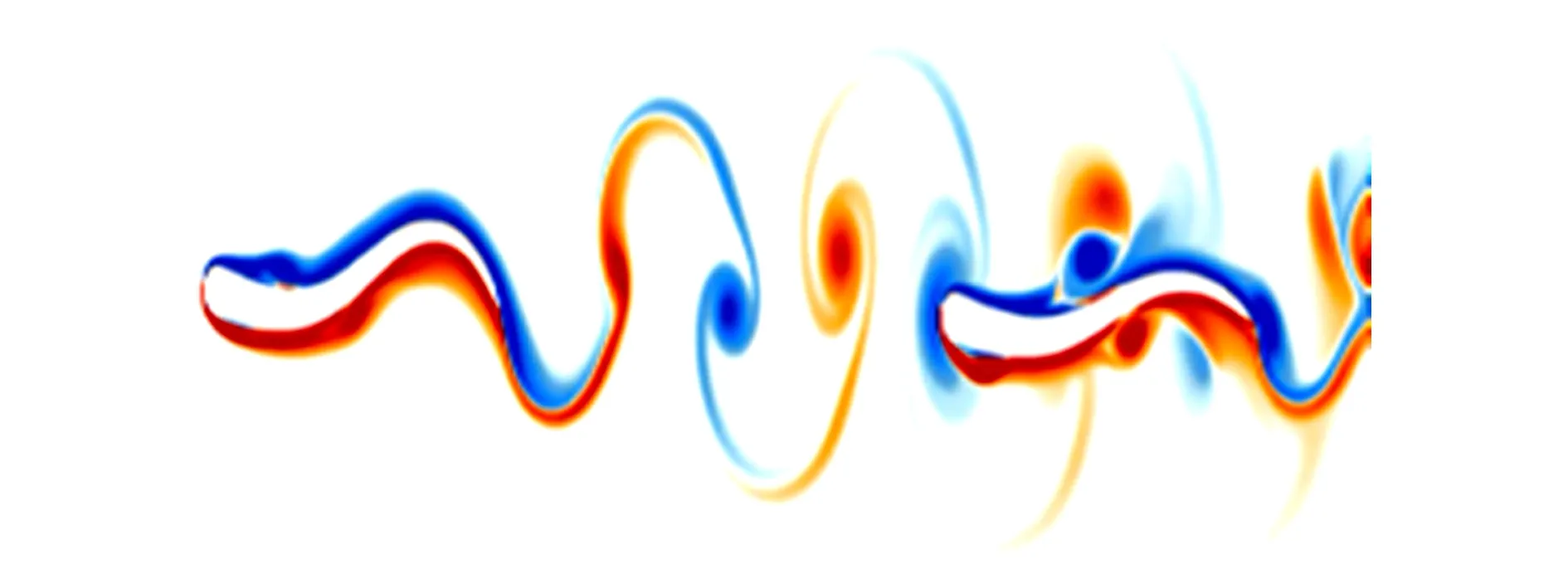
圖1 數值模擬魚群游動產生的渦系圖[10]
為研究魚群的空間布局和集群運動能量消耗之間的關系。Chen等[11]使用數值仿真了魚群中不同距離成員之間的水動力相互作用。仿真使用3個魚體進行,通過調節魚體之間的橫向和縱向距離來尋求魚群間的最佳空間布局。圖2為魚群的空間排列示意圖,其中L代表魚的長度,D代表前魚與后魚之間的橫向距離,S代表前魚與后魚之間的縱向距離。
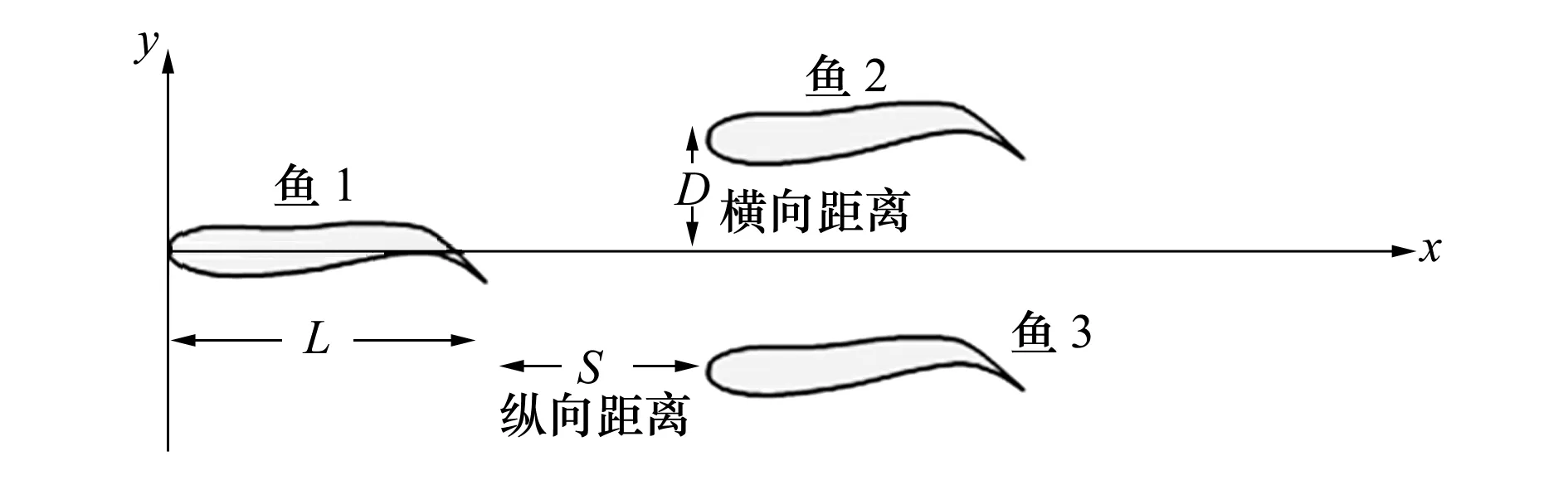
圖2 魚群排列示意圖[11]
研究表明,魚群運動時,在身體波動周期的特定時刻,2條魚之間產生的低壓區域能夠被動地幫助魚頭部轉動和尾部跳動;目前魚渦流的側向力也有利于魚頭的波動。
西北工業大學潘光等[12]通過對蝠鲼的觀測得到:蝠鲼在運動過程中并不是始終進行主動拍動,而是采用間歇式運動策略,即滑翔加主動推進策略,此種策略可以大大降低能耗,提高效率。為揭示蝠鲼推進狀態的游動機理,針對蝠鲼大變形時流場模擬及水動力計算問題,該團隊研究者[13]在格子Boltzmann方法框架下,采用浸入邊界法處理物理模型邊界,近場動力學法求解結構動力響應。得到蝠鲼游動的流場數值模擬如圖3所示。該研究不僅對蝠鲼群游高效節能機理有了一定的了解,同時對未來新型航行器模型的研制、實驗研究及編隊航行群體智能協調控制有一定的參考和指導意義。

圖3 蝠鲼流場渦系圖[13]
以上研究利用數值模擬的方法討論了生物運動產生的流場結構,以具體的流場結構參數揭示了生物集群運動的節能機理。研究表明,以集群方式運動的生物會主動穿越隊形中前方個體產生的流場壓力最小區域,并給出了集群運動的空間布局和能量消耗之間的關系。這些研究為水下仿生機器人集群節能協同控制提供了可靠的設計參數。
2 水下流場信息感知技術研究現狀
在生物集群運動過程中,個體的路徑選擇只能依靠有限的周圍流場信息獲得[14]。因此,得到水下仿生機器人周圍流場分布特征,對水下仿生機器人集群運動參數和路徑選擇具有重要意義。
生物學研究發現,魚類利用分布在身體表面的大量感受器進行環境檢測。這些感受器可以幫助魚類識別周圍水壓變化,從而幫助魚類進行避障,捕食和追蹤等行為。
2.1 人工側線感知陣列研究現狀
目前,基于仿生學理論,許多學者[15]已進行了人工側線領域的研究。Liu等[16]設計了一種微壓力傳感器組成的人工側線陣列。研究通過對載體的流體動力學模擬,得到了載體的壓力分布云,并從壓力云圖中找出載體的壓力敏感位置(如壓力最大值點、壓力最小值點和靜壓零點),從而找到布置傳感器的最佳位置。
在實際仿生器件中,還有一種基于塑性變形磁性組裝技術和微機電系統(micro-electro-mechanical system,MEMS)制造技術制作的微型傳感陣列[17],如圖4所示。
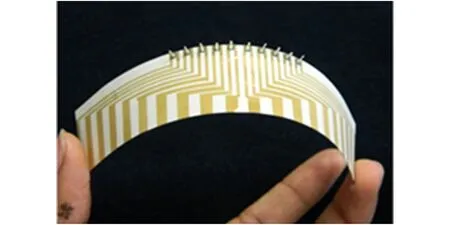
圖4 MEMS壓力傳感器示意圖[17]
水下仿生機器人集群在運動過程中產生的流場特征存在差別,且不同水下仿生機器人的特定動作可以產生特征流場。因此,人工側線系統有望通過流場感知間接地實現水下仿生機器人之間的協同交流。
2.2 基于人工側線的水下信息感知技術
在獲取水下仿生機器人多源數據后,需對復雜環境中的不同狀態信息進行處理。研究表明[18],魚可利用感知到的流場信息估算水的流速、方向,實現不同游動狀態下的順流,從而降低能量消耗。而人工側線系統能夠將陣列傳感信號轉化為流場信息和機器人的運動狀態信息,實現機器人的順流運動。
北京大學謝廣明等[19]設計了基于壓力傳感器陣列原理的人工側線系統(如圖5所示),實現了機器魚不同運動狀態信息(機器魚游動速度、加速度、相鄰機器魚前后距離、相對橫向距離和相對角度等)的獲取。
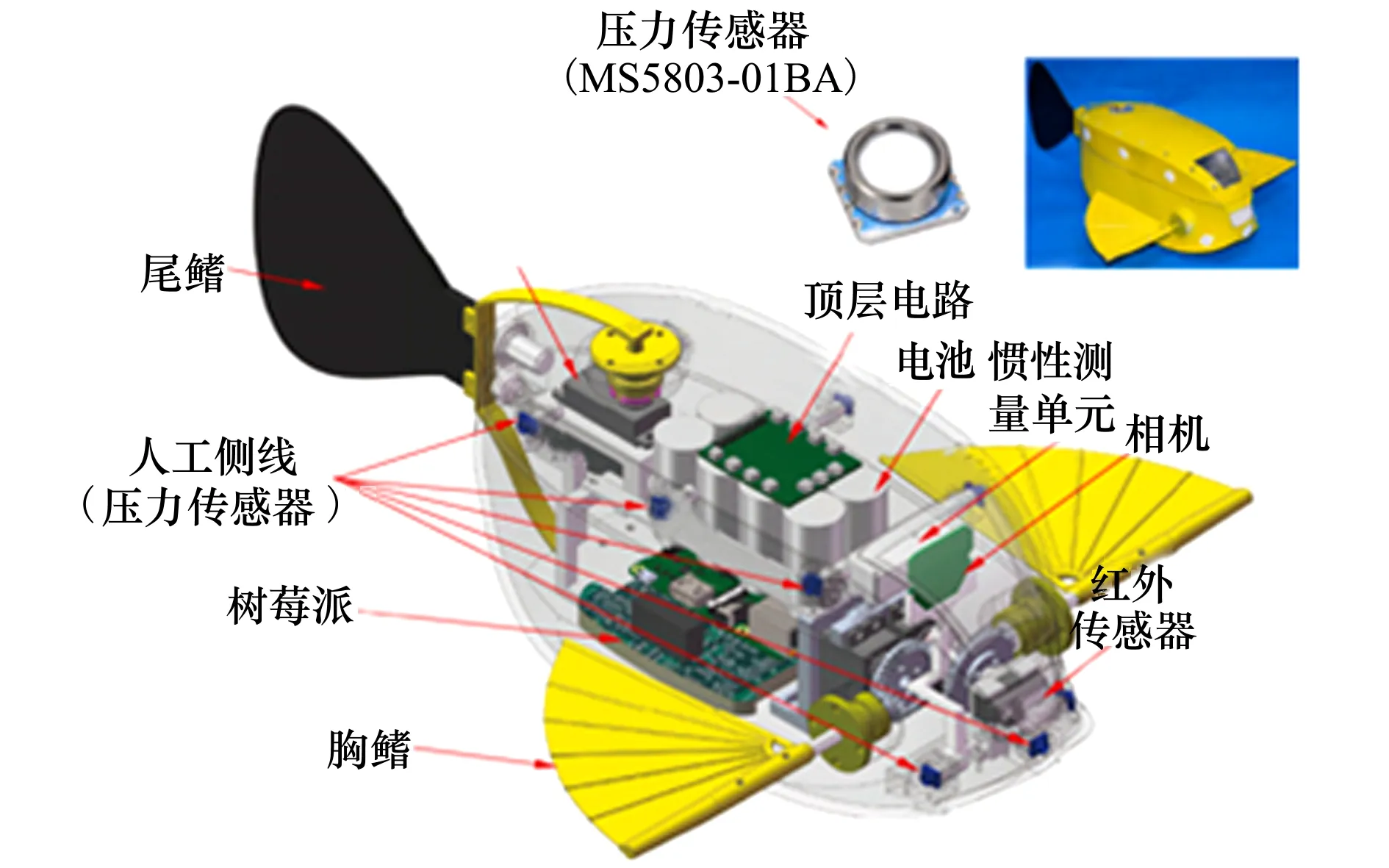
圖5 人工側線系統圖[19]
近年來也有學者通過分析人工側線陣列信號與流場力學模型的相關性以實現運動目標的識別和定位。Zhang等[20]提出了一種利用分布式壓力傳感器實現柔性機器魚速度閉環控制的算法。Free等[21]基于建立的流場模型和人工側線系統測量的流場信息研究了柔性機器魚的速度評估和位置控制。
目前,水下流場信息感知主要通過人工側線的方式實現,借鑒了魚類身體表面分布的感受器進行環境感知的模式。現有的人工側線陣列主要由分布在機器人身上的壓力傳感器組成,這種感知陣列只適應于身體變形較小的剛性機器人,對于水下柔性機器人,如仿蝠鲼機器人來說適應性較差。基于此,未來可研究適用于水下柔性機器人的新型人工側線傳感陣列。
3 水下仿生機器人集群控制研究現狀
集群行為是由個體間相對簡單的局部自組織交互產生的一種涌現現象。集群中的個體通過對鄰居的距離、速度、方位、能耗等因素的綜合評判,更新水下仿生機器人集群信息交互規則,從而得到水下仿生機器人集群控制方法。
3.1 水下仿生機器人單體運動控制方式
水下仿生機器人常用的運動控制方式主要有基于模型的控制方法、正弦控制器方法和基于中樞模式發生器(CPG)的控制方法。水下仿生機器人單體運動控制方法綜述如表1所示。
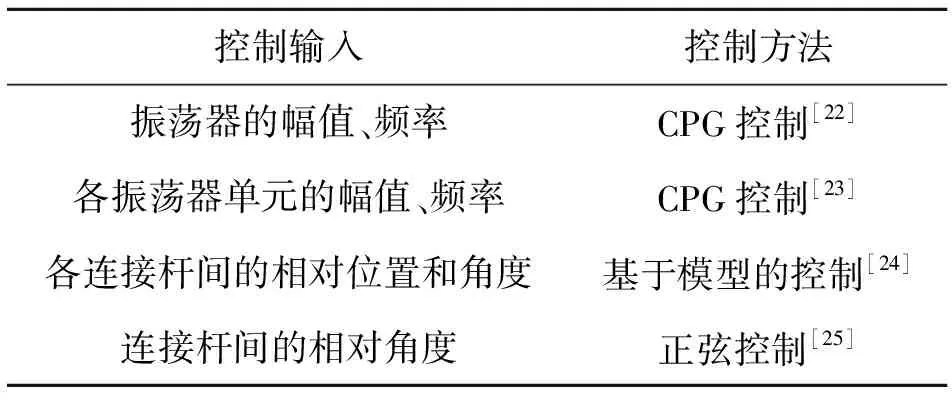
表1 水下仿生機器人單體運動控制綜述
基于模型的控制方法是建立在明確水下機器人的運動學和動力學基礎上的一種控制方法,該方法可實現精準的運動控制。然而,不同于空氣中的機器人,水下機器人工作環境復雜,干擾因素多,使得其精準建模極其困難。因此使用基于模型的控制方法實現水下仿生機器人的運動控制魯棒性不佳。
正弦控制器方法雖然是水下仿生機器人運動控制方法中常用的一種控制方法,但當其控制參數(如頻率、振幅)發生突變時,易導致關節角產生不連續的跳變,靈活性較差。同時,正弦控制器方法較難引入外部反饋信號,穩定性較差。
基于CPG的控制方法是通過模仿生物節律運動的控制機理。CPG是一種神經網絡,可以產生穩定的周期信號,其周期信號的產生不依賴高級神經中樞,也不依賴外部反饋信息,由其自身特性而決定。CPG控制方法能夠實現水下仿生機器人各狀態間的平滑切換。
Ijspeert等[22]成功將CPG控制方法應用于仿蠑螈兩棲機器人。Ijspeert改進后的相位振蕩器模型可以獨立控制振幅和相位差,建立了CPG網絡模型。整個控制系統只有一個輸入參數d,通過改變參數d的大小,調節機器人所表現出的速度、方向和運動模式。
曹勇等[23]利用CPG振蕩器實現了仿蝠鲼機器人不同狀態的運動控制,如圖6所示。根據蝠鲼生物的觀察分析,該水下仿蝠鲼機器人由對稱胸鰭及尾鰭構成。實驗證明了此CPG控制方法可以實現水下仿生機器人不同狀態的運動控制,其各狀態之間可實現平滑切換。
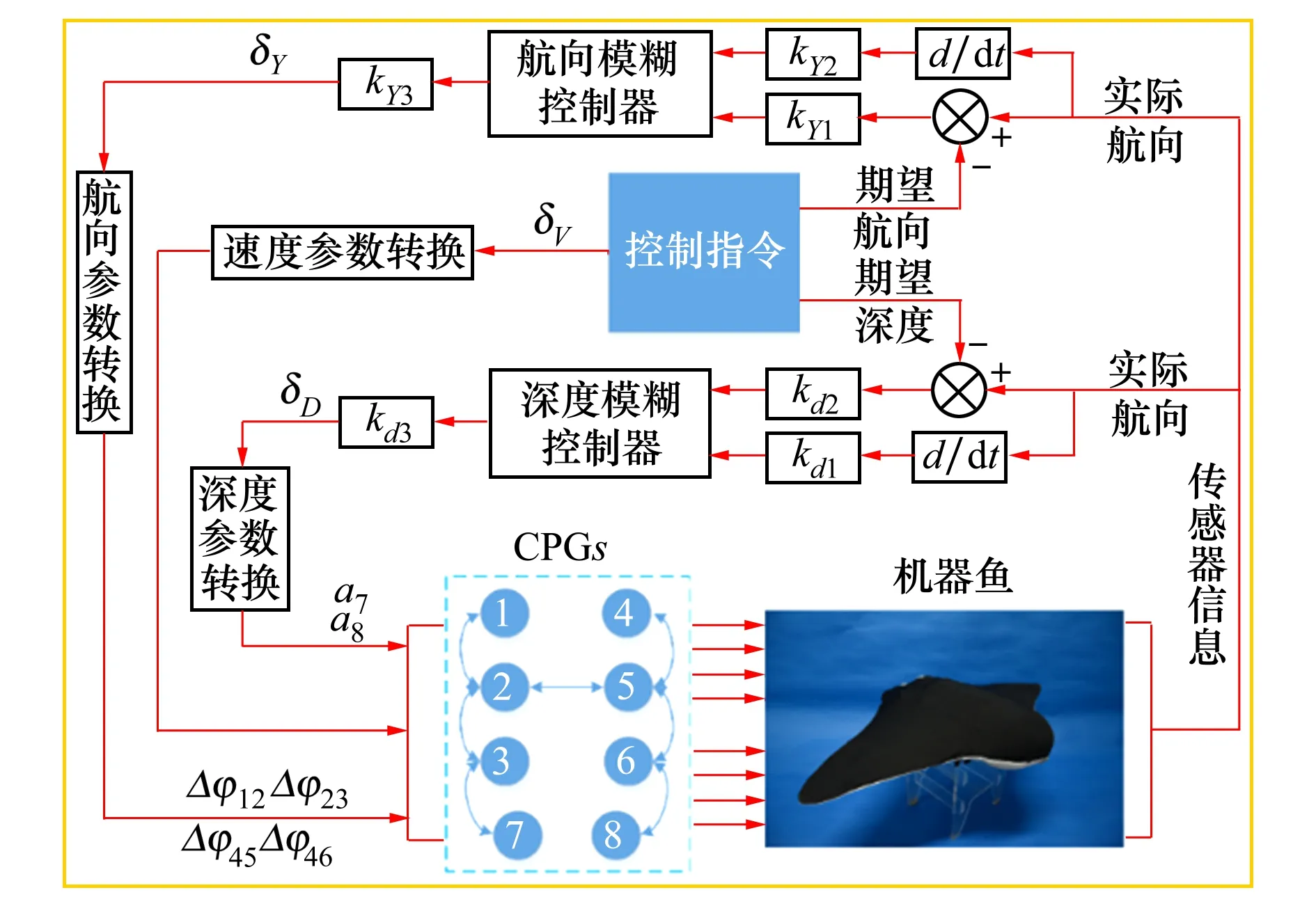
圖6 仿蝠鲼機器人CPG運動控制[23]
3.2 集群主要控制方式
1) 編隊控制
目前,編隊控制主要的研究方法有:領航者-跟隨者方法[26],Kumar等[27]首次提出該方法,利用反饋線性化的方法設計了編隊控制律,并證明了其穩定性;基于行為的方法[28],該方法是指通過設計許多基本行為驅使多機器人系統形成編隊的同時運動到期望的位置,且運動過程中可以避障;虛擬結構法[29],其基本思路為:將多機器人系統的編隊看作虛擬的剛性結構,每個機器人可看成是剛性結構上相對位置固定的一點。此外,人工勢場法、圖論法等方法也多用于集群編隊控制。
Jia等[30]結合一致性算法和勢函數,提出了一種領導者-跟隨者結構的集群編隊算法,用于機器魚系統執行群體任務,并通過實驗證明了算法有效性。多水下仿生機器人編隊控制方法綜述如表2所示。
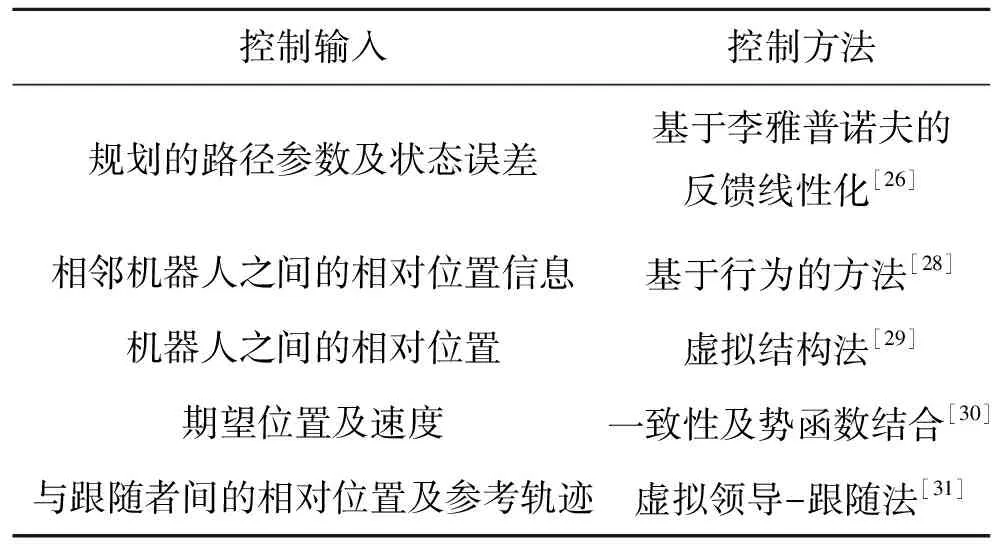
表2 多水下仿生機器人編隊控制方法綜述
2) 避障控制
生物集群在空間上一分為多的行為可實現對障礙物/危險的有效規避。劉明雍等[32]提出了一種“非平均化”的個體速度協同機制,利用信息熵定義了一種融合鄰居速度、距離、數量及自身感知半徑的綜合性評價指標,實現了外部刺激作用下群集的自組織分群運動。
Jia等[35]提出了一種基于勢函數和行為規則的控制算法。在控制律設計時,將目標視為吸引物體,障礙物視為排斥物體,在障礙物環境的安全區、避障區和危險區分別設計控制律。最終通過數值仿真表明3個水下機器人能夠在短時間內自主避開障礙物,并隨編隊在安全區域運動。
多水下仿生機器人避障控制方法綜述如表3所示。
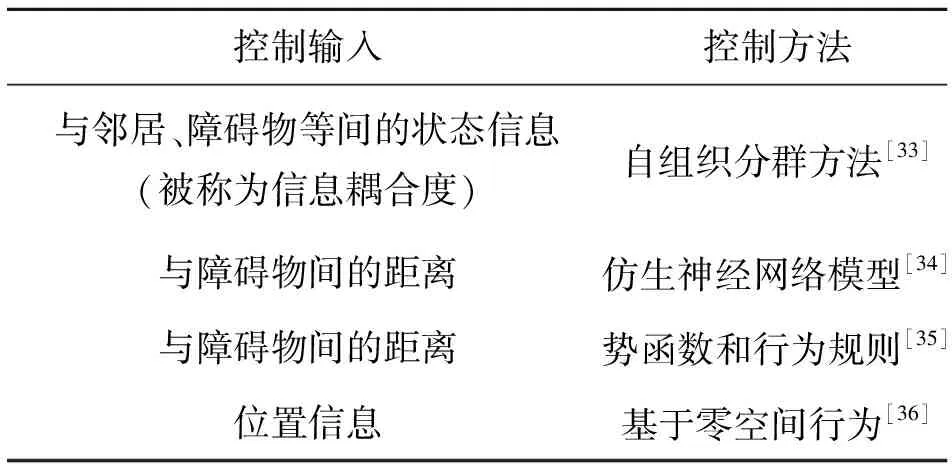
表3 多水下仿生機器人避障控制方法綜述
3.3 基于節能機理的控制方式
能量有效利用一直是水下機器人研究的重點內容。通過對生物集群運動的節能機理研究可知,在空氣或者水流環境中運動的生物群體會利用運動產生的流場降低自身的前進阻力。近年來,有學者也在相關領域做了研究[37-38]。
北京大學謝明團隊致力于研究魚群在運動時如何利用有益的水動力相互作用。文獻[38]以仿生機器魚為實驗平臺,通過直接測量集群運動的功耗,得出了節省能量的行為準則。該研究提供了一種簡單、穩健的控制策略,可作為一個設計原則,提高魚狀水下機器人的集體游泳效率。
付等[39]通過實驗建立了機器魚在流場環境下不同游動姿態與能量消耗之間的對應關系。該研究利用強化學習算法對流場中魚體能量消耗最小的游動姿態進行優化,實現了集群運動能量的節省。
基于節能機理的水下仿生機器人控制綜述如表4所示。
現有典型的集群模型都有了較成熟的發展,這些模型都能使集群中的個體出現一致運動,具有典型的集群運動特征。同時,集群編隊控制方面的理論研究也已有較成熟的發展。這些研究都能夠為制定集群節能控制策略提供參考。然而,在現有研究及理論基礎上,如何設計結合流場特征、水下仿生機器人間狀態等參數的控制方法,是未來實現水下仿生機器人集群節能控制需要解決的問題。
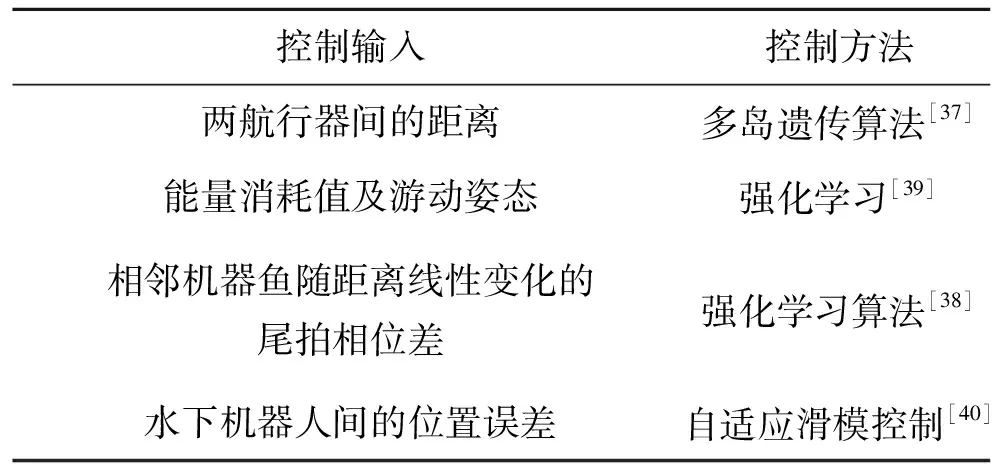
表4 基于節能機理的水下仿生機器人控制綜述
4 水下仿生機器人集群節能研究面臨的挑戰及發展趨勢
本文對水下仿生機器人集群節能關鍵技術(生物集群運動的節能機理、水下流場信息感知技術、水下集群控制)進行了綜述。由于水下環境的復雜性和不確定性,在考慮水動力對水下仿生機器人集群運動有益作用方面的研究較少。因此,水下仿生機器人集群節能關鍵技術還面臨著很大的挑戰。
1) 獲取水下仿生機器人運動時流場分布特征。研究表明,魚群游動時,魚尾擺動所誘導的渦系會相互干擾,從而改變流場結構。要明確流場結構的變化規律,首要的問題是如何通過數值模擬的方法呈現出水下仿生機器人集群運動過程中的流場結構變化。
目前有關水下流場數值模擬多集中于剛性的數值模擬研究,對柔性集群運動的流場數值模擬研究較少。未來研究可提出水下柔性機器人運動時的流場數值模擬方法,以揭示各運動參數(振幅、頻率、波數等)對個體水動力特性的影響;進而提出柔性集群在不同編隊運行時的流場數值模擬方法;分析柔性集群運動時周圍流場中渦系的空間和時間演化與后方個體表面壓力分布、與周圍個體的實時相對位姿的相互影響規律;從游動阻力、航行距離等方面綜合分析集群運動節能效率,從而獲得最優的編隊隊形及相應的間距和運動姿態等參數。
2) 建立流場信息與水下仿生機器人運動狀態之間的關系。現有對水下流場信息的感知技術主要有人工側線系統。然而,由于水下仿生機器人個體面積小、機動靈活等特點,一般用于水下航行器的傳感模塊都無法用于水下仿生機器人。因此,設計適用于水下仿生機器人的人工側線感知系統是開展后續工作的基礎也是所面臨的挑戰;其次,獲取水下多源環境數據后,如何在復雜環境中開展多模信息感知,揭示水下仿生機器人運動過程中的流場方位、表面壓強、運動參數之間的耦合關系是流場信息感知技術的另一大挑戰。
目前神經網絡等機器學習算法已經開始應用于水下復雜信息的處理。未來研究可利用人工智能技術對水下仿生機器人集群運動過程中的航向姿態、水中流場渦系和壓力分布進行機器學習以獲取流場分布;利用卷積神經網絡解決水下多模態信息感知與認知所面臨的復雜流場、環境觀測信息與集群位姿之間強耦合的非線性約束問題。
3) 設計基于節能機理的水下仿生機器人集群控制策略。目前,典型的集群模型有Couzin模型、Vicsek模型等。這些模型都能使集群中的個體出現一致運動,具有典型的集群運動特征。同時,集群編隊控制方面的理論研究也已有較成熟的發展。這些研究都能夠為制定集群節能控制策略提供參考。然而,如何在現有研究及理論基礎上,設計結合流場特征、水下機器人間狀態等參數的控制方法,是實現水下仿生機器人集群節能控制的重要挑戰。
目前基于網絡拓撲結構的機器人集群控制技術已得到了一定程度的發展,但多集中于陸地或空中的機器人集群編隊控制。亟需開展水下機器人集群節能控制技術研究。未來發展可結合水下流場特征、機器人間的狀態信息等參數,分析水下仿生機器人集群協同的信息傳播機制,建立新的集群節能模型和集群節能控制策略,最終實現水下仿生機器人集群節能控制。
5 結 論
本文綜述了近年來水下仿生機器人集群節能關鍵技術的國內外發展現狀,分析了水下仿生機器人集群節能關鍵技術所面臨的挑戰,并提出了未來發展趨勢。水下仿生機器人集群節能關鍵技術研究為其實現工程應用奠定了基礎,且此基礎研究涉及學科范圍較廣、創新性較強,這些關鍵技術若能突破,將促進我國水下仿生機器人領域進入更前沿時代。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
兒童故事畫報(2019年5期)2019-05-26 14:26:14
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12