基于MCMC的無(wú)線傳感器網(wǎng)絡(luò)目標(biāo)定位算法
2022-07-21 04:11:16張沛朋李冬鋒
計(jì)算機(jī)工程與設(shè)計(jì) 2022年7期
張沛朋,李冬鋒
(1.濟(jì)源職業(yè)技術(shù)學(xué)院 藝術(shù)設(shè)計(jì)系,河南 濟(jì)源 459000; 2.華北水利水電大學(xué) 信息工程學(xué)院,河南 鄭州 450045)
0 引 言
由于在智能交通、目標(biāo)跟蹤等軍事和民用領(lǐng)域的廣泛應(yīng)用,基于時(shí)延-多普勒頻率的無(wú)線傳感器網(wǎng)絡(luò)(wireless sensor networks,WSN)目標(biāo)定位問(wèn)題近年來(lái)備受關(guān)注[1-4]。針對(duì)該問(wèn)題,現(xiàn)有算法可分成兩類:兩步定位和直接定位(direct position determination,DPD)。兩步定位的基本框架是:第一步從接收信號(hào)中提取時(shí)延[5,6]和多普勒[7,8]參數(shù);第二步基于時(shí)延-多普勒,估計(jì)目標(biāo)位置參數(shù)[7,8]。兩步定位會(huì)損失一部分有用信息,導(dǎo)致最終目標(biāo)定位誤差增大,特別是在信噪比或信號(hào)采樣點(diǎn)數(shù)較低時(shí)。近年來(lái),隨著通信帶寬和芯片計(jì)算能力的提升,直接定位開始得到關(guān)注,并發(fā)展出一系列有效算法[9-15],這類直接定位算法的思路是從接收信號(hào)中直接估計(jì)出目標(biāo)位置參數(shù),無(wú)需提取中間定位參數(shù),避免了額外的信息損失,因此比傳統(tǒng)兩步定位具有更高的精度和穩(wěn)健性。然而,上述直接定位算法[9-15]存在計(jì)算復(fù)雜度過(guò)高、初值依賴和局部收斂問(wèn)題,特別是對(duì)于目標(biāo)位置-速度估計(jì)這樣的高維問(wèn)題求解。
為提高基于時(shí)延-多普勒的WSN目標(biāo)定位的精度、穩(wěn)健性和計(jì)算效率,本文提出一種基于馬爾科夫鏈-蒙特卡羅(Markov-chain Monte-Carlo,MCMC)[16-18]的直接定位算法。首先從傳感器接收信號(hào)中推導(dǎo)目標(biāo)位置和速度估計(jì)的優(yōu)化函數(shù),然后將其轉(zhuǎn)化為目標(biāo)位置和速度的分布函數(shù),利用MCMC方法對(duì)分布函數(shù)抽樣,通過(guò)統(tǒng)計(jì)樣本均值得到目標(biāo)位置和速度估計(jì)值。最后通過(guò)計(jì)算機(jī)仿真實(shí)驗(yàn)將估計(jì)結(jié)果與現(xiàn)有算法對(duì)比,突出本文算法的性能優(yōu)勢(shì)。
1 定位場(chǎng)景與信號(hào)模型
本文考慮的WSN運(yùn)動(dòng)目標(biāo)定位場(chǎng)景如圖1所示。

圖1 WSN目標(biāo)定位場(chǎng)景

根據(jù)上述場(chǎng)景假設(shè),目標(biāo)與傳感器節(jié)點(diǎn)m在第k個(gè)時(shí)隙內(nèi)的距離及其變化率可以表示為
(1)
(2)

rm,k(t)=am,kxk(t-τm,k)eι2πfm,kt+wm,k(t)
(3)

假設(shè)以頻率fs對(duì)各傳感器接收信號(hào)進(jìn)行采樣,得到式(3)的離散形式如下
rm,k(n)=am,kxk(n-τm,kfs)eι2πfm,kn/fs+wm,k(n)
(4)
式中:n=0,1,…,N-1,N為每個(gè)時(shí)隙內(nèi)的采樣點(diǎn)數(shù)。
定義如下向量
n=[0,1,…,N-1]T
(5)
rm,k=[rm,k(0),rm,k(1),…,rm,k(N-1)]T
(6)
xk=[xk(0),xk(1),…,xk(N-1)]T
(7)
Dm,k=diag{eι2πfm,kn/fs}
(8)
Γm,k=diag{e-ι2πfsnτm,k/N}
(9)
F=[e-ι2π(0)n/N,e-ι2π(1)n/N,…,e-ι2π(N-1)n/N]T
(10)
wm,k=[wm,k(0),wm,k(1),…,wm,k(N-1)]T
(11)
則傳感器節(jié)點(diǎn)m在第k個(gè)時(shí)隙內(nèi)接收到的目標(biāo)基帶信號(hào)可以表示為如下的向量形式
rm,k=am,kHm,kxk+wm,k
(12)
其中,Hm,k=Dm,kFHΓm,kF,m=1,2,…,M,k=1,2,…,K。

2 基于MCMC的直接定位算法
為了以較低的計(jì)算復(fù)雜度實(shí)現(xiàn)對(duì)目標(biāo)位置和速度的估計(jì),本節(jié)提出一種基于MCMC的直接定位算法。算法具體過(guò)程如下。
2.1 直接定位優(yōu)化函數(shù)構(gòu)建
(13)

(14)
式(14)中的未知參量中,含有冗余參數(shù)am,k, 其最大似然估計(jì)為
(15)

(16)

(17)

(18)
那么,目標(biāo)位置和速度的估計(jì)可以通過(guò)式(18)中目標(biāo)函數(shù)的極大化得到。
2.2 目標(biāo)位置參數(shù)求解

2.2.1 優(yōu)化函數(shù)全局最大化
根據(jù)Pincus提出的優(yōu)化理論[19],式(18)中θ的估計(jì)問(wèn)題可以轉(zhuǎn)化為如下積分形式
(19)

(20)


(21)
根據(jù)伯努利大數(shù)定律,當(dāng)隨機(jī)樣本數(shù)量Ns足夠大時(shí),式(21)的數(shù)值運(yùn)算結(jié)果即可收斂至式(19)積分結(jié)果。至此,積分問(wèn)題被轉(zhuǎn)化為了從概率密度函數(shù)pρ(θ) 中產(chǎn)生隨機(jī)樣本,也即pρ(θ) 的抽樣問(wèn)題。然而,由于pρ(θ) 的形式比較復(fù)雜,因此要從pρ(θ) 抽取樣本并不容易,而MCMC方法就是為此目的而誕生的。
2.2.2 MCMC方法
MCMC方法由兩個(gè)MC組成:第一個(gè)“MC”為“馬爾科夫鏈(Markov Chain)”縮寫,意為利用馬爾科夫鏈從目標(biāo)分布中抽樣;第二個(gè)“MC”為“蒙特卡羅(Monte Carlo)”縮寫,意為根據(jù)抽取的樣本,利用蒙特卡羅方法對(duì)積分進(jìn)行計(jì)算。具體來(lái)說(shuō),在MCMC方法中,首先建立一個(gè)馬爾科夫鏈,使得目標(biāo)分布pρ(θ) 為其平穩(wěn)分布p(θ), 即p(θ)=pρ(θ), 然后運(yùn)行此馬爾科夫鏈充分長(zhǎng)時(shí)間直至其收斂至平穩(wěn)分布p(θ), 那么從達(dá)到平穩(wěn)分布的馬爾科夫鏈中產(chǎn)生樣本,即可實(shí)現(xiàn)對(duì)目標(biāo)分布pρ(θ) 的抽樣。Metropolis-Hastings抽樣是一類常用的構(gòu)造馬爾科夫鏈的方法,包括了Metropolis抽樣、Gibbs抽樣等。對(duì)于一維隨機(jī)變量θ, Metropolis抽樣的基本流程如下:
(1)構(gòu)造提議分布q(·|θ(l));
(2)在待估參數(shù)空間內(nèi)初始化馬爾科夫鏈的狀態(tài)θ(0);
(3)對(duì)于l=0,1,2,…,重復(fù)以下過(guò)程進(jìn)行抽樣:
1)從提議分布q(·|θ(l)) 中產(chǎn)生候選狀態(tài)θ*;
2)生成均勻分布隨機(jī)數(shù)u~(0,1);
3)若u<α(θ(l),θ*), 其中α(θ(l),θ*) 為接受概率
(22)
則將馬爾科夫鏈狀態(tài)轉(zhuǎn)移至候選狀態(tài),即令θ(l+1)=θ*; 否則馬爾科夫鏈維持當(dāng)前狀態(tài),即令θ(l+1)=θ(l)。
4)增加l, 返回到步驟1)。
上述過(guò)程中,提議分布q(·|θ(l)) 應(yīng)為一個(gè)程序可抽樣的分布,通常可用隨機(jī)游走法構(gòu)造。隨機(jī)游走法假設(shè)候選狀態(tài)θ*從一個(gè)對(duì)稱的提議分布q(θ*|θ(l)) 中產(chǎn)生,即在每一次迭代中,從提議分布中產(chǎn)生增量Δθ,然后令θ*=θ(l)+Δθ。 典型地,可用高斯分布產(chǎn)生增量Δθ, 此時(shí)候選狀態(tài)服從高斯分布θ*~增量方差對(duì)生成馬爾科夫鏈的效果有重要影響。一般來(lái)說(shuō),增量方差過(guò)大,會(huì)導(dǎo)致大部分候選樣本被拒絕,此時(shí)算法效率很低。如果增量方差過(guò)小,則候選樣本幾乎都被接受或拒絕,鏈幾乎不再游走,同樣效率較低。一般來(lái)說(shuō),接受率在0.5~0.85才能保證得到的馬爾科夫鏈具有較好的性質(zhì)[20]。為此,可以設(shè)置增量方差的調(diào)節(jié)參數(shù),并在游走過(guò)程中監(jiān)視馬爾科夫鏈的接受率,以使算法達(dá)到預(yù)設(shè)的接受率。


(23)
(24)
生成均勻分布隨機(jī)數(shù)u~(0,1): 若令否則令
2.2.3 基于MCMC的目標(biāo)位置參數(shù)求解
基于上述MCMC方法,對(duì)于本文WSN目標(biāo)定位問(wèn)題,待估參數(shù)為目標(biāo)位置和速度參數(shù)構(gòu)成的2dim×1維列向量,因此本文采用Gibbs抽樣生成馬爾科夫鏈,采用隨機(jī)游走法構(gòu)造提議函數(shù)。算法具體實(shí)現(xiàn)過(guò)程如下:
(1)設(shè)置狀態(tài)轉(zhuǎn)移次數(shù)閾值Nb(保證馬爾科夫鏈?zhǔn)諗?,需要的樣本數(shù)量Ns;
(3)令l=0,j=1, 重復(fù)如下抽樣過(guò)程:
1)利用隨機(jī)游走法構(gòu)造提議分布
(25)

4)生成隨機(jī)數(shù)u~(0,1):

5)調(diào)整隨機(jī)游走步長(zhǎng):


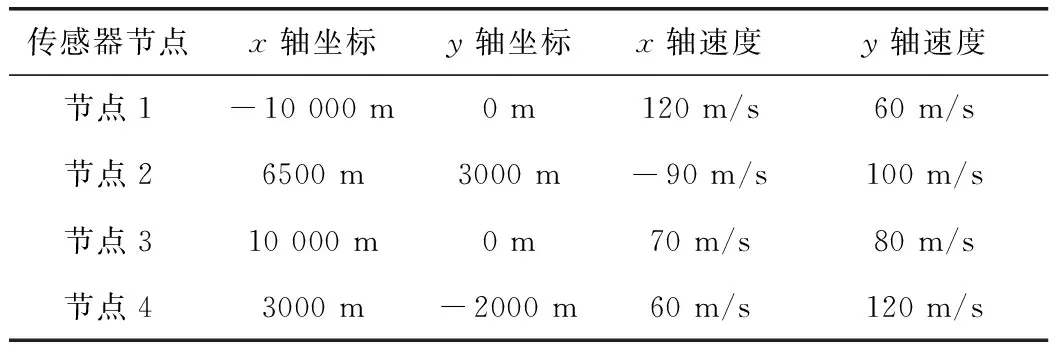
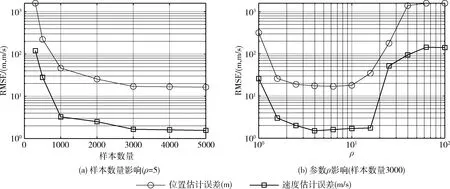
6)如果j 7)如果l (4)根據(jù)抽取的樣本θ(0),θ(1),…,θ(Nb+Ns), 估計(jì)目標(biāo)位置和速度參數(shù)的估計(jì)值 (26) (27) 其中, Re(·) 和Im(·) 分別表示復(fù)數(shù)的實(shí)部和虛部。那么,由式(13)中向量r的概率密度函數(shù),可得待估參數(shù)的Fisher信息矩陣為 (28) 式中:H表示矩陣共軛轉(zhuǎn)置運(yùn)算。根據(jù)待估參量φ的構(gòu)成,偏導(dǎo)矩陣?r/?φT可以表示為 (29) 根據(jù)復(fù)變函數(shù)求導(dǎo)規(guī)則,式(29)右側(cè)子矩陣可以表示為 (30) (31) J2=diag{J2,1,J2,2,…,J2,K} (32) J2,k=diag{H1,kxk,H2,kxk,…,HM,kxk} (33) (34) (35) Λ1=ι2πdiag{n} (36) (37) (38) (39) (40) (41) (42) (43) 根據(jù)克拉美羅界的定義,待估參量φ的CRLB為Fisher信息矩陣的逆,即 CRLB(φ)=[FIM(φ)]-1 (44) (45) 載頻fc=10 MHz。 目標(biāo)信號(hào)能夠同時(shí)被WSN的M=4個(gè)傳感器節(jié)點(diǎn)所接收。每個(gè)傳感器節(jié)點(diǎn)在K=50個(gè)時(shí)隙段對(duì)目標(biāo)輻射的電磁信號(hào)進(jìn)行接收和采樣,采樣頻率為fs=1 MHz, 每個(gè)時(shí)隙段持續(xù)時(shí)間為T=1 ms, 接收信號(hào)的幅度am,k=1。 WSN各傳感器節(jié)點(diǎn)的位置和速度見(jiàn)表1。為了模擬實(shí)際的信號(hào)數(shù)據(jù),我們?yōu)楦鱾鞲衅鞴?jié)點(diǎn)接收信號(hào)添加零均值的高斯白噪聲,噪聲方差根據(jù)仿真實(shí)驗(yàn)場(chǎng)景調(diào)整。 算法的估計(jì)性能通過(guò)500次獨(dú)立計(jì)算機(jī)仿真實(shí)驗(yàn)統(tǒng)計(jì)得到的目標(biāo)位置和速度均方根誤差(root mean square error,RMSE)來(lái)衡量,定義如下 (46) (47) 表1 傳感器節(jié)點(diǎn)位置和速度 首先,為了直觀展示本文所提算法的有效性,我們?cè)O(shè)置噪聲方差σ2=1, 然后利用本文所提算法對(duì)目標(biāo)進(jìn)行定位,算法的目標(biāo)函數(shù)如圖2所示。 圖2 目標(biāo)函數(shù) 從圖2(a)可以看出,目標(biāo)信號(hào)在其真實(shí)位置參數(shù)處得到峰值,并且得益于多個(gè)時(shí)隙的長(zhǎng)時(shí)間信號(hào)能量積累,原本淹沒(méi)在噪聲中的目標(biāo)信號(hào)數(shù)據(jù)積累后的峰值遠(yuǎn)高于周圍噪聲。從圖2(b)中可以看到,通過(guò)調(diào)整參數(shù)ρ的值,目標(biāo)函數(shù)的峰值被進(jìn)一步強(qiáng)化,噪聲被一定程度抑制,這將有利于后續(xù)MCMC方法抽樣。 本文算法利用MCMC方法抽取樣本的效果如圖3所示。 圖3 MCMC方法抽樣(ρ=5) 從圖3中生成的馬爾科夫鏈可以看到,抽樣過(guò)程開始后,隨機(jī)游走的增量方差較大,體現(xiàn)在馬爾科夫鏈的路徑步長(zhǎng)較大。較大的步長(zhǎng)有利于馬爾科夫鏈迅速遍歷參數(shù)空間,并快速收斂至平穩(wěn)分布。收斂至平穩(wěn)分布后,馬爾科夫鏈的樣本在目標(biāo)位置參數(shù)附近游走,步長(zhǎng)較小。對(duì)生成樣本統(tǒng)計(jì)發(fā)現(xiàn),MCMC抽樣的接受率在0.7左右,說(shuō)明了生成馬爾科夫鏈具有較好的性質(zhì)。 如上文所示,本文所提算法涉及到的兩個(gè)重要參數(shù)——樣本數(shù)量和參數(shù)ρ。接下來(lái)通過(guò)仿真實(shí)驗(yàn)分析樣本數(shù)量和參數(shù)ρ對(duì)定位精度的影響。仿真實(shí)驗(yàn)結(jié)果如圖4所示。 圖4 MCMC方法參數(shù)對(duì)定位精度的影響 首先,為定量分析樣本數(shù)量對(duì)目標(biāo)定位精度的影響,并確定樣本數(shù)量的最優(yōu)選取,我們統(tǒng)計(jì)了不同樣本數(shù)量下的目標(biāo)位置和速度估計(jì)RMSE,結(jié)果如圖4(a)所示。從圖4(a)可以看到,與直觀預(yù)期一致,整體上隨著樣本數(shù)量的增加,目標(biāo)位置和速度估計(jì)的RMSE呈下降趨勢(shì)。然而,當(dāng)樣本數(shù)量增加至3000以后,目標(biāo)位置和速度估計(jì)的RMSE下降速度趨近于0,此時(shí)再增加樣本數(shù)量將無(wú)法顯著提高目標(biāo)位置和速度的估計(jì)精度,反而會(huì)增加計(jì)算復(fù)雜度。因此,對(duì)于本文所設(shè)置的定位場(chǎng)景,樣本數(shù)量設(shè)置為3000為宜,后續(xù)仿真實(shí)驗(yàn)亦如此設(shè)置。 然后,為了確定參數(shù)ρ的合理取值,我們?cè)诓煌膮?shù)ρ下進(jìn)行定位仿真,并統(tǒng)計(jì)目標(biāo)位置和速度估計(jì)RMSE,結(jié)果如圖4(b)所示。從圖4(b)可以看到,在參數(shù)ρ的取值較小時(shí),與前文所述一致,增大參數(shù)ρ的值可以顯著提高目標(biāo)位置和速度的估計(jì)精度,這是因?yàn)橐粋€(gè)較大的ρ可以抑制噪聲影響,使得目標(biāo)分布峰值更加尖銳,繼而使得生成樣本更加集中于目標(biāo)位置處;然而,當(dāng)參數(shù)ρ取值過(guò)大時(shí),也會(huì)導(dǎo)致目標(biāo)位置和速度的估計(jì)精度降低,這是因?yàn)閰?shù)ρ取值過(guò)大會(huì)導(dǎo)致目標(biāo)分布峰值過(guò)于尖銳,從而導(dǎo)致MCMC抽樣困難,并且參數(shù)ρ取值越大意味著指數(shù)運(yùn)算次數(shù)越高,計(jì)算復(fù)雜度越高。因此,對(duì)于本文定位場(chǎng)景,參數(shù)ρ取值為10左右為宜。后續(xù)仿真實(shí)驗(yàn)中設(shè)置為ρ=10。 接下來(lái),為了評(píng)估算法在不同信噪比條件下的定位性能,我們將各傳感器節(jié)點(diǎn)接收信號(hào)添加不同方差的噪聲,從而得到不同信噪比的接收信號(hào),并在不同的信噪比條件下利用本文算法進(jìn)行仿真定位實(shí)驗(yàn)。為了突出本文算法的定位性能,我們將現(xiàn)有5種算法,包括文獻(xiàn)[7]中傳統(tǒng)的兩步定位方法、文獻(xiàn)[9]中基于網(wǎng)格搜索的直接定位算法(DPD-GS)、文獻(xiàn)[13]中基于期望最大化的直接定位算法(DPD-EM)、文獻(xiàn)[14]中基于粒子濾波的直接定位算法(DPD-PF)、文獻(xiàn)[15]中基于改進(jìn)粒子濾波的直接定位算法(DPD-MPF),作為對(duì)比算法。對(duì)比結(jié)果如圖5所示。 圖5 不同信噪比條件下算法的定位精度比較 圖5中結(jié)果表明,隨著接收信號(hào)信噪比的提升,幾種算法的定位精度總體上也都隨之提升,但幾種算法的定位精度卻不盡相同。傳統(tǒng)的兩步定位算法由于其兩步處理體制會(huì)損失一部分信息,導(dǎo)致最終目標(biāo)位置和速度估計(jì)RMSE始終明顯高于其余幾種直接定位算法以及CRLB。DPD-GS算法通過(guò)網(wǎng)格搜索確定目標(biāo)位置和速度參數(shù),定位精度受到搜索網(wǎng)格大小的限制,在高信噪比條件下定位精度無(wú)法進(jìn)一步提高。DPD-EM算法通過(guò)期望最大化迭代算法確定目標(biāo)位置和速度參數(shù),在高信噪比條件下定位精度可以接近CRLB,但是當(dāng)信噪比較低時(shí),目標(biāo)位置和速度估計(jì)RMSE高于DPD-PF、DPD-MPF以及本文DPD-MCMC算法,這說(shuō)明了期望最大化算法作為一種局部最優(yōu)算法,在低信噪比條件下的穩(wěn)健性較差。DPD-PF算法和DPD-MPF算法的定位性能相當(dāng),總體上定位誤差略高于本文DPD-MCMC算法。本文DPD-MCMC算法的定位誤差要低于現(xiàn)有幾種算法,并且在一般的信噪比條件下定位精度可以達(dá)到CRLB。 算法的平均運(yùn)行時(shí)間也是衡量算法性能的重要指標(biāo)。因此,我們?cè)谙嗤挠?jì)算機(jī)仿真環(huán)境下比較了現(xiàn)有算法的平均運(yùn)行時(shí)間。計(jì)算機(jī)仿真環(huán)境配置如下:電腦Lenovo ThinkCentre M920t;內(nèi)存32 GB;處理器Intel I9-9900(8核,3.1 GHz);操作系統(tǒng)Win10 64位專業(yè)版;軟件:MATLAB R2019b。仿真結(jié)果見(jiàn)表2。 表2 算法計(jì)算復(fù)雜度比較 表2中6種算法的平均運(yùn)行時(shí)間比較結(jié)果表明,直接定位算法的計(jì)算復(fù)雜度要高于傳統(tǒng)的兩步定位算法,但是直接定位算法可以得到更高的定位精度。在幾種直接定位算法的比較中,本文DPD-MCMC算法的計(jì)算復(fù)雜度要顯著低于DPD-GS、DPD-PF、DPD-MPF算法,與DPD-EM算法相當(dāng)。這是由于本文DPD-MCMC算法通過(guò)MCMC方法獲取參數(shù)樣本,繼而利用樣本統(tǒng)計(jì)結(jié)果實(shí)現(xiàn)目標(biāo)位置和速度參數(shù)估計(jì)的方式,無(wú)需像DPD-GS算法那樣在多維空間內(nèi)進(jìn)行網(wǎng)格搜索,也無(wú)需像DPD-PF和DPD-MPF算法那樣產(chǎn)生大量粒子,有效降低了計(jì)算復(fù)雜度。需要指出的是,雖然本文DPD-MCMC算法在本文仿真環(huán)境下平均需要2.68 s時(shí)間才能估計(jì)出目標(biāo)位置和速度,但是利用更為專業(yè)和強(qiáng)大的計(jì)算平臺(tái),運(yùn)行時(shí)間有望進(jìn)一步縮短至可對(duì)目標(biāo)實(shí)時(shí)定位的程度。 本文提出了一種針對(duì)無(wú)線傳感器網(wǎng)絡(luò)的目標(biāo)直接定位方法。首先依據(jù)最大似然準(zhǔn)則推導(dǎo)了基于時(shí)延和多普勒頻率的運(yùn)動(dòng)目標(biāo)直接定位數(shù)學(xué)優(yōu)化模型。針對(duì)該模型以矩陣特征值的形式給出而難以解析求解的問(wèn)題,提出了一種基于馬爾科夫鏈-蒙特卡羅的數(shù)值求解方法。此外,本文推導(dǎo)了基于時(shí)延和多普勒頻率的無(wú)線傳感器網(wǎng)絡(luò)目標(biāo)定位克拉美羅界,從理論上分析了算法定位誤差的理論極限。計(jì)算機(jī)仿真實(shí)驗(yàn)結(jié)果表明:相比于傳統(tǒng)的兩步定位方法,本文算法具有更高的定位精度;相比于現(xiàn)有的直接定位算法,本文算法的計(jì)算復(fù)雜度更低,并且在一般信噪比條件下,定位性能能夠逼近克拉美羅界。3 克拉美羅界分析


4 仿真實(shí)驗(yàn)






5 結(jié)束語(yǔ)
