無人集裝箱碼頭數字孿生建模方法研究
2022-07-20 02:15:42楊宇奧武殿梁張入元
計算機仿真 2022年6期
楊宇奧,武殿梁,張入元
(上海交通大學機械與動力工程學院,上海,200240)
1 引言
碼頭是綜合考慮航道、水文氣候以及內陸腹地物流條件,利用河流或海洋建造的工程設施,是海上運輸和陸地運輸的連接點。碼頭系統結構復雜、前期投資大、建設周期長,使用計算機技術驗證碼頭系統規劃,可減少設計風險和人力、物力的浪費。
碼頭裝卸系統是多環節且相互平行的空間作業系統。為實現系統的高效運作,應配套合理的生產計劃及裝卸工藝。在碼頭作業計劃實施前,可使用仿真技術驗證生產邏輯,找出工藝流程中限制碼頭運作效率的瓶頸,加以改進從而提高碼頭的經濟效益。
當碼頭仿真系統接入實體碼頭狀態數據,就形成了實體碼頭的實時數字孿生體。虛擬港口運行過程中的動態數據為港口的精細數字化管理提供了決策參考,使碼頭管理者可以合理調度設備,提高場地利用率及裝卸作業效率。
目前針對自動化碼頭仿真作業系統的研究主要有:張清波使用仿真軟件 WITNESS 建立了集裝箱碼頭模型,在雙懸臂工藝模型基礎上仿真裝卸工藝;周鵬飛使用圖形化仿真建模軟件Plant Simulation搭建了回字型自動化集裝箱碼頭,仿真不同工況下碼頭資源分配;澳大利亞的 Realtime Rusiness Solution Pty公司研發了港口仿真軟件Xwindow,以圖形化方式為設備調度、堆場管理提供了解決方案。現有技術均基于二維平面,將碼頭要素對象符號化,仿真效果不直觀,無法反映碼頭運行過程中可能存在的干涉問題;且沒有與實際碼頭交互的信息接口。
本文基于數字孿生技術與離散事件理論,提出了一種無人集裝箱碼頭規劃、仿真與運行監控方案。使用面向對象的方法,將碼頭關鍵要素抽象為具有屬性、方法的對象,并對要素的結構、機構、工作參數和作業功能進行了描述;基于這些要素對象模型,搭建完整碼頭系統,實現碼頭系統的數字化建模,解決了復雜碼頭場景的規劃驗證、工藝仿真及運行監控問題。
2 無人集裝箱碼頭規劃、仿真與運行監控方案
2.1 概述
碼頭是異步運行的復雜耦合系統,難以通過單一的模型描述。本方案將實際碼頭中的物理場景與特征設備抽象成具有代表性的對象。通過數字化要素對象的組合,實現碼頭的快速規劃,解決復雜港口的生成問題。
3D數字化碼頭系統建立后,可在碼頭操作系統(TOS)和設備控制系統(ECS)驅動下仿真裝卸工藝,驗證TOS制定的裝卸生產物流邏輯。在實際生產中,數字化碼頭系統可作為實際碼頭的集成平臺與工作終端,監控碼頭動態進程,對碼頭的生產、運輸環節實施干預。
2.2 基于要素對象的碼頭系統快速規劃
實際碼頭中的要素除地形地貌、河流海洋等自然條件外,可分為兩種類型:一是動態設備及待運輸貨物,包括碼頭裝卸設備如岸橋、場橋、AGV、船舶及上述設備運載的集裝箱;二是靜態場地,包括集中堆放集裝箱的堆場、水平運輸設備行駛的道路、船舶設備停靠的海岸線、標識道路坐標的磁釘。
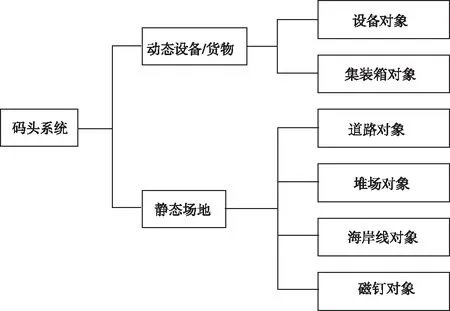
圖1 碼頭系統組成
根據場地布局圖紙及設備三維圖紙可快速初始化碼頭系統中各數字化要素對象,再結合數量信息及位置信息將已定義的諸碼頭要素組合排列,可快速搭建出與實際碼頭物理特征匹配的虛擬碼頭,完成碼頭規劃方案驗證。
2.3 與TOS、ECS集成仿真與實際運行監控方案
基于要素對象的碼頭系統搭建完成后,可接入仿真形式的TOS及ECS信號,用于驗證集裝箱裝卸工藝及生產計劃。若接入的TOS和ECS任務信號來源于實際碼頭,則該系統成為監控碼頭實時運行的終端平臺。
碼頭操作系統TOS負責制定船舶計劃及維護集裝箱庫存等任務。數字化碼頭通過通信接口獲取TOS工作指令,按規定作業順序將裝卸任務下達至虛擬系統中的指定裝卸設備。該裝卸設備依照作業列表中的作業指令,在ECS信號的控制下完成對指定集裝箱對象的操作。
設備運行控制系統ECS具有設備管理調度及控制功能,可規劃設備運行路線并協調不同設備間交互作業。在數字化碼頭中,設備對象根據ECS控制信號變更運行模式或對集裝箱執行抓取、釋放操作。從輸入的ECS信號可獲知最新的設備狀態、作業進度及任務結果。
3 無人集裝箱碼頭關鍵要素建模
3.1 設備建模
集裝箱碼頭總體架構由岸邊裝卸系統、水平運輸系統及堆場作業系統三個子系統組成。岸邊裝卸系統的代表設備為岸橋和集裝箱船,負責到港集裝箱的裝卸;水平運輸系統的代表設備為自動導引運輸車AGV,負責集裝箱在水平區域的運輸;堆場裝卸作業系統的代表設備為場橋,負責堆場區域集裝箱的存取。數字化碼頭系統中應包括上述四種類型的設備對象。
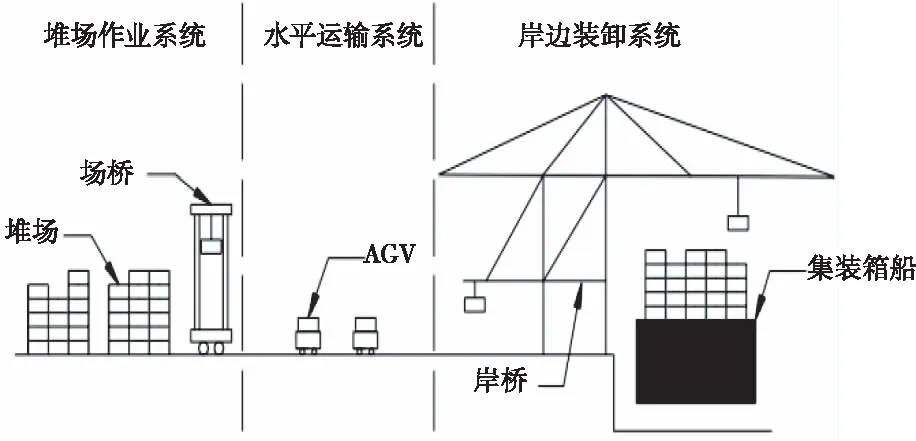
圖2 集裝箱碼頭總體架構
采用面向對象的建模方法,將設備抽象為具有特征屬性和運動方法的對象。特征屬性包括對象的組成構件、運動副及設備參數,其中組成構件是構成設備結構的單元,兩個或多個具有運動關系的構件間存在運動副,從構件間的運動副限制可推導設備對象的運動方法。設備參數包括結構參數與性能參數,分別反映設備對象的結構尺寸與運行特性。
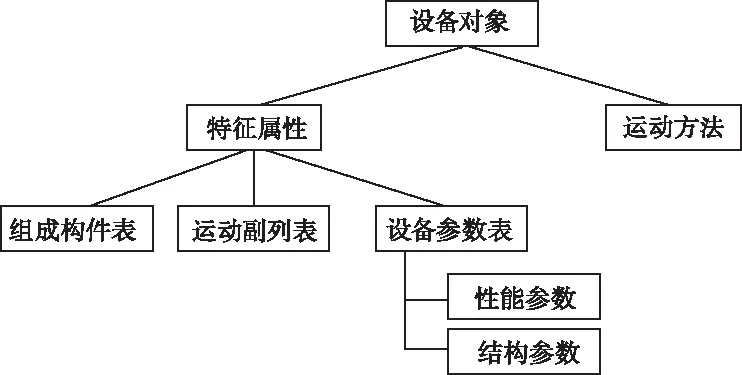
圖3 設備對象化建模
以岸橋為例,分析設備結構及運動特性,得到岸橋設備模型表如表1所示。
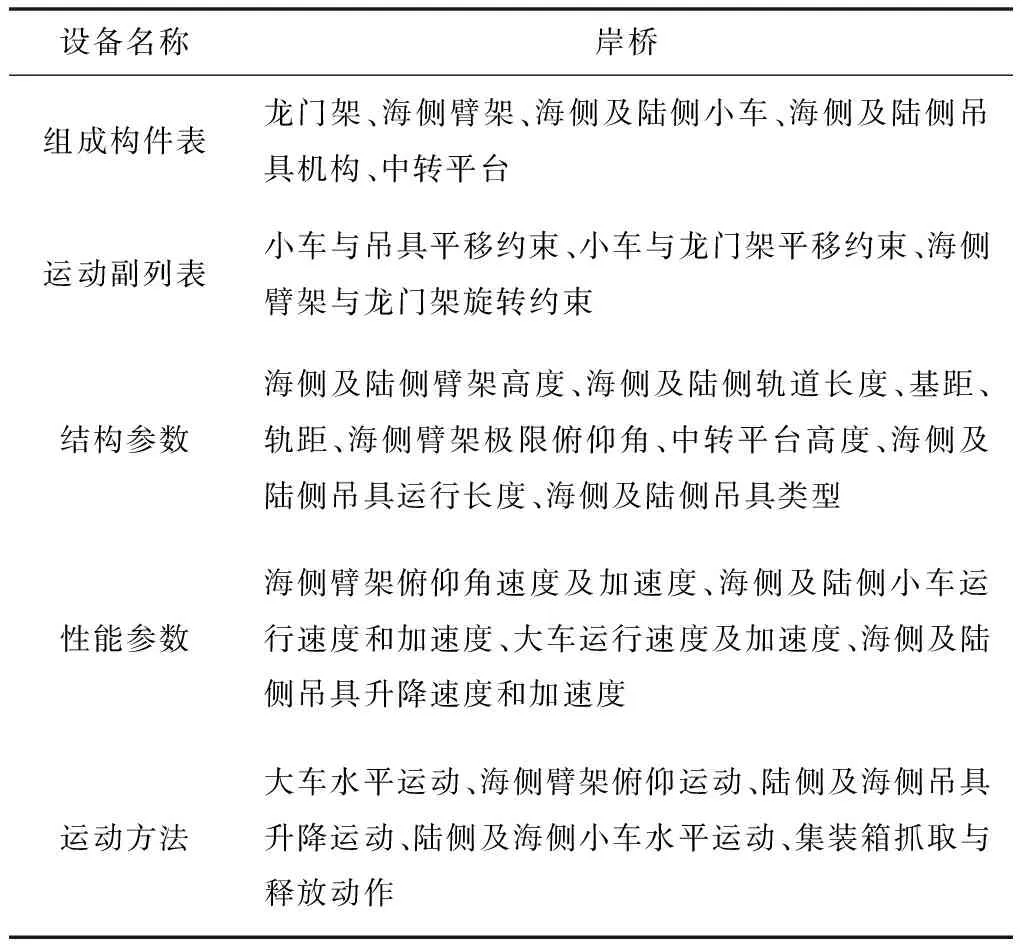
表1 岸橋設備模型表
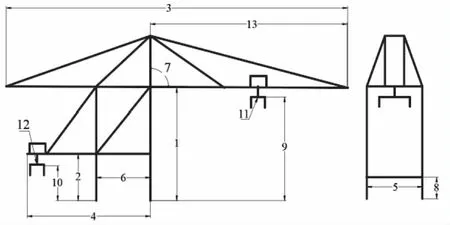
圖4 岸橋結構參數示意圖
上圖說明了參數化建模時的結構參數含義。其中1為海側臂架高度,2為陸側臂架高度,3為海側小車軌道長度,4為陸側小車軌道長度,5為基距,6為軌距,7為臂架俯仰角,8為中轉平臺高度,9為海側吊具運行范圍,10為陸側吊具運行范圍,11為陸側吊具類型,12為海側吊具類型,13為海測臂架長度。
圖5系統中描述岸橋性能參數的結構體。不同型號的岸橋設備組成構件及構件間運動副大致相同,但結構尺寸和運動性能存在顯著差異。因此數字化碼頭中的岸橋模型組成構件及運動副由系統默認生成。當需要構造岸橋對象時,可使用默認的參數值,也可根據設備實際型號自定義結構及性能參數。
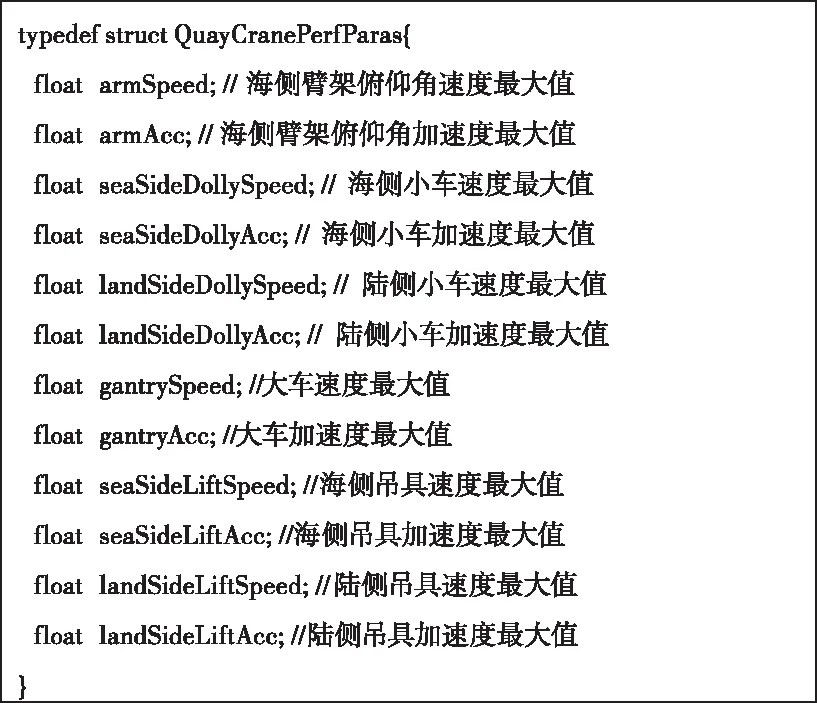
圖5 岸橋性能參數結構體
岸橋設備構造完成后,可基于參數驅動設備,模式包括位置驅動、位移驅動、勻速驅動、變速驅動。位置驅動模式下,根據輸入的坐標將岸橋快速移動至指定位置;位移驅動模式下,根據輸入的行走距離驅動岸橋;勻速驅動模式下,岸橋按照指定速度和時間運動;變速驅動模式下,岸橋可實現指定時間內的加減速運動。
3.2 道路建模
3D數字化碼頭系統使用道路對象描述實際碼頭中的水平運輸區域。道路對象自頂向下由道路、道路軌跡線及車道三層邏輯構成。道路對象下可創建直線型或曲線型道路軌跡線,多條軌跡線首尾相接,標識出道路范圍;道路軌跡線的屬性包括編號、類型及起始點;單條軌跡線下自左向右連續分布多條車道,車道屬性包括編號、類型、方向及寬度。
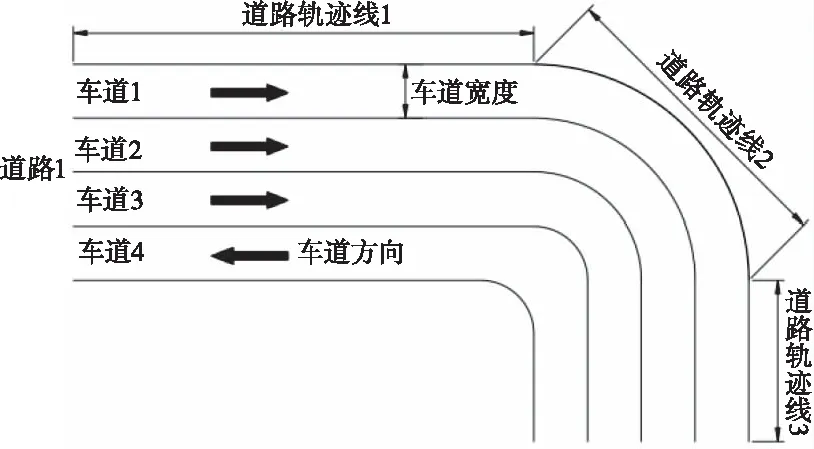
圖6 道路示意圖
可根據實際碼頭場地布局圖紙,按照道路-軌跡線-車道樹狀結構的邏輯建立道路對象模擬碼頭路網結構。
3.3 堆場建模
3D數字化碼頭系統使用堆場對象描述碼頭中集中堆放集裝箱的區域。堆場對象屬性包括位置坐標及朝向、長寬及堆高限制、堆場內軌道長度及寬度、卸貨路標識。堆場對象記錄了堆場箱位到堆場空間位置的映射,堆場對象的場箱位布局由堆場布局方法完成。堆場對象的貝位存儲信息可用于分析堆場的堆存作業能力和年通過能力。
堆場對象下轄的交換區配置有集裝箱緩沖支架,可模擬演示實際生產中各類水平運輸設備的裝卸工藝邏輯,屬性包括支架編號、空閑及被占用緩沖支架數量。
可參照碼頭實際堆垛方案,初始化堆場堆高、堆寬、箱區長度及貝位信息。
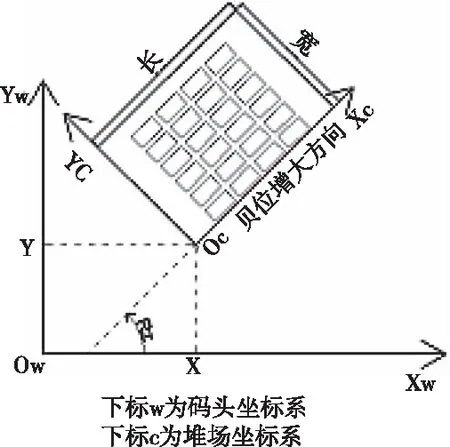
圖7 堆場示意圖
3.4 海岸線建模
3D數字化碼頭系統中使用海岸線對象描述碼頭岸壁區域的構成。海岸線對象下轄海岸線段、軌道及泊位三個子類型。海岸線段類型屬性包括海岸線段編號、類型及起始點;軌道類型屬性包括軌道編號、寬度及起始點;泊位類型屬性包括泊位編號及起始點。
可參考實際碼頭的場地布局,使用海岸線類型描述碼頭的海側物理邊界;使用泊位類型描述停泊計劃規劃的船舶停靠區域;使用軌道類型描述集裝箱岸橋的行駛路徑。
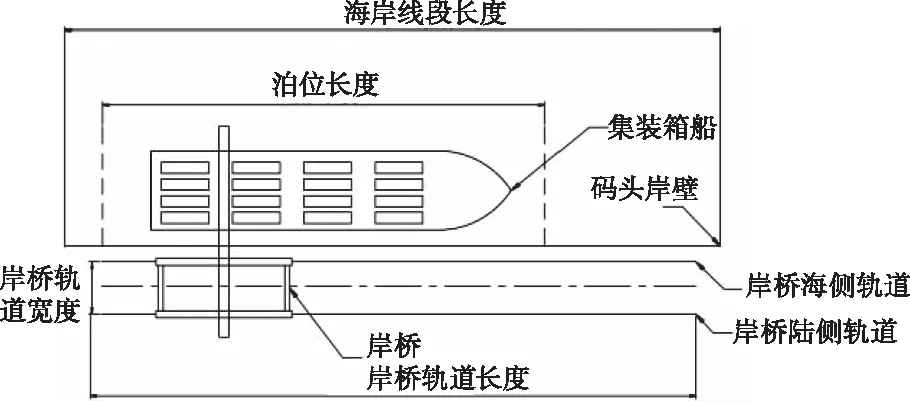
圖8 海岸線示意圖
3.5 集裝箱建模
為了用統一的標準描述碼頭中的集裝箱模型,3D數字化碼頭系統中構建了集裝箱對象。集裝箱對象的屬性包括集裝箱編號、名稱、制造商信息、重量、箱尺寸、箱型、箱狀態、持箱人及場箱位。系統中的集裝箱狀態管理維護集裝箱的狀態信息并提供集裝箱查找方法,可根據集裝箱編號或名稱快速查找集裝箱在3D碼頭場景中的位置,還可查詢集裝箱外形尺寸及箱位狀態、生成整個碼頭的集裝箱裝卸報表。
3.6 磁釘建模
磁釘是一種無線射頻識別標簽,呈矩陣型埋設在道路兩側,作為外部獨立信號源為水平運輸設備提供實時導航信息。單個磁釘對象的屬性包含編號、磁釘所處的道路編號及位置坐標。3D數字化碼頭系統中的磁釘管理模塊負責記錄磁釘位置信息并提供磁釘多種查詢方法。
磁釘和集裝箱的創建都通過讀入具有規范格式的EXCEL文件實現,系統中磁釘和集裝箱的數量、規格及位置信息與真實碼頭相對應。
4 應用驗證
根據方案所述,基于面向對象方法與數字孿生技術開發原型系統。下文以洋山四期碼頭為案例,結合外部TOS及EOS信號驅動驗證原型系統功能。洋山四期無人集裝箱碼頭陸域平面形態呈長條型,箱區垂直于碼頭布置。碼頭岸線長2350m,縱深200~640m,建設7個深水泊位。港區采用了當前行業中應用最廣泛的雙小車岸橋+AGV+ARMG裝卸方案。
參考洋山四期平布局圖,按照從海側至陸側的順序,構造相應數量的泊位、海岸線、岸橋軌道、道路及堆場對象,并按照平面圖的位置坐標完成布局。隨后參考設備三維圖紙及設備運行規律確定設備結構參數及性能參數,構造設備對象加載到系統中指定位置。
按照上述積木式構造方法,可快速搭建出與實際碼頭布局特征匹配的3D數字化碼頭系統。

圖9 洋山四期數字化碼頭系統
系統中所有設備模型由設備對象庫統一管理,庫中維護的屬性包括設備序號、名稱、占用狀態及顯示狀態。設備管理方法包括添加新設備、刪除系統中已存在設備及修改已存在設備的屬性參數。
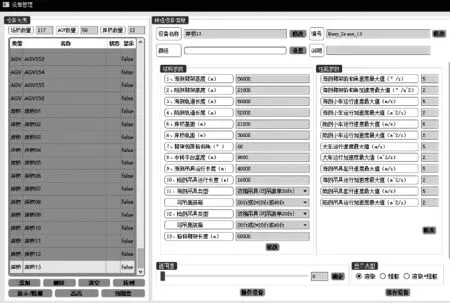
圖10 設備管理界面
數字化碼頭系統可接入ECS及TOS信號仿真或監控實體碼頭運行。以下通過外部ECS及TOS信號驅動,模擬將集裝箱從船舶存放至堆場的完整工藝流程:
第一步,系統讀取TOS的船舶計劃,將要進行卸載操作的船舶設備對象停泊至作業計劃指定泊位。第二步,負責該泊位的岸橋對象在ECS指令控制下,調用海側小車平移方法與海側吊具升降方法將船舶中的集裝箱對象吊裝至岸橋對象中轉平臺上,隨后岸橋對象調用陸側小車平移方法與陸側吊具升降方法將集裝箱對象吊裝至岸橋等候區內的AGV對象上。第三步, AGV對象在ECS信號控制下沿車道運行,將集裝箱對象運送到TOS信號指定裝卸點。同一車道上行駛時,水平運輸設備行駛方向保持不變;通過道路中的交叉路口時,水平運輸設備可根據裝卸目標點切換車道,磁釘對象輔助AGV實時定位。第四步, AGV對象調用頂升方法將集裝箱抬升至堆場海側緩沖區支架上,工作在堆場中的場橋對象在ECS的控制下,調用吊具的升降方法將緩沖支架上的集裝箱吊裝至堆場中指定貝位,并刷新貝位存儲信息。
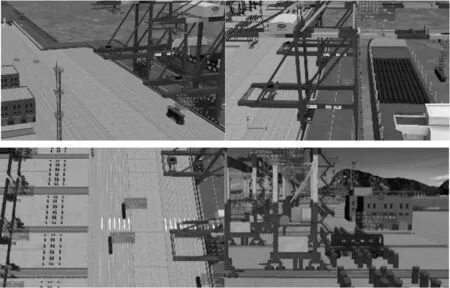
圖11 碼頭設備與集裝箱交互
至此集裝箱對象從船舶存放至堆場的裝卸流程結束。在設定時間內,碼頭中各要素對象在外部TOS和ECS信號的控制下協同作業,系統運行穩定且運行邏輯與預定集裝箱裝卸流程一致,未發現異常。
5 結論
本文針對無人集裝箱碼頭的快速建模與仿真問題,提出了面向集裝箱碼頭規劃、仿真與監控的數字孿生建模與仿真方法。主要包括碼頭的關鍵要素建模、碼頭系統建模、與TOS及ECS接口方法,并據此開發了原型系統。本文的方法可用于碼頭規劃過程的快速、可視化建模與仿真,驗證碼頭布局與功能設計的合理性;在碼頭實際運行階段,可與TOS和ECS系統結合實現實際碼頭系統的實時、可視化運行監控。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00