履帶起重機桁架臂側向位移的測量方法研究*
2022-07-18 12:54:00崔丹丹石國善
起重運輸機械 2022年12期
崔丹丹 石國善
徐工集團工程機械股份有限公司建設機械分公司 徐州 221004
0 引言
為了滿足不斷升級的吊裝需求,適應競爭日趨激烈的市場環境,提升產品的核心競爭力,履帶起重機桁架臂系統逐漸向性能更強、質量更輕、成本更低的方向不斷發展。履帶起重機在吊載時,桁架臂在變幅平面和回轉平面都會產生位移,基于桁架臂的受力特點,其在變幅平面內可簡化為簡支梁模型,回轉平面簡化為懸臂梁模型。由此可見,桁架臂在回轉平面內的抗彎和抗失穩能力更弱,且臂架的側向位移越大,臂架系統重心距離整機傾覆線越遠,傾覆力矩越大,整機抗傾覆穩定性越差。桁架臂的側向位移一般是因地面不平、風載荷、偏載、起制動引起的附加動載荷等因素而起,從吊裝過程的安全性考慮,保證桁架臂的側向位移顯得尤為重要,GB/T 14560—2011《履帶起重機》中明確規定:臂架組合的頭部側向水平位移不應大于整個臂架組合長度的2%[1]。本文提出一種履帶起重機桁架臂側向位移的測量方法,并開發了相應的硬件及軟件測量系統,并通過現場試驗驗證結果的正確性。
1 起重機臂架系統側向位移測量方法研究現狀
1.1 測量臂架側向位移的現有技術
1)方法1 在桁架臂中心位置從頂節臂及底節臂布置拉索,在中間節的腹桿或弦桿上安裝拉繩位移傳感器,傳感器拉繩固定在拉索上,通過拉繩位移傳感器監測各測量點拉索相對于吊臂腹桿或弦桿的位移距離,推出吊臂的彎曲度[2]。
2)方法2 針對箱形臂旁彎量的測量,方法是測量吊裝時箱形臂臂頭和臂尾之間的距離L,以及臂頭和臂尾的連線的實際位置相對于理論位置的偏轉角度θ,根據公式P=L·sinθ得到吊臂的旁彎量P[3]。
3)方法3 利用全站儀測量臂架變形的[4]。
4)方法4 利用圖像識別法推導臂架變形[5]。
1.2 現有測量臂架側向位移技術存在的問題
1)方法1適用于單根臂的旁彎量測量,且前期布置較繁瑣,對于組合臂架工況(如固定副臂工況、塔式副臂工況等)該方法無法直接測得副臂臂頭的旁彎量。
2)方法2中旁彎量P=L·sinθ對偏轉角度θ的測量精度過于敏感,臂長越長精度越差。
3)方法3和方法4成本較高,操作難度大。
2 履帶起重機桁架臂側向位移的測量方法
本文提出了一種適用于履帶起重機桁架臂側向位移的測量方法及測量系統,在測量桁架臂上某一點的位移時只需放置一臺移動站,通過地面的基站進行差分補償,無需設置其他參照物,即可較精確地測得從加載至卸載整個作業周期內測點的側向位移。若需要測量多點的側向位移,則只需在相應測點處布置移動站即可,共用一個基站進行誤差補償。
2.1 臂架側向位移測量系統
臂架側向位移測量系統為RTK測量系統,由移動站和基站部分2部分構成,移動站部分原理圖如圖1所示,基站部分原理圖如圖2所示,并開發了配套的RTK側向位移測量軟件。
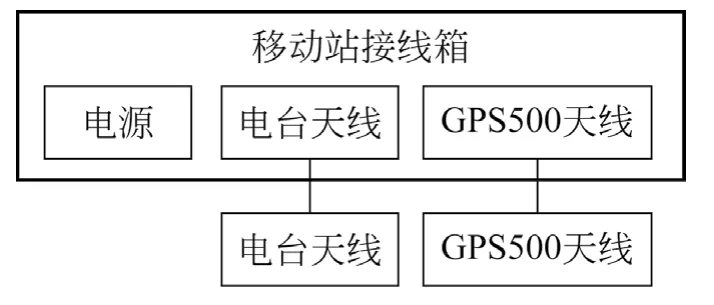
圖1 RTK測量系統移動站部分原理圖
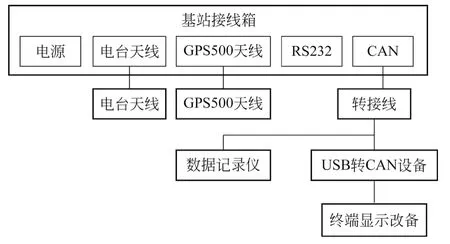
圖2 RTK測量系統基站部分原理圖
2.2 測量臂架側向位移的實現方法
將移動站通過特制工裝固定在桁架臂測點位置(圖3中B點,該點測量的是臂頭的側向位移),保持移動站正面始終豎直向上,通過臂架上的電器盒為其供電,將基站布置在試驗過程中位置固定或變形可忽略的結構件上(圖3中A點,如駕駛室頂部、轉臺上或地面等),移動站和基站接收北斗定位系統的數據,根據基站數據通過差分補償的算法對移動站數據進行糾偏,使測量數據精度更高。數據記錄儀可記錄從加載至卸載整個周期內測點的側向位移,測得的數據可導出至第三方軟件上做后期數據處理,加載過程中通過顯示設備可實時顯示測點側向位移的數值。在超長臂工況時,由于臂架剛度變化多次,為了獲得各變截面處的側向位移,應在臂架變截面處布置相應的移動站(如圖3中C點和D點),這些移動站共用一個基站實現誤差補償。
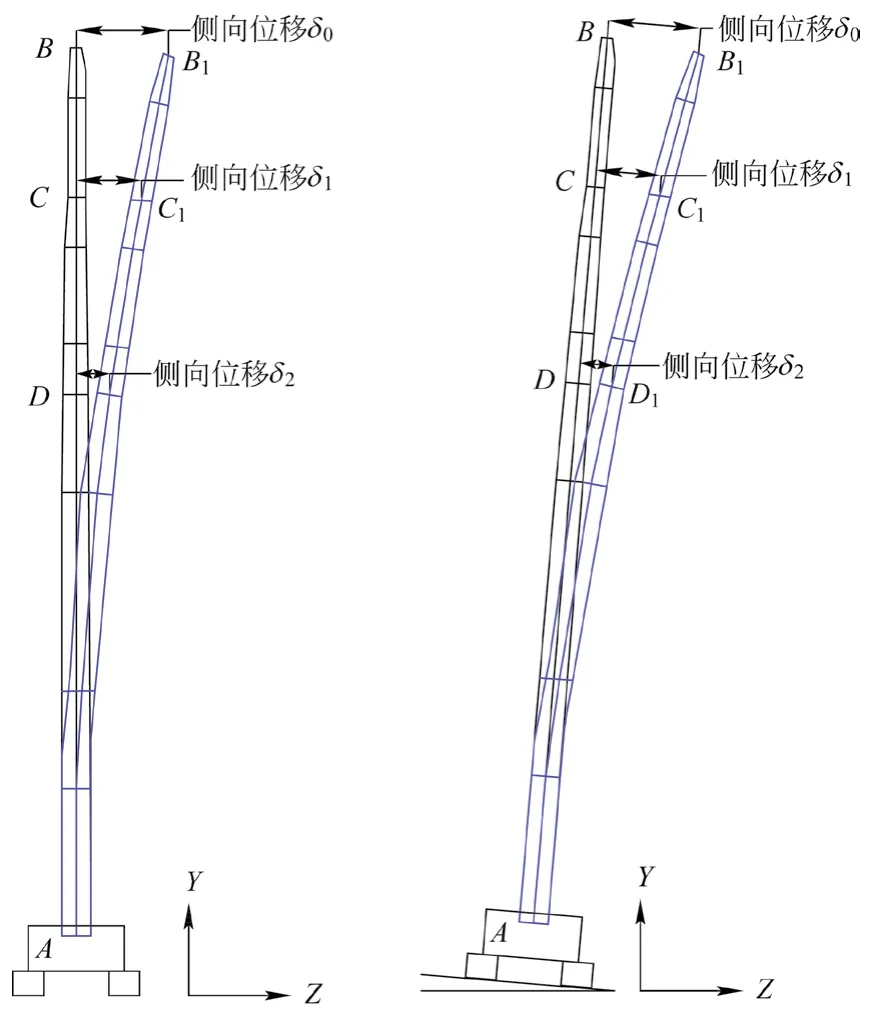
圖3 臂頭側向位移測量示意圖
2.3 側向載荷的施加方法
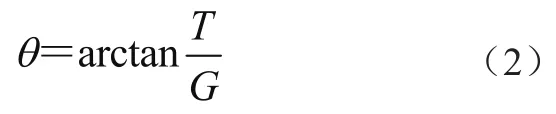
對于施加的側向載荷的大小,本文通過測量重物的水平偏移距離來控制,可通過理論計算結合有限元仿真求得施加相應牽引力時牽引車需要移動的距離。由于桁架臂結構復雜,其等效截面慣性矩求解較為繁瑣,可選用有限元計算軟件進行仿真計算,得到指定側向載荷作用下測點的側向位移值K1,如圖4所示。以重物為研究對象,其受力情況如圖5所示,其中G為重物的重力,S為鋼絲繩的拉力,T為所需施加的側向載荷,通過力系平衡原理可得
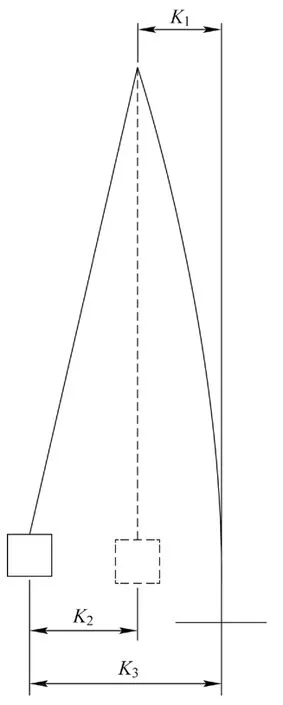
圖4 牽引距離示意圖
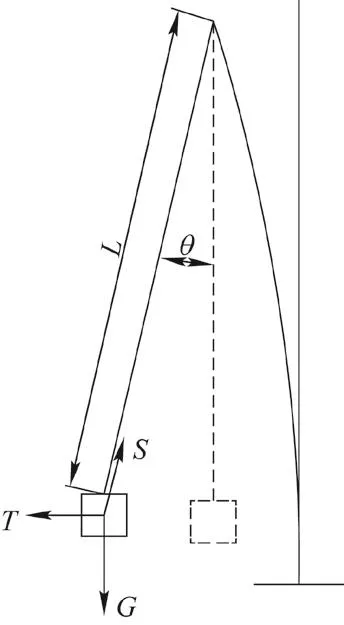
圖5 重物受力示意圖
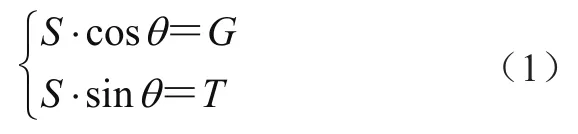
式中:θ為鋼絲繩的偏擺角。
由式(1)可得
若不考慮臂架的變形,在獲得所需牽引力T時,重物需要水平偏移的距離值K2可表示為

若考慮臂架的變形,在獲得所需牽引力T時,重物需要水平偏移的距離值K3可表示為

3 有限元分析
以某型履帶起重機114 m主臂工況為例,作業半徑為16 m,臂端施加114 t吊載及2%的側向載荷,臂架系統采用梁單元模擬,拉板及鋼絲繩采用桿單元模擬,通過非線性求解得到圖6所示臂架的位移云圖和圖7所示應力分布云圖。
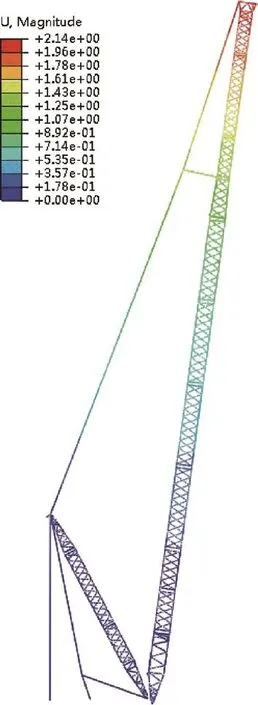
圖6 臂架的位移云圖
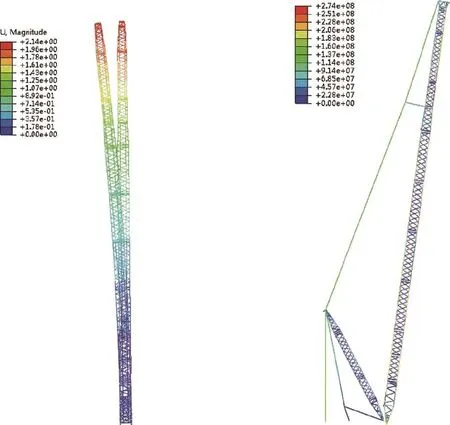
圖7 臂架應力分布云圖
4 試驗分析
以某型履帶起重機114 m主臂工況為例,作業半徑為16 m,共5個試驗工況,每個工況測試3組,試驗數據與仿真結果進行對比,分析結果如表1所示。側向載荷通過側向載荷的施加方法施加,試驗中通過拉力傳感器顯示值進行驗證,驗證了該方法的可行性。通過本文提出的RTK臂架變形測量系統測得不同試驗工況下臂架頭部的側向位移,得到側向載荷與臂頭側向位移的變化曲線,圖8為某工況下側向載荷的加載全過程對應的臂架頭部側向位移的變化曲線,側載施加過程應緩慢平穩施加,待側載施加至預定值后需要保持一段時間,確保側向位移的數值不會出現較大波動。
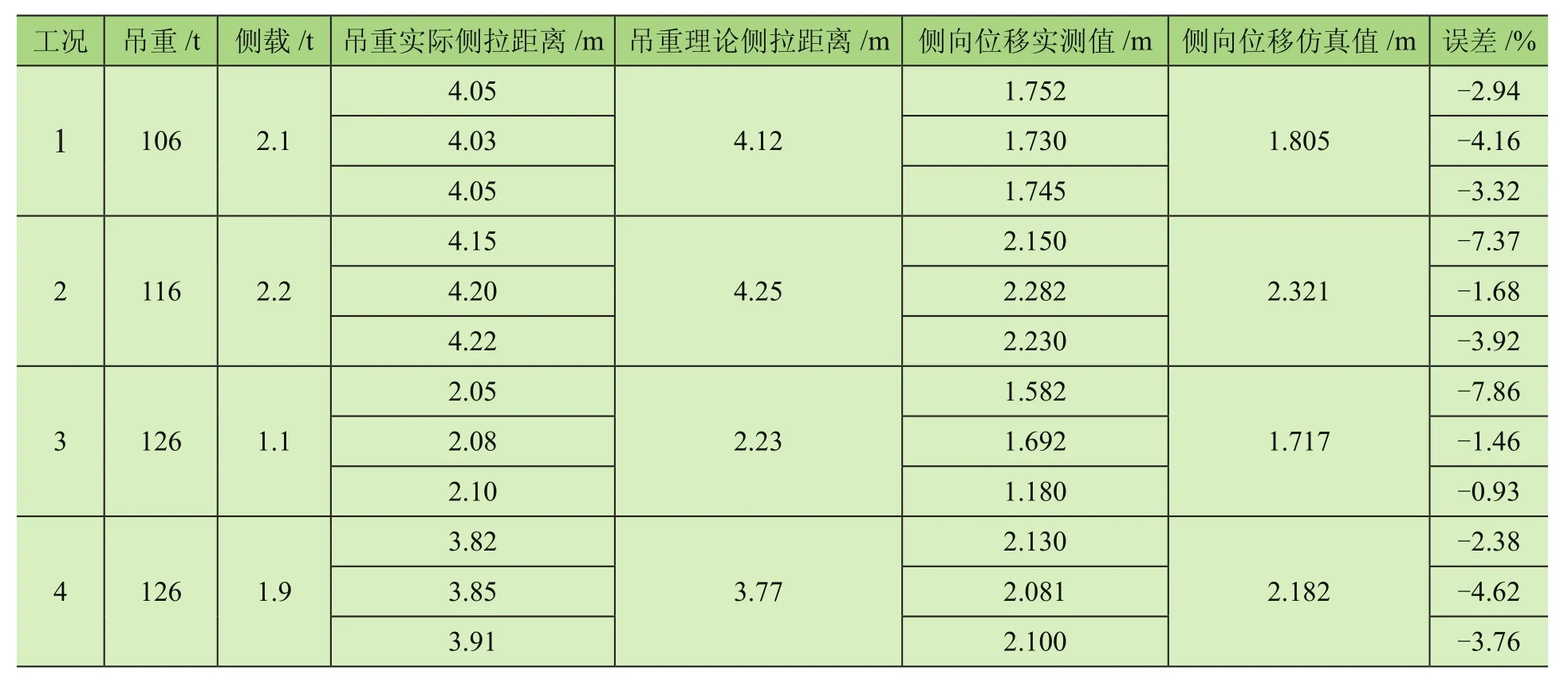
表1 試驗數據與仿真結果對比分析

圖8 側向載荷與臂頭側向位移的變化曲線
由表1數據可知,除少數試驗數據與仿真值誤差較大外,大部分誤差在5%以內,試驗數據與仿真結果基本一致,驗證了RTK臂架變形測量系統的準確性。
5 結論
本文提出了一種履帶起重機桁架臂側向位移的測量方法,并開發了配套的軟硬件測量系統,通過有限元仿真計算對比現場試驗數據,驗證了該測量方法的可行性及測量系統的準確性,該測量系統安裝簡便、可操作性強,解決了履帶起重機桁架臂側向位移難以精確測量的難題,具有推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
