鋼支撐軸力補償伺服系統在市域鐵路深基坑工程中的應用
2022-07-18 08:52:44莊星宇任捷遠陳國飛陳俊曉中國建筑第八工程局有限公司上海公司上海200120
中國房地產業 2022年21期
文/莊星宇、任捷遠、陳國飛、陳俊曉 中國建筑第八工程局有限公司上海公司 上海 200120
引言:
隨著城市化進程迅猛發展,城市面積不斷擴大,城市內部人員快速流動的需求成為城市交通發展新方向。市域鐵路是一種全新的嘗試。與傳統城市軌道交通相比,市域鐵路設計時速達到160km/h,基坑平均深度超過20m。因此,圍護結構變形控制成為市域鐵路車站施工過程中的焦點問題。
鋼支撐作為一種快拼裝、高周轉的支撐形式得到工程界的青睞,但鋼支撐在使用過程中,常出現軸力損失情況,導致基坑圍護結構變形控制效果不理想。同時,傳統的鋼支撐軸力監測方式受鋼支撐施工、監測方式等因素影響,準確度與真實性有待商榷。鋼支撐軸力補償伺服系統,利用千斤頂油壓對鋼支撐軸力進行實時監測,相比于振弦式軸力計穩定性、準確性更高,同時可以根據軸力監測結果進行軸力補償,因此在工程實踐中得以推廣。目前,國內對鋼支撐伺服系統正處于發展階段,有學者對其原理、適用性等因素開展相關研究,但在工程實踐中伺服系統對深基坑圍護結構變形的控制效果鮮有涉及。本文將結合工程實例,對伺服系統在市域鐵路車站深基坑圍護結構變形控制方面展開討論。
1、伺服系統簡介
伺服系統由鋼支撐活絡頭千斤頂、油壓監控中心、補油裝置形成的一套,可以實時進行鋼支撐軸力補償。傳統的伺服系統,每6-8 個端頭需要配置一臺油泵,用油管連接,因此施工現場常見管線密集,且每隔一段距離便有一臺油泵,占地面積大,使伺服系統在場地狹窄的工程實例中難以得到應用。經過開發與改進,出現一種無管無線的伺服系統總成,一改油泵、管路的笨重形象,將所有裝置集成到端頭中,最大程度減小了占地面積。因此,在狹窄空間的線性工程,尤其是城市內部的下穿隧道、地鐵車站等周邊環境復雜,場地小且對周邊環境保護要求高的工程中,智能伺服系統總成有廣泛的應用場景。
2、工程實例
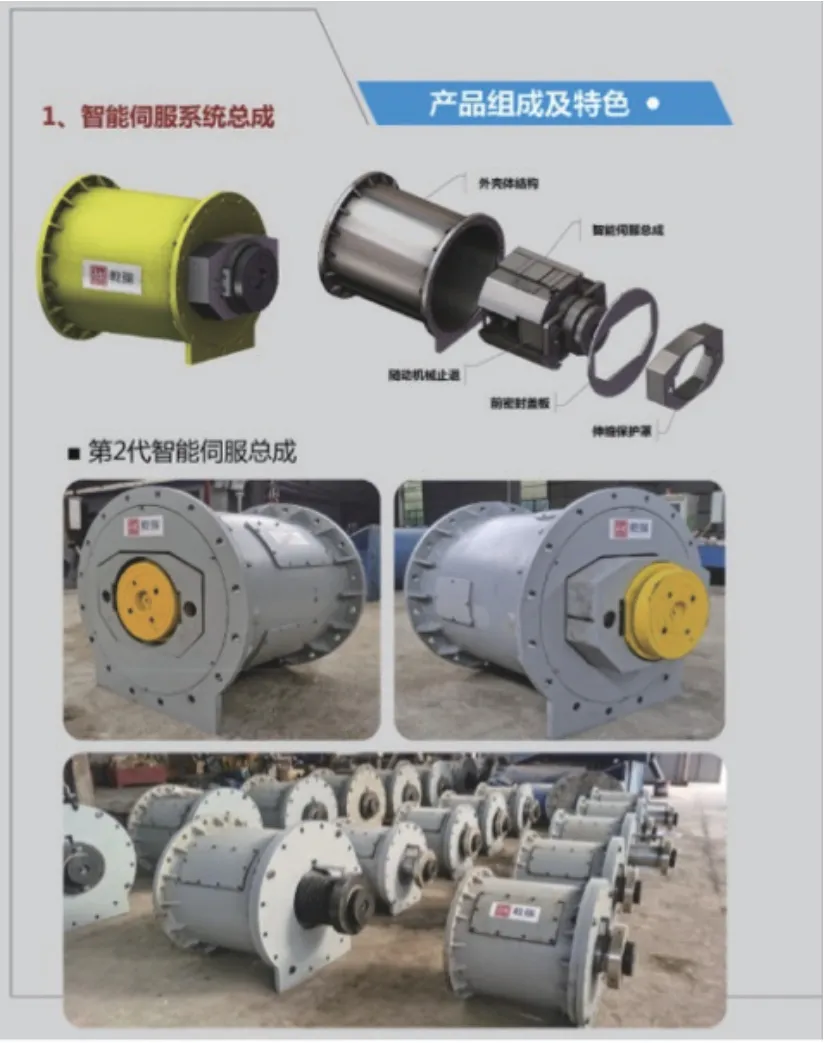
圖1 伺服系統總成結構

圖2 伺服系統應用場景
2.1 工程概況
上海市域鐵路某車站深基坑長172.8m,寬27.8m,最大挖深28.05m。車站采用地下連續墻作為圍護結構,第一、三道支撐為混凝土支撐,第二、四、五、六道為鋼支撐。由于在前期征地階段,基坑南側有房屋為拆除,該房屋距離基坑邊緣最近距離僅6m,故在影響范圍內所有鋼支撐附加伺服系統,以控制圍護結構變形,從而減小對周邊環境的影響。同時,通過布置測斜管對圍護結構變形進行監測,布置情況如圖3所示。
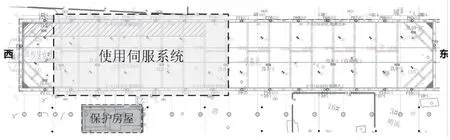
圖3 工程實例概況
南北兩側地下連續墻中共布置14 組測斜管,為方便表達,自西向東對測斜管按對編號,并用“南”“北”區分。其中2-7 號位于使用鋼支撐伺服系統的區域內。
2.2 圍護結構變形分析
由于基坑底板澆筑完成后,圍護結構變形明顯趨于收斂。因此,將底板澆筑完成時地下連續墻測斜變形作為最終變形。將各測點最終測斜變形繪制成曲線后(如圖4),使用伺服系統的范圍內,圍護結構變形明顯小于未使用伺服系統的部分。由于基坑施工工藝、施工節奏在全過程中保持一致,且基坑周邊環境相似,對不同區域圍護結構變形的影響可以忽略不計。因此,可以認為伺服系統對圍護結構變形控制,具有一定作用。
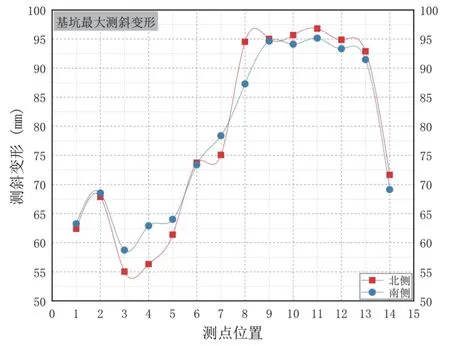
圖4 圍護結構最大變形規律
同時,基坑東西兩側近似對稱,故可以將對應位置的測斜變形進行對比,進一步分析伺服系統的應用效果。取4 號測點與對應的13 號測點進行對比。從施工過程來看,在第二層土開挖至第二道鋼支撐施工完成階段,由于都僅有第一道混凝土支撐,故圍護結構變形相差不大。從第三層土開挖開始,使用鋼支撐伺服系統的優勢逐漸變得明顯,圍護結構變形在數值上到有效控制。但不難發現,圍護結構的最大位移都發生在開挖面下方3-5m 范圍。因此,伺服系統對于圍護結構變形形式影響不大。(圖5、圖6)
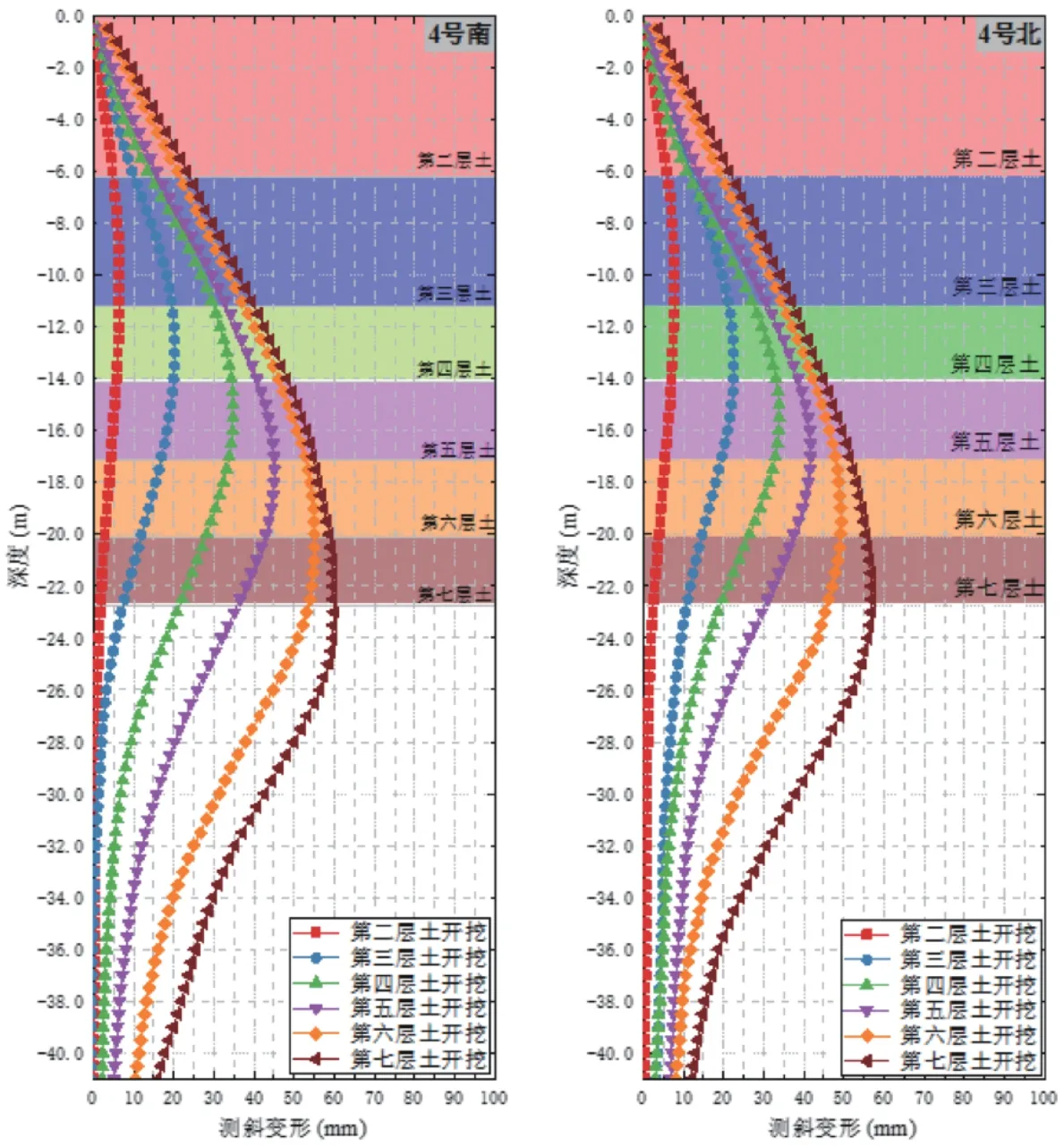
圖5 4 號測點施工各階段圍護結構變形情況
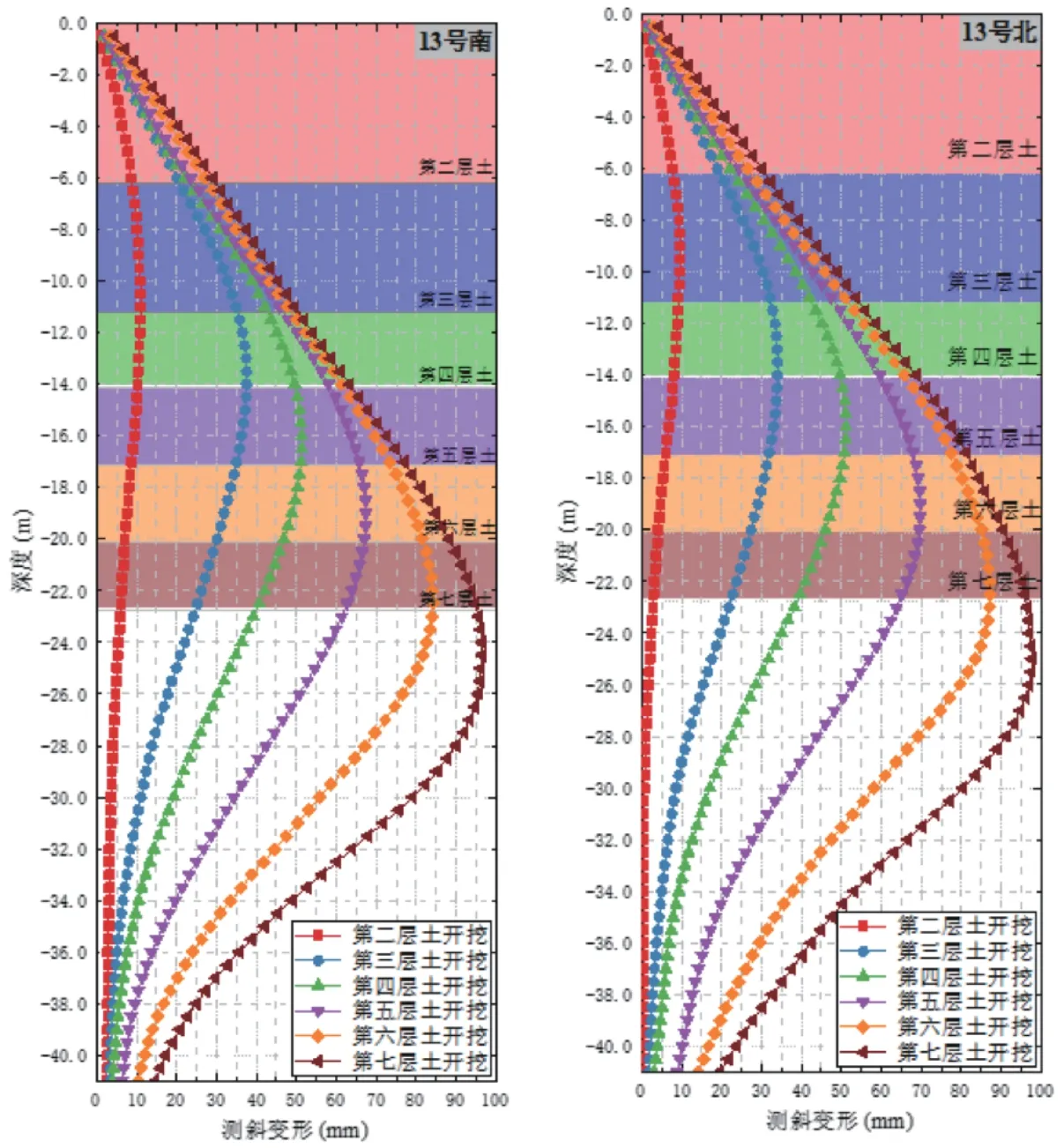
圖6 13 號測點施工各階段圍護結構變形情況
當關注到第二、四、五、六道鋼支撐位置圍護結構在基坑開挖過程中的變形情況時(如圖7)可以發現,第二道鋼支撐在采用伺服系統后,對后續基坑開挖變得不敏感。相比于未采用伺服系統的13 號測點,4 號測點在第三層土方開挖時,圍護結構變形速率沒有大幅加快。當基坑開挖深度增加后,尤其是第三道混凝土支撐完成后,基坑開挖過程對第二道鋼支撐處圍護結構變形影響較小,且4 號測點與13 號測點的曲線基本平行,可以認為伺服系統在該階段對淺層圍護結構變形的影響程度不大。但當觀察第四、五、六道鋼支撐處圍護結構的變形趨勢時,每一次開挖過程,4 號測點變形增速雖然也有明顯變化,但變化幅度相較13 號測點都較小。因此,伺服系統在基坑開挖的過程中,可以有效地控制圍護結構變形發生突變,減小開挖施工對已形成的支撐的影響。
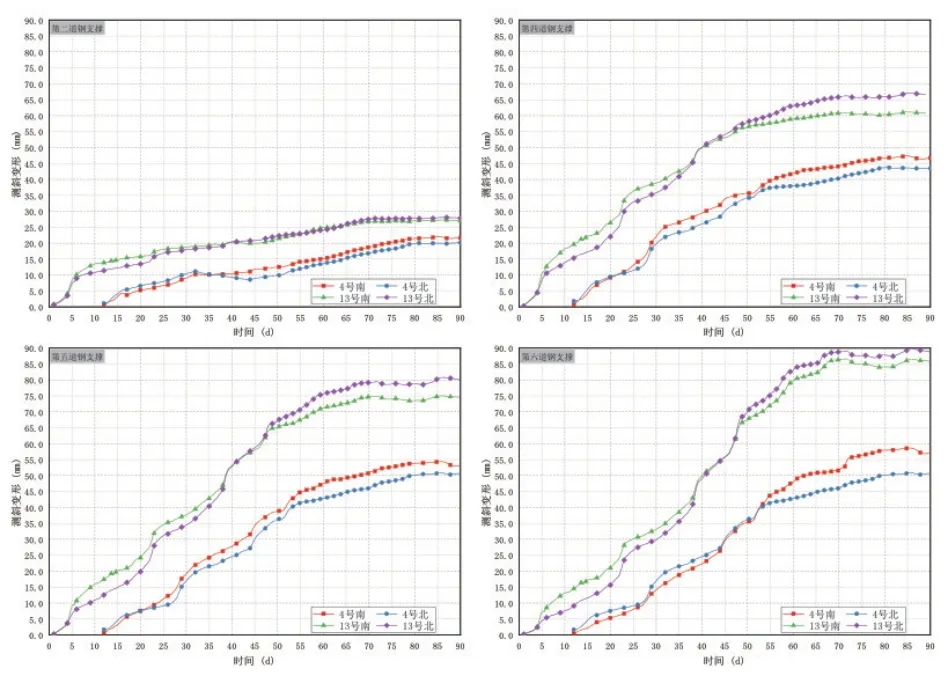
圖7 第二、四、五、六道鋼支撐處圍護結構變形情況
2.3 基坑外地表沉降變形分析
觀察圍護結構變形的同時,也需要觀察基坑外地表沉降的變化,以判斷基坑開挖對周邊環境的影響程度。取4 組地表沉降監測點數據進行分析,其中D17、D18位于未采用伺服系統區域,南側緊鄰接坑房屋附近的兩組測點,D21、D22 為采用伺服系統區域,南側緊鄰基坑房屋附近的兩組測點。如圖8,在基坑開挖前,4 組測點的地表沉降值相近,其中D22 的平均地表沉降最大。基坑開挖施工前,基坑開挖后,根據檢測結果記錄開挖后累計沉降變形,同樣以底板澆筑完成時沉降變形作為基坑開挖階段的最終時刻。如圖9,基坑開挖后,D21、D22 的累計變形明顯小于D17、D18。因此,可以認為,鋼支撐伺服系統有利于基坑開挖過程中對周邊環境的保護。

圖8 開挖前基坑外地表沉降累計變形情況
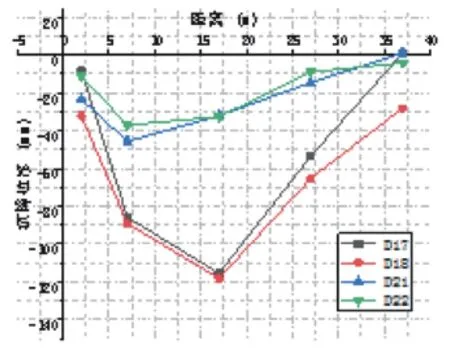
圖9 開挖后基坑外地表沉降累計變形情況
結語:
通過對工程實踐過程中基坑圍護結構變形的分析,可以得出以下結論:
(1)相比于傳統預加軸力的鋼支撐,采用軸力補償伺服系統的鋼支撐,可以在一定程度上加強對基坑圍護結構變形的控制;
(2)軸力補償伺服系統可以減小基坑圍護結構變形,但不改變基坑圍護結構變形規律,無法簡單地通過采用軸力補償伺服系統改變圍護結構最終最大變形發生的深度;
(3)軸力補償伺服系統可以有效地控制圍護結構在已形成支撐的位置發生突變,減小開挖施工對圍護結構的影響,從而起到控制圍護結構變形的效果;
(4)軸力補償伺服系統的應用有利于減小基坑開挖對周邊環境的影響。
雖然,伺服系統經過工程實踐、科技研發,已經取得長足的進步。伺服系統對單根鋼支撐的軸力自動監測、自動補償有顯著的效果,但支撐與支撐之間并不是獨立的個體,單根支撐軸力的變化也會對周邊其他支撐產生影響。因此,伺服系統的研發過程,還應當考慮如何實現鋼支撐之間的聯動,使支撐、圍護結構形成一個完整的體系,從而更好地控制深基坑圍護結構變形。
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
太空探索(2016年6期)2016-07-10 12:09:06
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54