一種基于“圖像+”的智能分類垃圾桶設計
2022-07-17 12:16:51劉美華傅彩明劉進寧順興唐曉天
科技資訊 2022年12期
劉美華 傅彩明 劉進 寧順興 唐曉天



摘要:根據第六屆全國大學生工程訓練綜合能力競賽中“智能分類垃圾桶”要求,該文設計并制作了一種基于K210視覺模塊進行目標檢測的智能分類垃圾桶。在模擬環境和競賽環境下,對該設計檢測分類精準度進行多次測試,該智能分類垃圾桶擁有98.7%的平均正確識別率,且識別時間短,同時具備滿載報警功能,能夠實現垃圾分類過程的高效化與智能化,有助于降低城市垃圾源頭處理成本。
關鍵詞:?圖像+??智能分類垃圾桶??K210視覺模塊??分類精準度
中圖分類號:TN929.5???文獻標識碼:A???文章編號:1672-3791(2022)06(b)-0000-00
生活垃圾分類對于城市良好生活環境的建立和資源最大化利用具有重要義。一方面,部分可回收垃圾得以循環利用、資源再生,給社會、經濟、生態三方面帶來共贏的局面;另一方面,部分不可回收垃圾也得以正常處置,最大限度地減低環境污染情況。
然而,目前中國居民普遍存在垃圾分類意識薄弱、垃圾分類知識掌握不足的問題,導致垃圾分類不徹底甚至不分類垃圾,給后續的垃圾處理帶來巨大的困難。盡管各個城市也都采取了各種獎懲措施來推動垃圾分類,但是從實際執行的過程及效果來看,并沒有達到預期。因此,如何從源頭上解決垃圾分類問題是我們亟待解決的問題[1-3]。
該文從家庭源頭分類出發,利用視覺圖像技術和K210平臺,并結合分類機構,設計了一款家用智能分類垃圾桶樣機。通過多次實驗表明,該垃圾桶能對所投垃圾進行智能識別并分類入桶,可有效代替人為分類,提高城市居民生活垃圾分類的執行率。
1整體設計
根據第六屆全國大學生工程訓練綜合能力競賽內容,所設計的智能分類垃圾桶應該具有以下功能:智能垃圾桶應能正確識別所投放的垃圾屬于“可回收垃圾、廚余垃圾、有害垃圾和其他垃圾”四類中的哪一類,并自動投入到對應的垃圾桶中;投放垃圾時界面能實時顯示所投垃圾種類名稱、投放數量、任務是否完成等;當垃圾桶存放容量達到垃圾桶總容量的80%及以上時,界面顯示滿載并報警提示。
2?機械結構設計
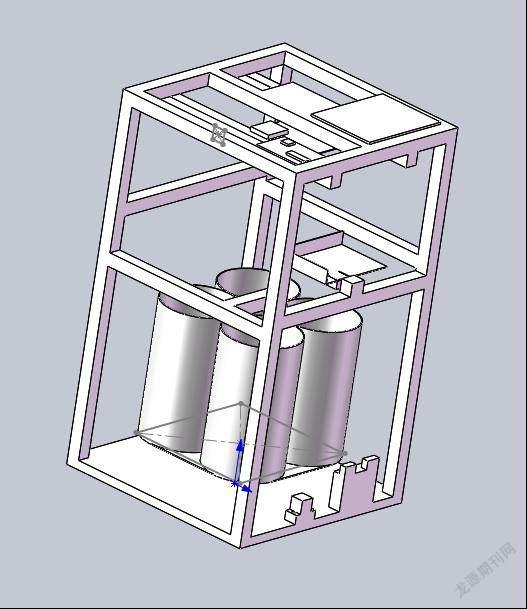
智能分類垃圾桶由四部分組成:整體框架、投放裝置、識別機構、垃圾桶等,其機械結構模型圖如圖1所示[4-5]。整體框架主要由鋁材方管、角件以及螺釘、螺母等搭建完成,分為上下兩層。其中,上層主要用于固定單片機、攝像頭、傳感器、顯示屏、電池等設備;下層的主要功能是固定垃圾桶和投放裝置。同時,為了提高圖像識別的準確率,降低環境光線影響,箱體上層四周用亞克力材質的板子做遮光處理,并在內部安裝環繞四周的LED燈條。頂蓋用荷葉固定,雙向打開,一側用于檢查和維修電路,另一側用來觀察和調整垃圾桶放過程中投放裝置的運行狀態。
垃圾桶的底部裝在一臺步進電機上,步進電機旋轉將帶動4個垃圾桶進行旋轉,當視覺識別裝置識別出相應的垃圾后,垃圾桶則旋轉到相應的位置。
投放裝置為托盤結構,下端連有二自由度舵機,驅動投放裝置做俯仰運動完成垃圾投放的動作。
3?智能分類垃圾桶軟硬件系統
3.1視覺系統K210
垃圾分類的核心是圖像的處理和識別[6]。不同類型的垃圾具有不同類型的特征,K210首先根據垃圾的形狀、顏色、大小等特點,對大量圖片進行學習,獲取其特征,并自動將學習過的圖片進行存檔保存并建立數據庫。當使用的時候,對投入的垃圾與數據庫中學習過的垃圾進行一一對比,將對比相似系數最高的那一類輸出至單片機系統。
3.2單片機控制系統
系統選用型號為STC89C52RC的單片機作為數據處理中心。作為整個系統的控制大腦,單片機控制步進電機旋轉,帶動垃圾桶旋轉到相應的投放口,并且將超聲波傳感器檢測的距離傳輸讀取,進行滿載提示等。
3.3?智能分類垃圾桶元器件清單表
3.4?智能分類垃圾桶電氣原理圖
4?智能分類垃圾桶視覺程序編寫
4.1?圖片學習方法
第一步:數據采集和轉換。首先,對需要識別的垃圾要拍攝大量圖片,然后存儲于一個?example?文件夾,文件夾中文件命名只能為英文。然后,將圖片分辨率調整為?224×224?格式。
第二步:上傳數據集進行訓練。首先,獲取機器碼。機器碼是通過將一個固件下入?Maix?bit?或者其他?Sipeed?的?K210?獲得。然后,查看獲取的機器碼。打開串口調試器,輸入連接參數,查看機器碼。最后,打開?MaixHub?訓練平臺,填入自己的郵箱和剛剛獲得的機器碼,選擇分類目標識別,上傳數據集,也就是剛剛的*.ZIP?格式文件,點擊開始訓練。
第三步:下載并運行訓練結果。訓練完成,訓練結果會發送到填寫的郵箱中,下載壓縮包,解壓后比較重要的有以下三個文件:第一個文件?boot.py?是測試代碼,第二個文件?labels.txt?是種類,第三個文件?m.kmodel?是模型文件。接下來將上面所有文件下載入?U盤中,用Maixpy?IDE?打開boot.py,用數據線連接開發板,運行腳本,即可看到分類效果
4.2程序編寫
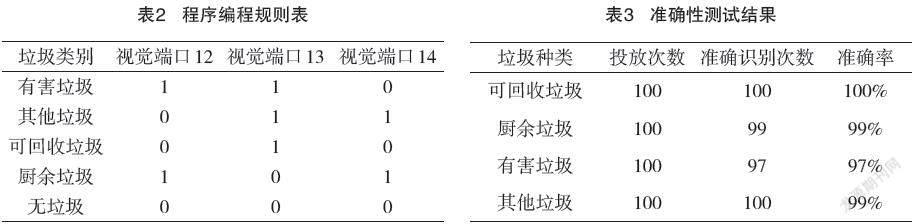
視覺程序編寫依照不同的分類識別編寫程序,如果為四種垃圾的話,將對三個輸出口進行輸出,輸出的信號由單片機進行識別。例如:視覺模塊上硬件接線的三個端口分別是12、13、14。則可以設定為:1為輸出,0為不輸出,規則表見表2所示。最后,在程序中將檢測的結果通過以上表格的數據排列輸出。
5?智能分類垃圾桶單片機程序編寫
5.1接收視覺傳輸過來的信號并處理信號
將視覺三個端口傳輸過來的信號作IF、Then函數,并且定義通道。單片機控制視覺程序主片段如圖3所示。
5.2旋轉步進電機與舵機
根據定義的視覺信號通道,對識別出來的垃圾分類做出相對應的信號,該信號將原先設置好的PWM脈沖波形長度傳輸到步進驅動器,步進驅動器再通過細分調節輸送至步進電機,并且旋轉角度正確。在步進電機旋轉的角度正確后,也就說明垃圾桶已經到達相對應的位置,然后將托盤下的舵機向右旋轉90°,帶動托盤上面的垃圾倒至相對應的垃圾桶中。具體程序略。
5.3滿載檢測
垃圾滿載利用超聲波模塊檢測。超聲波傳感器是利用波形掃描測試距離,根據發出信號和接收回來信號的時間不一樣,進行測試距離。當垃圾桶中的垃圾達到了80%的位置時,系統將認為此垃圾桶已經滿載,并且發出信號。具體程序略。
6?實驗過程及結果分析
- 在實驗中對以下幾種常見的生活垃圾采集數據集并進行訓練。?可回收垃圾:牛奶盒、易拉罐、礦泉水瓶等;廚余垃圾:香蕉皮、蘋果塊、菜葉、橘子皮、辣椒等;有害垃圾:電池(1、2、5、7號)、醫用棉簽、樟腦丸等;其他垃圾:陶瓷片、磚瓦片、煙頭等。?
(2)根據垃圾種類,隨機抽選以上四類垃圾中的10件,依次放入垃圾桶中,記錄分類識別的準確率和識別時間。
(3)對測試結果進行記錄,如表3所示。
從多次實驗結果中可以得出,智能分類垃圾桶對可回收垃圾、廚余垃圾、有害垃圾、其他垃圾的識別平均正確率可達有98.7%,并在湖南省第六屆大學生工程訓練大賽中榮獲省級一等獎1項,二等獎1項。
7?結語
針對目前家庭垃圾分類不徹底甚至不分類的現實問題,該文設計一種基于K210視覺模塊進行目標檢測的智能分類垃圾桶,旨在賦予機器視覺功能,幫助或者有效代替人為分類,實現垃圾分類過程的高效化與智能化。從多次測試數據可以看出,該智能分類垃圾桶識別率高,識別時間短,兼具滿載報警功能,符合設計初衷,有助于緩解垃圾圍城的困境,降低城市垃圾源頭處理成本。
參考文獻
[1] 宋鐵.基于機器視覺的家庭智能分類垃圾桶設計研究[D].上海:東華大學,2019.
[2] 劉齊鋒.基于光電圖像識別的智能垃圾分類技術的研究[D].成都:電子科技大學,2021.
[3] 王鎰杰,趙華,李欣儀,等.我國垃圾分類現狀分析與解決方法[J].機械制造,2018,56(12):?138-139.
[4] 樊肖艷,司闊,馮國慶.?一種基于“圖像+”識別方式的智能垃圾分類裝置[J].電子世界,2021(20):129-131.
[5] 劉文斌,楊代云,李謙.一種智能垃圾分類箱的設計[J].農機使用與維修,2021?(1):?36-39.
[6] 方梓鋒,張鋒.基于K210和YOLOV2的智能垃圾分類平臺[J].自動化與儀表,2021,36(8):102-106.