地鐵全自動駕駛車輛基地自動駕駛區(qū)安全防護(hù)系統(tǒng)研究*
2022-07-15 02:40:04史時喜
城市軌道交通研究 2022年6期
關(guān)鍵詞:作業(yè)
史時喜
(軌道交通工程信息化國家重點實驗室(中鐵一院), 710043, 西安∥正高級工程師)
全自動駕駛(FAO)技術(shù)在城市軌道交通的應(yīng)用越來越廣泛[1],目前國內(nèi)各大城市已將FAO系統(tǒng)建設(shè)納入規(guī)劃[2]。 為此,車輛基地將劃分為人工駕駛區(qū)域和自動駕駛區(qū)域。其中,自動駕駛區(qū)域與正線一樣,需納入FAO模式管理中。列車的運行由信號系統(tǒng)控制完成[3-4],無需人工干預(yù),正常運營期間不允許人員隨意進(jìn)入自動駕駛區(qū)域[5]。但對于列車的日常維護(hù)而言,則不可避免地需要人工駕駛完成,因此作業(yè)人員在該區(qū)域存在人車沖突的安全風(fēng)險,這也造成了自動駕駛區(qū)作業(yè)人員管理的困難[6]。
目前國內(nèi)建設(shè)的FAO車輛基地自動駕駛區(qū)多采用物理隔離措施,依靠人工管理的方式[7]。但該種方式存在非作業(yè)人員誤入作業(yè)區(qū)域、作業(yè)人員滯留作業(yè)區(qū)域等諸多風(fēng)險。針對自動駕駛區(qū)內(nèi)的人員管理,本文提出一種集安全聯(lián)鎖控制、門禁控制、圖像監(jiān)控及安全警示等功能于一體的自動駕駛區(qū)安全防護(hù)系統(tǒng)。
1 地鐵FAO車輛基地自動駕駛區(qū)設(shè)計方案
地鐵FAO車輛基地主要設(shè)施一般包括停車列檢庫、檢修庫、洗車庫、鏇輪庫、調(diào)機(jī)及工程車庫等。車輛基地總圖按照人工駕駛區(qū)和自動駕駛區(qū)分區(qū)布置,如圖1所示。其中,人工駕駛區(qū)包括檢修庫、鏇輪庫、調(diào)機(jī)及工程車庫等;自動駕駛區(qū)包括停車列檢庫、洗車庫等。利用調(diào)機(jī)牽出線兼作轉(zhuǎn)換軌,實現(xiàn)自動駕駛模式與人工駕駛模式信號轉(zhuǎn)換作業(yè)。

圖1 地鐵FAO車輛基地總圖Fig.1 Schematic diagram of metro FAO vehicle base plan
停車列檢庫是自動駕駛區(qū)核心區(qū)域,列車正常運行場景下的入庫、休眠、喚醒、出庫等均無需人工干預(yù)[8];而列車的列檢、清掃等維護(hù)任務(wù)均由人工完成。為保證停車列檢庫安全防護(hù)等級與正線相同,確保列車運行安全,庫內(nèi)列檢等維護(hù)作業(yè)進(jìn)行時,該區(qū)域內(nèi)列車禁止動車、接觸網(wǎng)為斷電狀態(tài)。但停車列檢庫內(nèi)所有列車斷電且禁止動車,會影響列車出入庫的運行效率,進(jìn)而影響正線運行。因此,停車列檢庫按照每2個股道劃分為1個防護(hù)分區(qū),各防護(hù)分區(qū)內(nèi)進(jìn)行列車維護(hù)作業(yè)時,不影響其他防護(hù)分區(qū)內(nèi)列車正常運行。停車列檢庫平面布置如圖2所示。

圖2 停車列檢庫平面布置圖Fig.2 Floor plan of parking maintenance garage
停車列檢庫各防護(hù)分區(qū)之間均設(shè)置了分區(qū)圍欄等隔離設(shè)施,避免其運營期間人員隨意進(jìn)出。為滿足作業(yè)人員的通行,在停車列檢庫中部設(shè)置地下人行通道,并在人行通道對應(yīng)于各防護(hù)分區(qū)處設(shè)置出入口。
2 自動駕駛區(qū)存在問題及其解決思路
自動駕駛區(qū)雖設(shè)置了分區(qū)隔離設(shè)施,但在安全管理上主要還是采用人工配合視頻監(jiān)控的方式,存在一定的安全風(fēng)險。主要問題包括以下幾點:
1) 人員進(jìn)出管理完全依賴門衛(wèi)和視頻監(jiān)控,不可避免地出現(xiàn)人員誤入和滯留的問題。
2) 各分區(qū)出入口的開關(guān)未與列車信號、接觸網(wǎng)等系統(tǒng)進(jìn)行聯(lián)鎖,作業(yè)時存在安全隱患。
針對自動駕駛區(qū)內(nèi)人員管理存在的相關(guān)問題,本文提出一種集門禁管理、安全聯(lián)鎖控制、實時監(jiān)控、人員防護(hù)等功能于一體的安全防護(hù)系統(tǒng)。安全防護(hù)系統(tǒng)結(jié)合自動駕駛區(qū)物理隔離方案,利用多種檢測手段和邏輯聯(lián)鎖控制方法嚴(yán)格控制人員進(jìn)出,以實現(xiàn)在列車正常運行情況下自動駕駛區(qū)無人員通行,以及在人員維護(hù)作業(yè)情況下列車禁止動車的目標(biāo)。
3 車輛基地自動駕駛區(qū)安全防護(hù)系統(tǒng)
車輛基地自動駕駛區(qū)安全防護(hù)系統(tǒng)通過中樞與列車信號、隔離開關(guān)、門禁等系統(tǒng)進(jìn)行自動聯(lián)鎖,并將信息呈現(xiàn)給調(diào)度人員,保證列車維護(hù)作業(yè)安全、有序進(jìn)行[9]。
安全防護(hù)系統(tǒng)設(shè)有1個主控系統(tǒng),通過主控系統(tǒng)銜接門禁控制子系統(tǒng)、安全聯(lián)鎖控制子系統(tǒng)、視頻監(jiān)控及人員定位子系統(tǒng)、顯示調(diào)度子系統(tǒng)等。每個子系統(tǒng)通過主控系統(tǒng)和其他子系統(tǒng)形成互鎖機(jī)制,所有子系統(tǒng)都依托主控系統(tǒng)運行,當(dāng)主控系統(tǒng)發(fā)生故障后,其他子系統(tǒng)將無法運行。
車輛基地DCC(控制中心)負(fù)責(zé)對車輛基地的行車、車輛檢修、接觸網(wǎng)斷送電等基地內(nèi)的所有生產(chǎn)作業(yè)進(jìn)行全面調(diào)度管理[10]。車輛基地自動駕駛區(qū)安全防護(hù)系統(tǒng)主要承擔(dān)車輛基地DCC檢修調(diào)度中的部分功能。該控制中心可通過各子系統(tǒng)的功能實現(xiàn)接觸網(wǎng)斷送電記錄、臺位占用統(tǒng)計、隔離開關(guān)狀態(tài)及檢修區(qū)域人員滯留情況顯示,并通過各子系統(tǒng)的邏輯聯(lián)鎖進(jìn)一步保障車輛及人員作業(yè)安全。車輛基地內(nèi)有調(diào)車需求時,由車場調(diào)度向OCC(運營控制中心)申請,車場檢修調(diào)度提供可用的車輛數(shù)量及車輛檢修計劃;負(fù)責(zé)正線列車調(diào)度的ATS(列車自動監(jiān)控)系統(tǒng)提供列車運行圖信息,結(jié)合本系統(tǒng)提供的車輛停留、臺位占用、隔離開關(guān)狀態(tài)、防護(hù)分區(qū)內(nèi)作業(yè)人員狀態(tài)等信息,綜合產(chǎn)生調(diào)車計劃。
車輛基地自動駕駛區(qū)安全防護(hù)系統(tǒng)的結(jié)構(gòu)如圖3所示。

圖3 車輛基地自動駕駛區(qū)安全防護(hù)系統(tǒng)結(jié)構(gòu)圖Fig.3 Structural diagram of vehicle base automatic driving area safety protection system
3.1 門禁控制子系統(tǒng)
停車列檢庫中各防護(hù)分區(qū)出入口處均設(shè)置門禁控制子系統(tǒng)(見圖4)。

圖4 門禁控制子系統(tǒng)Fig.4 Access control subsystem
門禁控制子系統(tǒng)由門禁控制主機(jī)、指紋識別儀、狀態(tài)指示燈、門鎖、防尾隨系統(tǒng)等組成,每個防護(hù)分區(qū)的門禁控制子系統(tǒng)彼此獨立。門禁控制子系統(tǒng)具有生物識別功能,提前錄入作業(yè)人員信息,并與檢修作業(yè)計劃管理等系統(tǒng)關(guān)聯(lián)。當(dāng)進(jìn)入門禁控制區(qū)的人員無作業(yè)任務(wù)或作業(yè)任務(wù)與該作業(yè)區(qū)域不符時,禁止打開門鎖。門禁控制子系統(tǒng)還具有計數(shù)與防尾隨功能,采用光電傳感器-智能圖像分析技術(shù),統(tǒng)計出、入防護(hù)分區(qū)人員的數(shù)量,確保出、入防護(hù)分區(qū)人員一致;當(dāng)發(fā)生尾隨時,現(xiàn)場聲光報警并自動記錄尾隨錄像,同時通過語音提示調(diào)度室,調(diào)度人員可通過調(diào)取尾隨視頻進(jìn)行確認(rèn)。
門禁控制子系統(tǒng)與接觸網(wǎng)是否帶電邏輯聯(lián)鎖,當(dāng)作業(yè)分區(qū)隔離開關(guān)未分閘或接地桿未接地時,該分區(qū)門禁禁止開放,實現(xiàn)了作業(yè)分區(qū)的供電安全,并通過顯示調(diào)度系統(tǒng)實時顯示該分區(qū)接觸網(wǎng)帶電狀態(tài)與人員狀態(tài),從多角度保證作業(yè)分區(qū)的人員安全。
3.2 安全聯(lián)鎖控制子系統(tǒng)
安全聯(lián)鎖控制子系統(tǒng)主要實現(xiàn)信號、隔離開關(guān)、接地、門禁等設(shè)施間的互聯(lián)互鎖。該系統(tǒng)主要由操作終端、接口柜、車位傳感器、報警設(shè)備等組成,各防護(hù)分區(qū)安全聯(lián)鎖控制子系統(tǒng)彼此獨立。操作終端是安全聯(lián)鎖控制子系統(tǒng)的人機(jī)接口,通常置于調(diào)度控制室,用于設(shè)備操作員進(jìn)行確認(rèn)操作。接口柜內(nèi)設(shè)置有安全繼電器和相關(guān)的安全邏輯控制單元,用于接收操作終端的指令并驅(qū)動隔離開關(guān)、信號機(jī)等動作,并采集相關(guān)設(shè)備狀態(tài)發(fā)送給操作終端。車位傳感器用于檢測車輛是否到達(dá)庫門前和是否駛?cè)肱_位。報警設(shè)備用于警示該系統(tǒng)相應(yīng)的動作狀態(tài)和其他不正常的狀態(tài)。各設(shè)施之間的聯(lián)鎖關(guān)系如下:
1) 合閘條件如下:門禁控制子系統(tǒng)檢測自動駕駛區(qū)無人;監(jiān)護(hù)員通過視頻監(jiān)控認(rèn)為可以合閘(受電弓升弓);自動接地桿已摘(收到位);按下報警按鈕后,聲光報警響30 s同時進(jìn)行廣播提示。上述條件均具備,且可合閘紅色指示燈亮后,按下隔離開關(guān)閉合按鈕,隔離開關(guān)才能閉合。
2) 監(jiān)護(hù)員通過視頻監(jiān)控認(rèn)為可以分閘(受電弓降弓),按下報警按鈕后,聲光報警響30 s;同時進(jìn)行廣播提示,分閘黃色指示燈亮后,按下隔離開關(guān)斷開按鈕,隔離開關(guān)才能斷開。
3) 隔離開關(guān)合閘,則隔離開關(guān)合閘紅燈亮,LED(發(fā)光二極管)顯示屏顯示“有電”,相應(yīng)股道檢修臺位的作業(yè)門鎖閉,作業(yè)門指示燈紅燈亮。
4) 當(dāng)隔離開關(guān)分閘且自動接地桿接地,以及LED顯示屏顯示“無電”、門禁作業(yè)門解鎖、作業(yè)指示燈綠燈亮?xí)r,作業(yè)人員方可刷卡進(jìn)入防護(hù)分區(qū)。
5) 隔離開關(guān)分閘到位并驗證無電,且經(jīng)操作人員確認(rèn)后,自動接地桿可以掛桿。
6) 隔離開關(guān)分閘到位并驗證無電,防護(hù)分區(qū)無人員作業(yè),經(jīng)操作人員確認(rèn)后,自動接地桿可以摘桿。
隔離開關(guān)閉合和分閘操作與門禁狀態(tài)、接觸網(wǎng)帶電狀態(tài)、庫內(nèi)動車信號等的聯(lián)鎖關(guān)系如圖5~6所示。
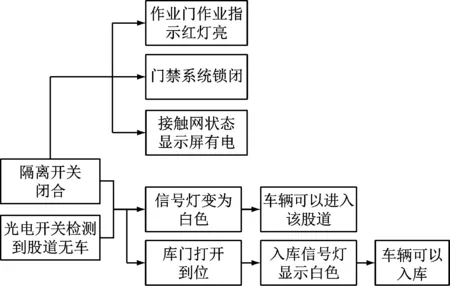
圖5 隔離開關(guān)閉合安全聯(lián)鎖關(guān)系示意圖
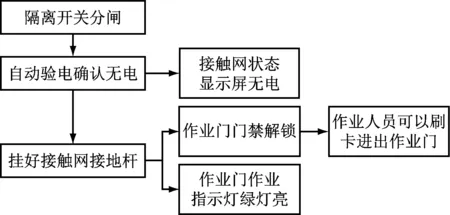
圖6 隔離開關(guān)分閘安全聯(lián)鎖關(guān)系示意圖
3.3 視頻監(jiān)控及人員定位子系統(tǒng)
視頻監(jiān)控及人員定位子系統(tǒng)主要實現(xiàn)對安全防護(hù)系統(tǒng)防護(hù)分區(qū)內(nèi)作業(yè)人員及其他狀態(tài)的實時監(jiān)控,以便調(diào)度人員了解現(xiàn)場情況并及時做出響應(yīng)。該系統(tǒng)由圖像監(jiān)控主機(jī)、圖像監(jiān)控終端、攝像機(jī)、人員定位裝置等組成。在作業(yè)區(qū)域安裝高清攝像槍機(jī)和球機(jī)對作業(yè)情況進(jìn)行監(jiān)視,并通過光端機(jī)傳輸至設(shè)備機(jī)房,然后進(jìn)行數(shù)字視頻的編碼和網(wǎng)絡(luò)傳輸。采用RFID(射頻識別)跟蹤定位技術(shù)和UWB(超寬帶)無線定位通信技術(shù),對作業(yè)人員在作業(yè)區(qū)間進(jìn)行精確定位,定位精度在1 m以內(nèi)。同時通過數(shù)據(jù)庫對攝像機(jī)在庫內(nèi)的拍攝位置數(shù)據(jù)與定位數(shù)據(jù)進(jìn)行處理,并將攝像機(jī)和定位系統(tǒng)進(jìn)行關(guān)聯(lián),記錄檢修位置和檢修作業(yè)視頻。視頻監(jiān)控及人員定位子系統(tǒng)的現(xiàn)場布置如圖7所示。

圖7 視頻監(jiān)控及人員定位子系統(tǒng)現(xiàn)場布置
3.4 顯示調(diào)度子系統(tǒng)
顯示調(diào)度子系統(tǒng)以PLC(可編程邏輯控制器)網(wǎng)絡(luò)控制系統(tǒng)為核心,通過自動檢測設(shè)備,對車輛停留、臺位占用、隔離開關(guān)位置、接地狀態(tài)、防護(hù)分區(qū)內(nèi)有無人員及作業(yè)人員狀態(tài)等信息進(jìn)行自動讀取和記錄,在調(diào)度室的顯示終端大屏上進(jìn)行實時顯示。該系統(tǒng)主要由顯示調(diào)度主機(jī)、調(diào)度顯示屏、音頻廣播系統(tǒng)、操作臺、微機(jī)柜及各級檢測單元等組成。
調(diào)度控制軟件運行后,軟件界面可顯示下列信息:車輛進(jìn)出狀態(tài),隔離開關(guān)分合閘狀態(tài),自動接地桿接地狀態(tài),安全作業(yè)門指示燈狀態(tài)。系統(tǒng)的顯示界面根據(jù)庫內(nèi)狀態(tài)實時變化,調(diào)度人員可以觀察庫內(nèi)各股道列檢臺位的作業(yè)情況,見圖8。

圖8 顯示調(diào)度子系統(tǒng)軟件界面Fig.8 Software interface of dispatching display subsystem
4 安全防護(hù)系統(tǒng)的應(yīng)用效果
以南寧市某地鐵車輛基地建設(shè)項目為依托,對該項目自動駕駛區(qū)的安全防護(hù)系統(tǒng)進(jìn)行了測試,發(fā)現(xiàn)該系統(tǒng)實現(xiàn)了作業(yè)分區(qū)出入口的門禁自動化管控,具體表現(xiàn)為:該系統(tǒng)能夠在無人值守情況下,準(zhǔn)確統(tǒng)計出入人員數(shù)量,有效防止人員尾隨;實時監(jiān)控作業(yè)區(qū)域信號及接觸網(wǎng)帶電狀態(tài),對作業(yè)人員進(jìn)行安全警示,一旦出現(xiàn)異常狀態(tài)立即進(jìn)行警示,并通知對應(yīng)管理人員;通過視頻監(jiān)控系統(tǒng)與人員定位系統(tǒng),實時定位自動駕駛區(qū)內(nèi)人員位置,并實時顯示在調(diào)度中心的顯示終端;通過主控系統(tǒng)銜接及邏輯聯(lián)鎖控制,使得各子系統(tǒng)之間相互協(xié)作。由此可見,車輛基地安全防護(hù)系統(tǒng)從硬件控制、人員管理等多個角度全方位保障自動駕駛區(qū)作業(yè)過程中人車安全的同時,起到了減員、增效的作用。
5 結(jié)語
本文通過對當(dāng)前地鐵FAO車輛基地自動駕駛區(qū)的安全管控現(xiàn)狀進(jìn)行分析,針對存在的安全隱患,針對性地提出了以信息化、智能化技術(shù)為核心的安全防護(hù)系統(tǒng),有效彌補了傳統(tǒng)車輛基地自動駕駛區(qū)人員管控與安全防護(hù)的短板。通過預(yù)留接口,實現(xiàn)了安全防護(hù)系統(tǒng)與車輛基地內(nèi)其他管理系統(tǒng)的數(shù)據(jù)聯(lián)通與功能互補,為車輛、設(shè)備及人員的安全提供了有力保障。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
