真空斷路器永磁機構的模擬試驗研究
2022-07-14 10:03:18王淑強
機械管理開發 2022年6期
王淑強
(山西潞安配售電有限公司, 山西 長治 046204)
引言
煤礦供電系統為煤礦生產的主要動力源,鑒于綜采工作面相對復雜且惡劣的生產環境,煤礦供電網絡時常會發生漏電、短路的故障,從而影響綜采工作面的正常生產任務。若對煤礦供電網絡中的故障無法進行及時、快速地排除,極易對現場作業人員和設備造成嚴重的后果。真空斷路器為保護工作面電網的重要設備,其核心部件為操作機構,傳統操作機構存在結構復雜、可靠性低且分散性較大的問題,使得真空斷路器的性能降低[1]。因此,本文以永磁機構替換傳統操作機構提高真空斷路器的性能,重點解決傳統真空斷路器動作時間長、可靠性低以及分散性大的問題。
1 真空斷路器永磁機構的設計
1.1 永磁機構結構形式的確定
基于永磁機構的真空短路器主要包括真空滅弧室、永磁機構和相關控制分系統。永磁真空斷路器基于其內部的真空滅弧室的動觸頭和靜觸頭的關閉和開合實現對永磁機構的智能化控制。為保證永磁式真空斷路器充分保證供電網絡的安全運行,要求永磁機構不僅可適應真空滅弧室的工作要求,而且還必須兼備便于控制的特點[2]。
目前,根據永磁機構結構的不同可分為單穩態永磁機構和雙穩態永磁機構,二者的基本結構分別如圖1、圖2 所示。
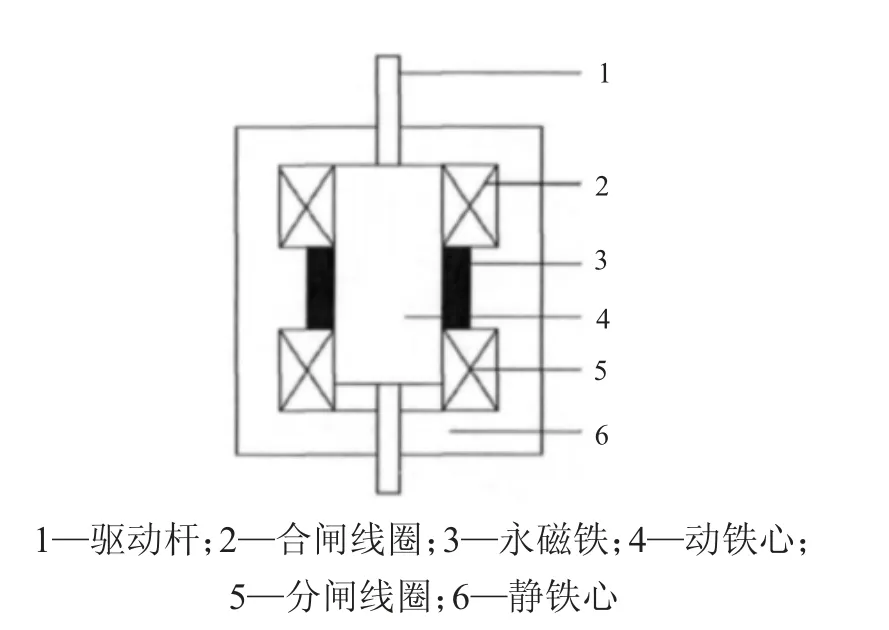
圖1 雙穩態永磁機構結構示意圖
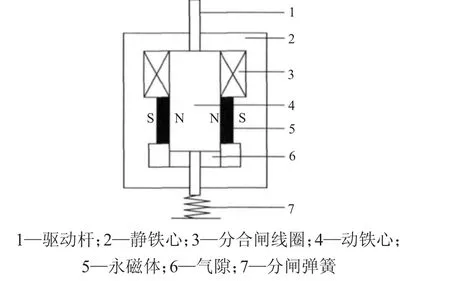
圖2 單穩態永磁機構結構示意圖
綜合對比單穩態永磁機構和雙穩態永磁機構的優劣勢,可總結為如下幾點:
1)相比雙穩態永磁機構,單穩態永磁機構合閘時還需克服彈簧的拉力,即單穩態永磁機構的合閘保持力要求較大;
2)單穩態永磁機構在實際應用過程中存在永磁體退磁的風險;
3)雙穩態永磁機構相比單穩態永磁機構能夠更好適應并滿足斷路器分閘特性較高的場合應用要求[3]。
綜上,永磁式真空斷路器應選用雙穩態永磁機構為核心完成設計。
1.2 真空斷路器雙穩態永磁機構參數的確定
雙穩態永磁機構的各項參數指標需要結合真空滅弧室的具體要求確定,包括觸頭行程、超行程、觸頭壓力、分閘合閘速度等參數,最終完成雙穩態永磁機構靜動鐵心、永磁體以及線圈等結構的確定[4]。本文所設計的雙穩態永磁機構應用的真空滅弧室的相關參數如下頁表1 所示。
結合表1 中真空滅弧室的相關指標要求,可得出雙穩態永磁機構中永磁體的保持力應為3980 N,對應的動鐵心行程為13 mm。結合相關理論計算公式,參照上述相關指標要求得出雙穩態永磁機構靜動鐵心、永磁體以及線圈等結構的具體參數如下頁表2 所示。
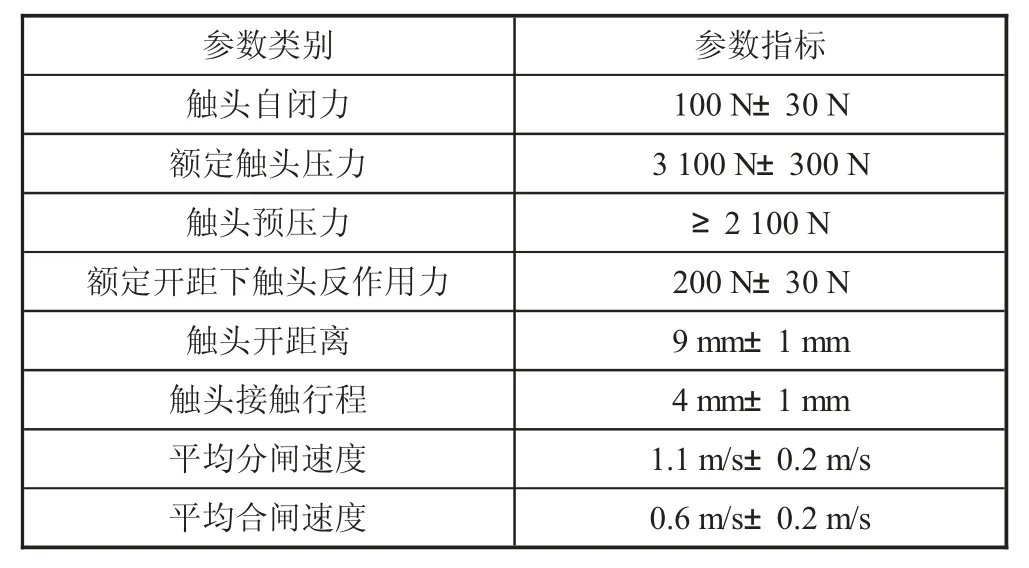
表1 真空滅弧室關鍵參數
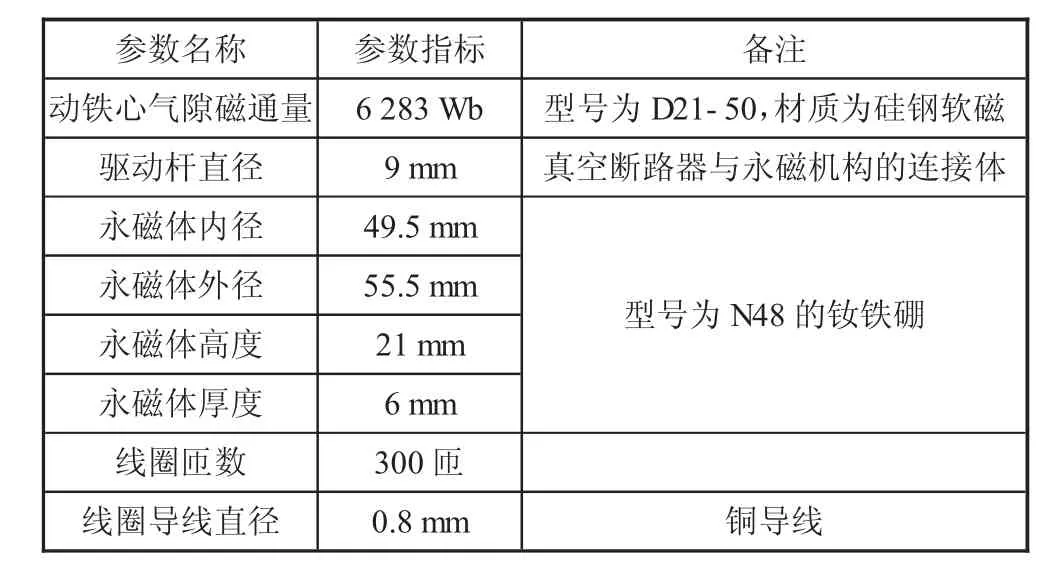
表2 雙穩態永磁機構結構參數
綜合上述雙穩態永磁機構各部件的結構尺寸得出雙穩態永磁機構的基本結構。
2 永磁機構控制系統的設計與模擬試驗研究
為驗證所設計雙穩態永磁機構的性能,本小節將針對雙穩態永磁機構設計相應的控制系統的模擬試驗平臺對其關鍵性能進行測試。
2.1 雙穩態永磁機構控制系統的設計
雙穩態永磁機構控制系統由各種電路和DSP 中央控制器組成,控制系統結構如圖3 所示。
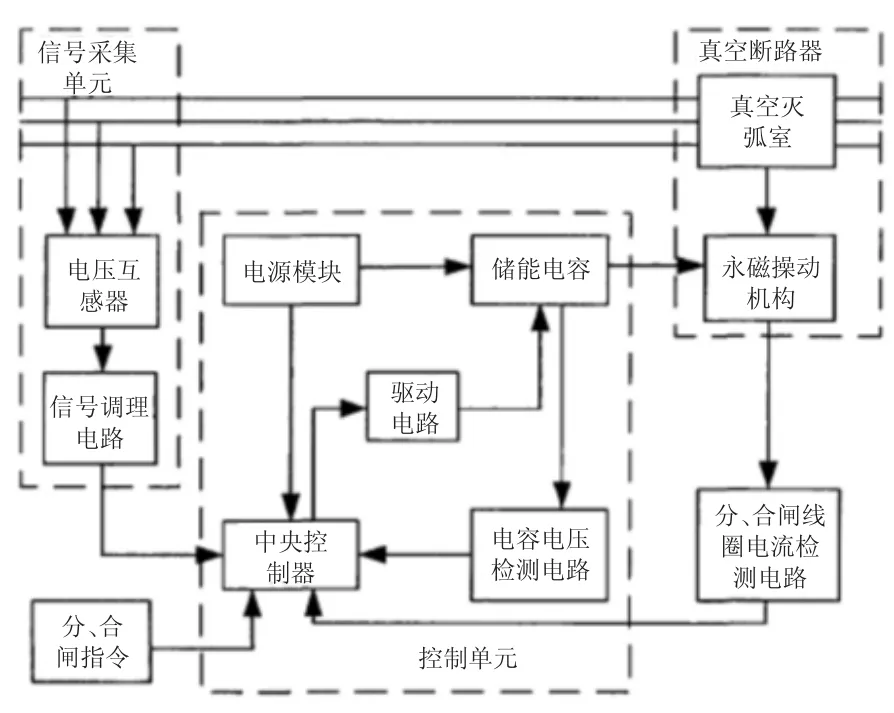
圖3 雙穩態永磁機構控制系統結構框圖
如圖3 所示,雙穩態永磁機構控制系統可分為信號采集單元、真空斷路器、控制單元三部分。在信號采集單元,電壓互感器對線路中的模擬電壓信號進行采集,并經由處理器對其進行調理后得出符合范圍要求的模擬信號;在控制單元中,儲能電容的主要功能為對雙穩態永磁機構的線圈進行供電。
在實際生產中,控制系統在初始化完成后首先檢測儲能電容是否完成充電任務;儲能電容充電完成后永磁機構中的線圈可否正常工作。然后,信號采集單元對供電網絡中的電壓進行實時采集,重點對電壓的相位角進行分析判斷為真空斷路器的分閘和合閘操作提供依據。最后,基于永磁機構的滯環控制算法判斷分閘和合閘線圈是否斷電,當斷電后即一個控制流程結束。
2.2 真空斷路器永磁機構模擬試驗
在上述真空斷路器永磁機構結構參數完成設計和相關控制系統完成設計的基礎上搭建模擬測試試驗平臺對其性能進行驗證,重點對真空斷路器永磁機構合閘線圈的電流波形、合閘速度等指標進行驗證;與此同時,基于MATLAB 軟件建立仿真模型,從理論層面對真空斷路器永磁機構的性能進行驗證。試驗和模擬的對比結果如表3 所示。
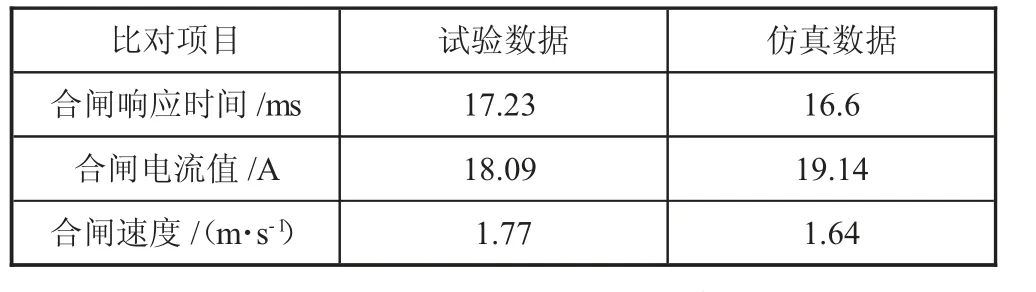
表3 真空斷路器永磁機構試驗與仿真結果對比
如表3 所示,基于MATLAB 仿真軟件所得的數據在各方面均優于實測數據,這是由于在現場試驗過程受到各方面因素的干擾使其存在一定的誤差。但是,仿真數據與試驗數據之間的誤差在合理范圍之內[5]。因此,所設計的真空斷路器永磁機構能夠在實際生產中推廣應用,并從根本上解決了傳統斷路器操作機構可靠性低、反應速度慢,分散性大的問題。
3 結論
煤礦供電系統為保證工作面各類大中型設備安全、穩定、可靠運行的基礎,煤礦供電網絡的穩定運行需要各類設備提供保障。真空斷路器為供電網路出現漏電、短路等故障的主要保護設備,本文針對其完成了永磁機構的設計并對其性能進行驗證,總結如下:
1)雙穩態永磁機構在合閘保持力、退磁風險以及斷路器分閘特性要求等方面均優于單穩態永磁機構;
2)結合真空滅弧室的具體要求,并依據相關理論計算公式完成了雙穩態永磁機構結構參數的設計;
3)基于設計好的永磁機構為其配置基于DSP 控制器的控制系統,并搭建模擬試驗平臺得出所設計的永磁機構能夠滿足實際生產的要求,并有效解決了傳統操作機構可靠性低、反應速度慢,分散性大的問題。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50