基于改進蝙蝠算法的激光供能無人機MPPT技術
2022-07-10 08:41:20袁建華趙子瑋何寶林
激光與紅外 2022年6期
袁建華,王 林,趙子瑋,何寶林,劉 宇
(三峽大學電氣與新能源學院,湖北 宜昌 443000)
1 引 言
無人機(UAV)是一種無線遠程受控的非載人飛行器,具有體積小、成本低、空中操作方便等優點[1]。UAV在軍事應用有顯著的優越性,如偵察預警、跟蹤定位、特種作戰、執行搜救等各類戰略和戰術任務,然而早期的無人機工作時間短,續航能力差,偵察監視區域有限,不能連續獲取信息,使無人機在軍事應用上受到了很大限制。目前無線能量傳輸主要有諧振耦合、電場耦合、電磁感應、微波、太陽能和激光六種方式[2]。無人機執行任務時周圍一般多有電磁干擾,利用太陽能供能無人機受天氣影響較大,如陰雨霧霾、晝夜交替等。激光能量密度高、傳輸功率大與太陽能相比,激光供能顯然受天氣因素影響小很多,更適用于無人機上光伏電池板能量的接收,由此關于無人機激光供能的相關概念被提出。目前許多研究人員都致力于研究改善無人機激光供能技術。文獻[3]設計了一套給無人機充電的太陽能無線充電裝置,并對裝置的充電效率進行了測試,確定了無線充電裝置的最優參數設定;文獻[4]通過分析激光跟瞄系統的模型,對可能產生影響的誤差因素進行了分析并進行了誤差分配,為后續無人機激光無線充電提供了理論參考;文獻[5]對無人機激光充電系統的構成及工作過程和原理進行了闡述,并對后續的研究進行了一定的方向指導;文獻[6]針對無人機光伏接收器應滿足的條件,并在其五個主要因素方面進行了分析,為無人機無線供能系統中光伏接收器的研究提供了前提。以上文獻均是關于無人機無線充電系統的基礎理論研究,但是關于激光供能無人機效率問題還鮮有研究,本文針對激光供能無人機時最大功率點追蹤的問題,提出了一種改進的蝙蝠算法,以快速追蹤最大功率,改善了追蹤的快速性和穩定性。
2 激光無線供能系統構成
無人機激光無線供能系統由激光發射系統和激光接收系統構成。其中激光發射系統由電源、激光發射器、能量傳輸路徑、跟蹤瞄準裝置等構成;激光接收系統由光伏電池板,儲能裝置等構成[7]。系統工作原理為:跟蹤瞄準裝置確定無人機的空間位置并給激光發射器發射指令,激光發射器沿指定的能量傳輸路徑發射激光,光伏電池板接收發射的激光并將光能轉化為電能,一部分用于無人機的現時工作,一部分傳送到儲能裝置中以供無人機的長時續航。

圖1 激光無線供能系統框圖
3 光伏陣列數學模型
光伏電池是將光能轉化為電能的一種能量轉化裝置,其輸出特性受溫度和光照強度的影響[8],多個光伏電池通過串并聯組成光伏陣列,其數學模型如圖2所示。
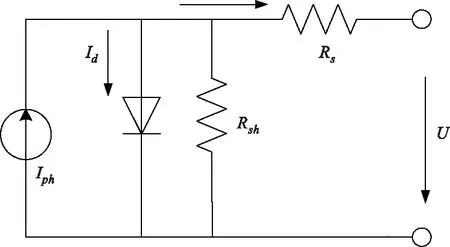
圖2 光伏陣列單元等效電路
根據圖2知光伏陣列的等效模型[9]為:
(1)
式中,I、U為光伏電池輸出電流和電壓;Iph為光伏電池光生電流,其值大小受光照強度影響;Id為光伏電池反向飽和電流,其值受溫度影響;q為電荷常數,1.6×10-19C;A為二極管理想系數,其值通常在1~2變化;K為玻爾茲曼常數,1.38×10-23J∕K;T為熱力學溫度;Rs為光伏陣列串聯等效電阻。
單個光伏電池產生的電壓無法滿足無人機的需要,所以無人機上光伏電池板都是多個光伏電池串并聯組成的,故光伏電池陣列輸出特性方程為:
(2)
式中,np,ns分別為光伏電池并聯和串聯的數目。
光伏陣列為非線性電源,并且光照強度對光伏電池板輸出特性遠大于溫度對其的影響。在一定條件下其輸出特性曲線隨著電壓的增大其輸出功率先增大后減小,因此輸出特性曲線峰值頂點即為最大輸出功率。
當光伏電池板受外界環境影響出現局部陰影時,P-V輸出特性曲線更為復雜,其值取決于陰影部分與無陰影部分光照強度之差異[9-10]。為模擬光伏陣列出現局部陰影的情況,本文采用單位光伏陣列不同光照強度的方法,分別為1000 W/m2、8000 W/m2、600 W/m2,此時其光伏陣列P-V輸出特性曲線為圖3,由圖可知,當光伏陣列出現局部陰影時,其P-V輸出特性曲線會出現多個局部最大值[10-12]。在保證激光最大范圍垂直入射到光伏電池板上的情況下,光伏電池陣列的光電轉化效率可以通過采用最大功率跟蹤算法實現光電轉化效率最大。

圖3 局部陰影下光伏陣列的P-V特性
4 蝙蝠算法
蝙蝠算法參數簡單,準確度高,收斂效果好,可并行處理等[13]。其簡要步驟如下:
1) 初始化蝙蝠群體,包括種群規模M,迭代次數N,目標函數f(X),蝙蝠位置xi(i=1,2,…,m),蝙蝠的飛行速度vi,脈沖頻率ri,聲波頻率fi和聲波響度Ai;
2) 找出此時種群中最佳蝙蝠個體所處位置X*;
3) 對第i只蝙蝠的位置和速度進行更新;
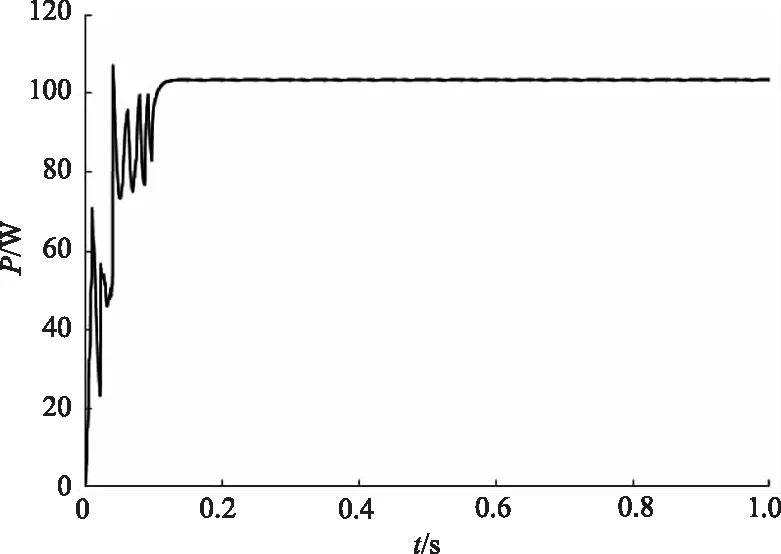
4) 生成隨機數rand1,判斷rand1 5) 如果在當前最佳解決方案中選擇其中一種,新的解使用隨機游走方式生成; 6) 生成隨機數rand2,其中rand2∈[0,1]為滿足隨機分配的隨機數,判斷rand2 7) 判斷新位置是否優于當前最佳位置,如果不滿足條件,則當前最佳位置不變,否則,新位置更換為最佳位置,并執行第8步; 9) 判斷是否滿足終止迭代條件,如果滿足優化搜索結束,否則執行第2步。 傳統蝙蝠算法易陷入局部最優,同時算法后期收斂速度不理想,針對蝙蝠算法存在的以上問題做出如下改進。 蝙蝠算法早期采用隨機方式進行種群初始化,具有很大的隨機性,這使得算法在尋優過程中有陷入局部最優解的可能性。近年來提出反向學習的初始化很好應對了此問題,反向學習利用搜索反向解空間來擴大搜索范圍能夠有限避免早熟,提高了算法全局尋優的能力[14]。 蝙蝠算法下一次的速度、位置、頻率由上一次的結果迭代產生,在算法后期全局最優解處于某一區域并不斷迭代,存在過分迭代的現象,影響收斂速度。本文根據隨機位置和最優位置進行搜索并不斷更新[15],降低局部過分迭代發生的概率。位置更新公式為: xit=ε×(Xit-1+f2t×rand×(best-Xit-1)+ f1t×rand×(prand-Xit-1)) (3) (4) 收縮因子ε的公式為: (5) phi=4×(f1t+f2t) (6) f1t=1-e(-|Fbest(t)-Fave(t)|×rand) (7) f2t=1.1-f1t (8) (9) 響度、脈沖頻率計算公式為: (10) (11) 改進的蝙蝠算法在種群分布均勻性及追蹤速度等方面有了明顯,算法具體步驟如下: 1) 關于種群規模M、初始響度A0、聲波頻率f1t、f2t、目標函數f(x)等初始值的設定; 2) 基于反向學習進行種群的初始化,蝙蝠初始位置為x0,搜索蝙蝠種群中最佳蝙蝠所處的位置best,計算其適應度值Fbest(t),同時計算蝙蝠種群平均適應度值Fave(t); 7) 計算所有蝙蝠適應度值并進行排列評估,最佳蝙蝠所處位置即最優解; 8) 判斷是否滿足終止迭代條件,如果滿足條件則搜索結束,否則返回第3步。 圖4 改進蝙蝠算法流程圖 在Matlab/Simulink中進行仿真驗證本文所提算法的有效性,以蝙蝠算法與本文改進蝙蝠算法對最大功率跟蹤時間t及目標函數P=UI進行對比,使用Boost升壓電路,光伏陣列處于溫度T=25 ℃、光照強度E=1000 W/m2、開路電壓UOC=22 V、短路電流ISC=7.6 A,仿真模型如圖5所示[8]。 圖5 基于Boost電路的MPPT控制系統框圖 算法參數的設置對收斂速度及全局搜索能力有較顯著影響。種群規模較大時,算法以較大可能性搜索全局最優解,種群規模較小時,算法在短時間很難收斂到全局最優解;在算法迭代前期,f1t比f2t大,傾向于追新部分學習,同時脈沖響度A值一般較大,此設置提高了算法全局搜索能力;在算法后期局部搜索時,f2t比f1t大,傾向于選擇已有的最優解,脈沖響度A值一般較小,共同保證了算法局部搜索能力。基于以上參數特性為提高算法收斂的速度性和穩定性并進行多次實驗確定算法初始值如下:M=170,A0=1,f10=80,f20=30,P0=0。 改進蝙蝠算法滿足以下兩者其一則迭代終止:第一,算法總迭代次數達到最大迭代次數,本算法設定最大迭代次數N=100;第二,連續無效迭代次數達到總迭代次數的1/3,當多次無效迭代時說明收斂速度很慢或目標丟失,則迭代終止。 當光伏陣列處于溫度T=25 ℃、光照強度E=1000 W/m2時,此時光伏陣列有一個極大值點,圖6和圖7分別為采用蝙蝠算法和改進蝙蝠算法進行的最大功率追蹤,由圖可知,采用蝙蝠算法追蹤到最大功率點所用時間t=0.22 s,最大功率P=172.5 W;改進蝙蝠算法追蹤到最大功率點所用時間t=0.15 s,最大功率P=173.6 W。改進后的蝙蝠算法追蹤到最大功率點時間縮短且功率波動較小,系統振蕩幅度降低。 當溫度T=25 ℃、光伏陣列平均劃分三個區域分別處于光照強度E=1000 W/m2、500 W/m2、300 W/m2時,采用蝙蝠算法和改進蝙蝠算法進行最大功率追蹤,由圖8和圖9可知在局部陰影情況下,蝙蝠算法追蹤到最大功率點所用時間t=0.23 s,最大功率P=104.2 W;改進蝙蝠算法追蹤到最大功率點所用時間t=0.13 s,最大功率P=105.7 W,改進的蝙蝠算法在快速性和穩定性有了明顯改善。 圖6 光照均勻下蝙蝠算法仿真結果 圖7 光照均勻下改進蝙蝠算法仿真結果 圖8 局部陰影下蝙蝠算法仿真結果 針對外界環境出現變化的情況,本文設定當t=0 s時,光照強度E=[600,600,600]W/m2;t=0.5 s時,光照強度E=[300,300,300]W/m2,采用蝙蝠算法與改進蝙蝠算法的進行對比仿真。由圖10和圖11可知蝙蝠算法在外界環境變化時追蹤到首次最大功率點所用時間t=0.26 s,最大功率點P=90.3 W,t=0.5 s時光照變化,t=0.77 s時再次追蹤到最大功率點,P=39.8 W;改進蝙蝠算法在外界環境變化時追蹤到首次最大功率點所用時間t=0.15 s,最大功率點P=90.8 W,t=0.5 s時光照變化,t=0.63時再次追蹤到最大功率點P=41.2 W。 圖9 局部陰影下改進蝙蝠算法仿真結果 圖10 環境動態變化時蝙蝠算法仿真結果 圖11 環境動態變化時改進蝙蝠算法仿真結果 本文針對激光供能無人機過程中傳統算法收斂速度慢、易陷入局部最優等問題,提出了改進的蝙蝠算法,通過在蝙蝠算法中引入反向學習及收縮因子進行位置更新,優化種群并加快收斂速度。最后通過仿真結果證明改進蝙蝠算法光伏電池板局部遮蔭和外界環境動態變化情況下跟蹤速度更快、振幅更小,為不同環境下激光供能無人機的效率提供了保障。
5 改進蝙蝠算法及其在激光供能無人機MPPT技術中的應用
5.1 基于反向學習策略的初始化階段
5.2 引入收縮因子的位置更新





6 仿真及分析

6.1 光照均勻下最大功率追蹤
6.2 局部陰影下最大功率追蹤



6.3 外界環境動態變化情況下最大功率追蹤


7 結 論
