基于激光微多普勒效應的空間碎片探測技術研究
2022-07-07 13:43:48張勇司紅利楊振郭鑫民張建隆
空間碎片研究 2022年1期
關鍵詞:信號
張勇,司紅利,楊振,郭鑫民,張建隆*
(1.哈爾濱工業大學航天學院,哈爾濱 150001;2.火箭軍裝備部駐哈爾濱地區軍事代表室,哈爾濱 150028)
1 引言
空間碎片近幾年一直是國內外航天界比較關注的問題,關乎地球周邊空間環境安全與治理。人類空間發射密度逐年遞增,造成越來越多的空間碎片遺留在地球軌道上。截至2020年5月底,近地軌道能夠被跟蹤編目的10cm以上的空間碎片數量已經超過20000個,10cm以下的空間碎片數目更多。對于數目還在不斷增長的空間碎片的遠距離和高精度探測是對其能夠進行有效編目監管以及清除的技術基礎。
目前,空間碎片探測主要分為地基探測和天基探測兩類。地基探測主要利用地面建設的天文望遠鏡或雷達站,通過直接觀測方式獲取空間碎片的軌道信息,但地基偵察監視存在容易受大氣傳播抖動、蒙氣差、電離閃爍等不利因素的影響,空間分辨率低和作用距離近,無法完成對小尺寸空間碎片的精確定軌和微小碎片的視場捕獲。天基探測主要利用安裝在航天器上的雷達、望遠鏡以及光學傳感器等對空間碎片進行探測,規避了大氣影響,但受到在軌飛行器對其體積和重量的限制。
目前人們對空間碎片的探測主要關注于探測目標的大小、材質及其平動速度,但是空間目標的空間運動除了軌道線速度以外,還會受到自身殘余角動量,以及重力梯度、光壓攝動等影響出現翻滾、旋轉等不受控運動。相比于空間目標較高的平動速度,不受控的翻滾、旋轉運動速率較低,現有的探測手段無法對其進行準確探測。但是對空間目標的不受控運動姿態的遠距離和精確測量,對于準確預測空間目標近地飛行軌道和墜地點都具有重要的意義,可以極大提升人類對包括空間碎片和小行星在內的空間目標對于地球本體危害的防御能力。
微多普勒探測技術是傳統多普勒探測技術的擴展,能夠在一定程度上反映目標所具有的與眾不同的運動特性。激光波長比微波波長短10~10個數量級,理論上空間分辨率比微波成像更高,是能夠在遠距離取得厘米量級分辨率的唯一光學成像觀察手段。因此,開展激光對空間目標的微動探測,能夠利用相比雷達探測更大的多普勒頻移,從而獲取到目標更加豐富的微動特征,有望實現對空間碎片的遠距離多維運動參數測量。
2 空間運動目標激光微多普勒探測原理
激光器發出一束波長為λ的激光E,該束激光經過光纖分束器分為兩束,能量較大的一束激光經過發射光學系統照射到空間目標表面,另外一束作為本振光用于和返回光束進行混頻外差。由于目標在進行自旋,導致目標后向散射回波信號e發生了微多普勒頻移。假設發射激光E的初始相位為0,則發射激光表達式如式 (1)所示,接收回波表達式如式 (2)所示:
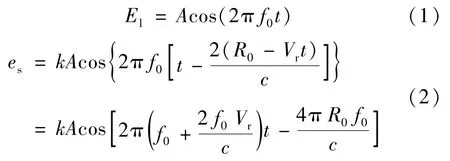
式中,A為發射激光強度;f為載頻,f=c/λ,c代表光速,λ為激光波長;k為回波強度系數,0≤k<1;R為激光雷達到目標質心的距離(m);V為目標微運動在激光雷達視線上的速度分量 (m/s)。
將回波信號簡記為式 (3)的形式:

令:

f為目標自旋產生的微多普勒頻率 (Hz)。
從光纖分束器出來的另一束激光經聲光調制器后作為本振光,見式 (5):

f為激光經聲光調制后的頻移,稱f為基頻,f=70MHz。
將式 (5)簡記為式 (6)的形式:

A為本振光的強度,A=A;f為本振光的頻率,f=f+f。
回波信號 (見式 (3))與本振光 (見式 (6))經光纖耦合器合束后在平衡光電探測器上進行差頻,平衡光電探測器響應差頻信號,生成的響應電流如式 (7)所示:

由式 (7)可知,微多普勒頻率f調制在了基頻f上,平衡光電探測器輸出的電脈沖信號經過數據采集卡在計算機進行后續的時頻特征提取和相對姿態參數提取。圖1為上述的激光微多普勒探測系統組成示意圖。
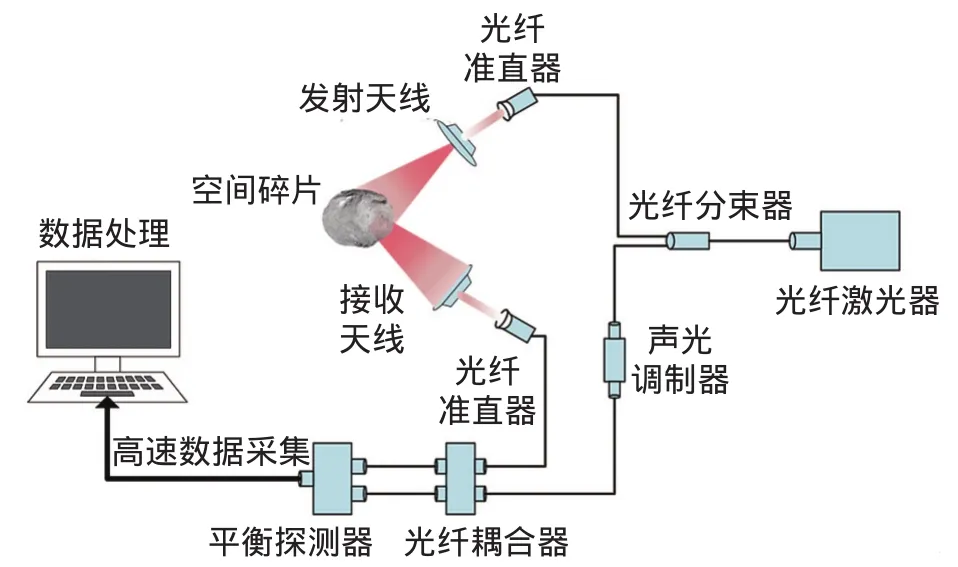
圖1 激光微多普勒探測原理圖Fig.1 Schematic diagram of laser micro-Doppler detection
光纖激光器的穩頻激光通過分束器將大部分能量通過準直器發射,照射到目標上,10mW的激光作為本振信號與接收回來的信號在平衡探測器中進行外差處理,獲得目標的距離信息、速度信息和微動信息。
3 基于微多普勒效應的激光探測技術進展
3.1 系統設計
實際實驗用的激光微多普勒探測裝置設計如圖2所示,采用激光和可見光及紅外共口徑探測,通過大視場紅外及可見光相機為激光雷達捕獲到目標后,通過快反鏡將激光指向目標進行微多普勒測量,探測目標的距離、速度、自旋及姿態信息。該系統在光學口徑200mm、平均功率200W的條件下,對10cm直徑的空間目標探測距離可到50km以上,對更大尺寸的空間目標具有更強的探測能力,通過提高接收口徑及激光發射功率也可以提高探測距離。
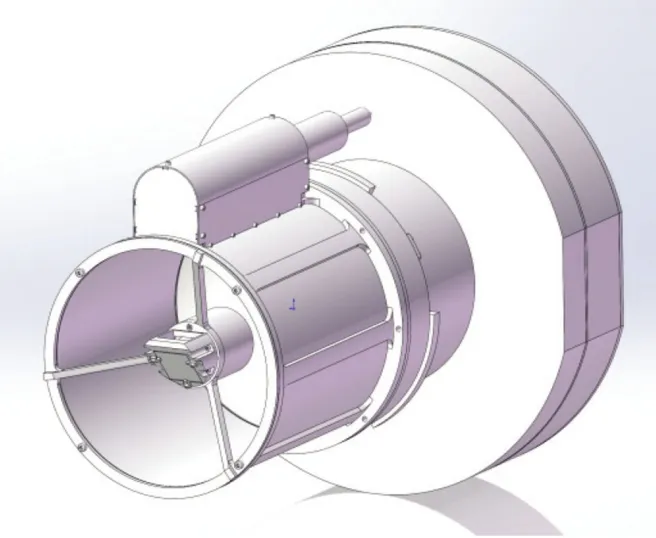
圖2 激光微多普勒探測裝置模型Fig.2 Model of laser micro-Doppler detection device
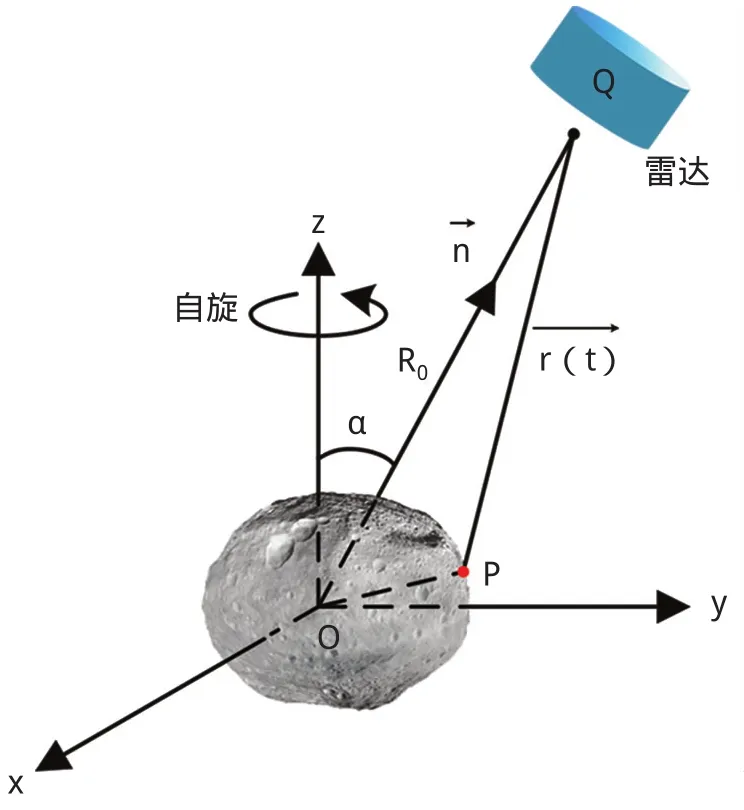
圖3 空間目標自旋運動微多普勒回波建模示意圖Fig.3 Schematic diagram of spin motion micro-Doppler echo modeling of space target
3.2 空間目標的微多普勒回波建模
對激光微多普勒回波信號而言,假設空間目標的主散射點為頂點p,初始時刻激光雷達與目標主散射點p的距離向量為r(0)=[x,y,z],t時刻激光雷達與散射點p的距離向量為r(t)=[x,y,z]。t時刻激光雷達與散射點p的距離向量r(t)由式 (8)給出:

式中,R為自旋變換矩陣,見式 (9)。
t時刻回波模型由式 (10)給出:

其中r(t)表示t時刻雷達與散射點p的“有效”距離,見式 (11):

微多普勒頻率f可由回波模型的相位求導得到,見式 (12):

由回波表達式 (10)可知,回波信號是余弦調制函數,余弦調制函數的頻率即為微多普勒頻率,余弦調制函數的振幅與散射點的散射強度有關。
對激光微多普勒回波信號而言:t時刻回波模型由式 (13)給出:
式中,r(t)為t時刻散射點k的“有效”距離,r(t)=n·r(t);r(t)為散射點k在t時刻的位置向量,r(t)=R(t)·r(0);r(0)為散射點k在初始時刻的位置向量;K為立方體表面總散射點個數;σ為散射面元k的回波強度系數。
回波信號的相位項由式 (14)給出:
微多普勒頻率由式 (15)給出:
注意:散射點k不是特指某個散射點,而是各個散射點的代稱。式 (15)的物理意義在于將目標表面各個任意散射點的有效回波進行疊加,即k個余弦調制函數疊加得到激光微多普勒回波信號。
4 仿真結果與分析
按照空間碎片直徑1m為典型目標進行激光微多普勒探測仿真,仿真條件如表1所示。
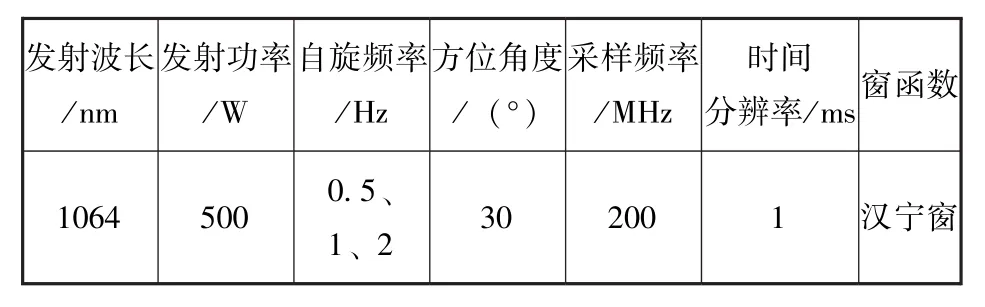
表1 直徑1m空間碎片仿真條件Table 1 Simulation conditions of space debris with a diameter of 1m
微多普勒回波信號是一種時變非平穩信號,本文應用一種經典的聯合時頻分析方法——短時傅里葉變換 (the short-time Fourier transform,STFT)來計算回波信號的短時傅里葉時頻譜,再對時頻譜進行二維傅里葉變換提取圖像的時間變化周期(或時間變化頻率)。
由于目標的時頻譜是各散射點時頻曲線的疊加,時頻特征的重復頻率與目標的自旋頻率存在一一對應的關系,且該信息為頻域信息,在時域上的隨機噪聲對頻域信息影響很小,因此利用這種方法可以非常準確地得到目標自旋頻率,進而可得到目標角速度數值。
當探測距離為50km,目標自旋頻率為2Hz時,時頻譜仿真結果如圖4(a)所示。由圖可知,圖像重復頻率為2Hz,換算可得目標自旋角速度為4π rad/s。當目標自旋頻率變化時,對應時頻譜頻帶寬度以及重復頻率將隨之改變,圖4(b)和圖4(c)分別是自旋頻率為1Hz和0.5Hz且探測距離為50km的結果,與圖4(a)類似,可分別得到圖像重復頻率為1Hz和0.5Hz,對應角速度分別為2π rad/s和π rad/s。
根據圖4可知相同探測距離情況下,目標自旋頻率越小,時頻譜頻帶寬度越小,重復頻率也越小,且計算結果與仿真設定值完全一致。
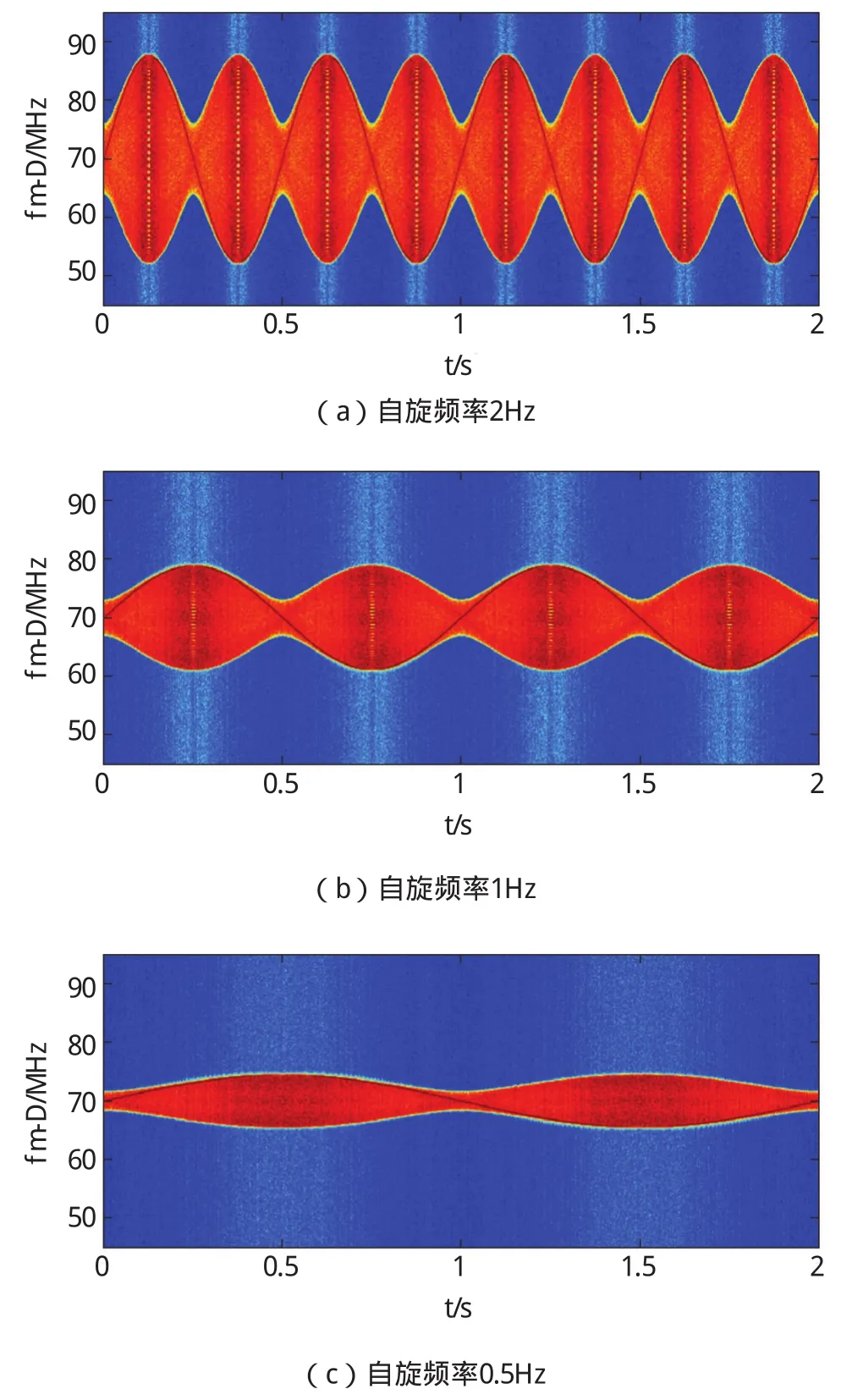
圖4 仿真時頻譜圖 (探測距離50km)Fig.4 Time-frequency spectrum simulation diagram(detection range 50km)
圖5是探測距離為500km時,自旋頻率分別為2Hz、1Hz和0.5Hz情況下的仿真結果;圖6是探測距離為1000km時,自旋頻率分別為2Hz、1Hz和0.5Hz情況下的仿真結果。
對比圖4、圖5和圖6可知,探測距離增加會導致回波信號信噪比降低,對時頻分析造成不利影響,但是仍能正確獲得目標自旋頻率參數值,亦可正確得到目標角速度數值。

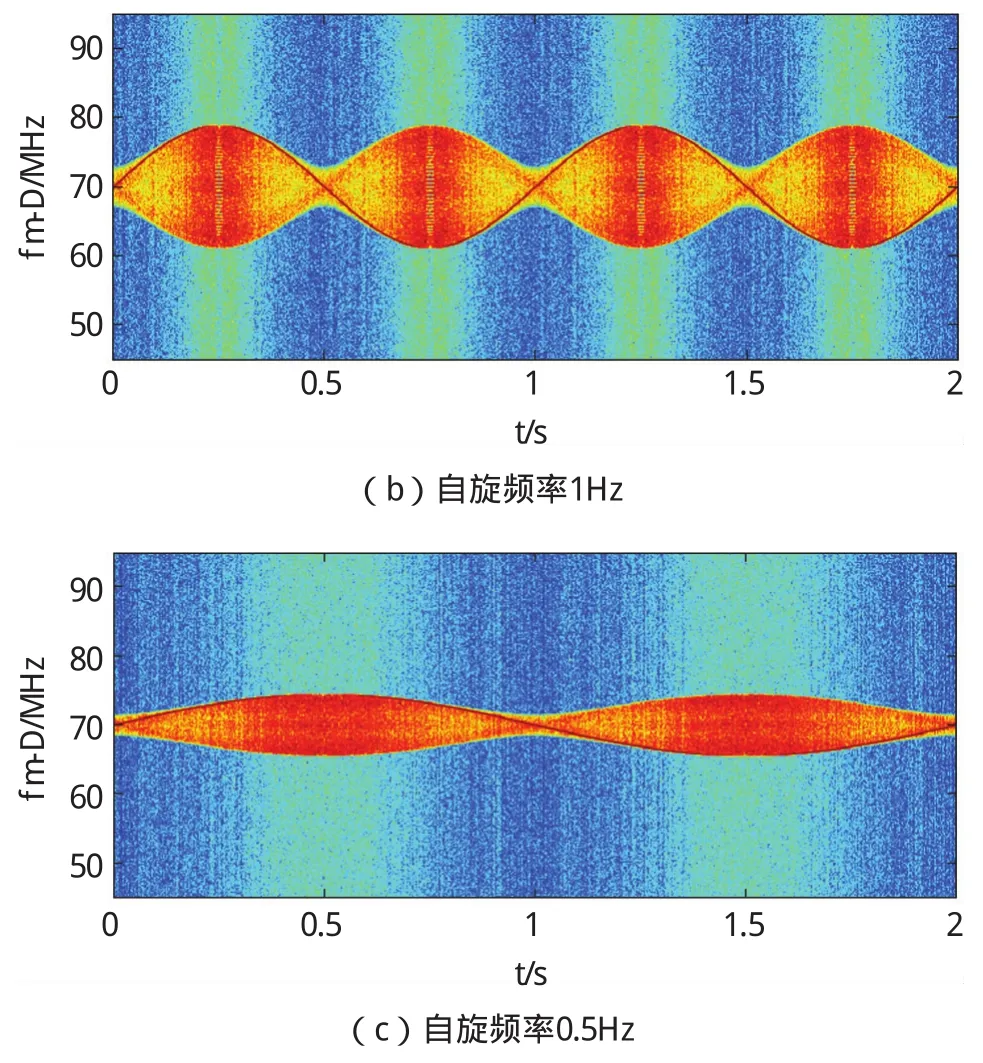
圖5 仿真時頻譜圖 (探測距離500km)Fig.5 Time-frequency spectrum simulation diagram(detection range 500km)
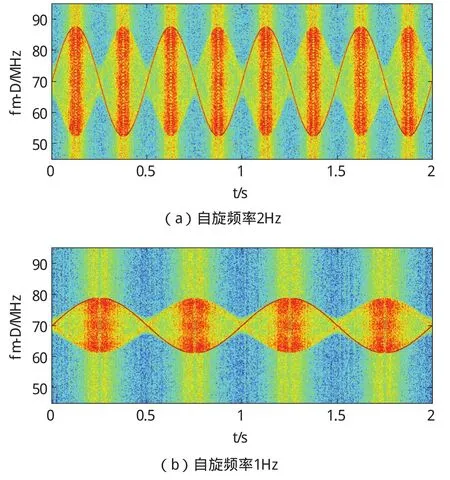

圖6 仿真時頻譜圖 (探測距離1000km)Fig.6 Time-frequency spectrum simulation diagram(detection range 1000km)
對于1m直徑的空間碎片仿真結果匯總在表2中,可見激光微多普勒探測對于直徑1m的空間碎片的探測距離在50km、500km以及1000km時,探測距離精度分別達到5m、10m和20m,角速度探測精度分別達到0.02rad/s、0.03rad/s和0.10rad/s,徑向速度探測精度分別達到0.5m/s、1m/s和5m/s。探測距離跟目標大小、激光發射功率等條件有關,一般而言,探測距離跟發射功率與目標大小成正比。探測距離越大,信噪比降低,探測精度會下降,實際設計時這兩個參數需要平衡。
對于尺寸從0.01~10m的空間碎片激光微多普勒探測仿真結果結果見表2,可見激光微多普勒探測可以實現對于直徑小于10m的空間碎片較遠的探測距離、較高的距離和速度分辨率,具備對空間碎片的在軌高精度觀測能力。
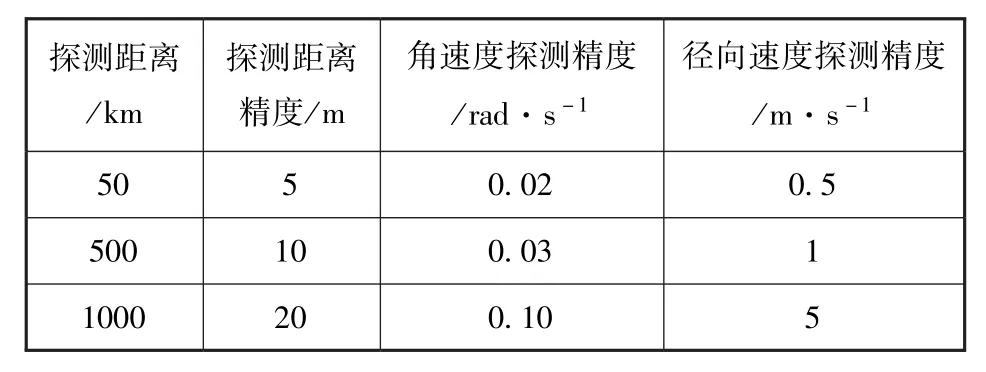
表2 直徑1m空間目標激光微多普勒探測仿真結果Table 2 Simulation results of laser micro-Doppler detection for space target with a diameter of 1m

表3 不同直徑空間碎片激光微多普勒探測精度仿真結果Table 3 Simulation results of laser micro-Doppler detection accuracy of space debris with different diameters
5 激光雷達天基裝備關鍵技術分析
激光雷達可通過搭載衛星實現在軌運行,通過設計合適的固定軌道或者實施變軌動作,可以實現對空間目標如近地小行星、空間碎片及其他空間目標的在軌監測,如圖7所示。由于空間環境不受大氣影響,激光沒有衰減和波前畸變,可以在1000km以上的較遠距離對空間目標進行精確探測和識別,探測目標的多維運動參數,判斷目標體積、大小以及材質,預測其運行軌道或者進入大氣層軌道,極大提高對空間目標的探測、管理和預警能力。為了實現在軌裝備,激光雷達系統還需要解決以下若干關鍵技術。
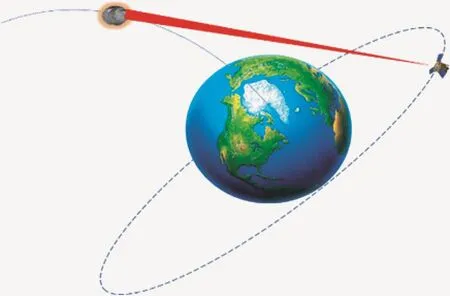
圖7 天基激光雷達探測空間目標示意圖Fig.7 Schematic diagram of space target detection by space-based LIDAR
(1)系統小型化技術
現在的原理樣機系統鏡頭口徑、長度和重量分別為200mm、400mm、10kg,考慮到對空間探測距離至少要1000km以上,再加上對探測分辨率的要求,在軌運行的系統出瞳孔徑至少要達到500mm,再加上和紅外、可見光相機復合,系統體積和重量相較目前的系統要增大很多。所以在光學設計上要盡可能采用共窗口和共光路技術,以盡可能減少光學元件的使用數量,減低系統的體積和重量。
(2)抗空間輻照加固技術
由于激光探測系統涉及激光器以及信號處理電路容易受到空間輻照的影響產生性能衰退和失效現象,激光雷達上天需要進行專門的器件及系統抗空間輻照加固,確保激光器和處理電路長期正常工作。這就需要從激光制造、電路設計與制造入手,做針對性的技術加固設計以及大量的地面驗證試驗,確保系統上天運行的可靠性。
(3)弱暗目標激光回波參數提取算法
利用激光微多普勒效應探測空間目標,距離向分辨率與脈沖寬度成正比,需要從探測回波中提取目標信息的有用回波,用于目標圖像重構。空間大氣環境相對純凈,大氣影響可以忽略不計。由于目標距離遠、回波弱、還需要考慮空間輻照對信號電子設備帶來的噪聲影響等因素,需要建立各種探測影響因素對回波信號的調制模型,研究相應的信號降噪和解調算法,用以恢復出包含在激光回波信號脈沖內部的目標反射調制量,實現對激光回波脈內目標調制信息的有效提取,提高探測精度。
(4)激光-紅外-可見多通道復合設計技術
激光微多普勒激光雷達的視場角目前只能做到0.2mrad,意味著目標識別空間范圍較小,只能在鎖定目標才能以后完成目標探測。需要和紅外和可見光相機系統進行復合,在大視場角光學相機完成目標搜索和跟蹤以后,利用共軸的激光雷達在進行激光微多普勒效應進行目標探測,這就需要解決多通道光學系統共口徑和共光路等技術問題。
6 總結與建議
利用激光微多普勒效應探測空間目標利用激光探測波長短、分辨率高的特點,可以實現對空間目標的徑向運動速度、翻轉和旋進角速度進行精確探測。本文通過對直徑0.01m、0.1m、5m和10m空間碎片進行建模及仿真計算,表明激光微多普勒效應可以實現對直徑10m以下的小尺寸空間碎片實現較遠的探測距離,較高的探測、距離速度分辨率和角速度分辨率。如果實現在軌裝備,激光微多普勒雷達還需要解決系統小型化、抗空間輻照加固技術、弱暗目標激光回波參數提取算法、激光-紅外-可見多通道復合設計技術等關鍵技術。未來隨著激光器技術發展,激光微多普勒雷達的探測距離和探測精度還可以繼續提高,完全具備在軌裝備條件,通過與其他空間目標觀測手段一起組網運行,可以提供包括空間碎片、小行星以及其他空間目標的精確多維運動和目標特征參數,提升國家對空間目標監測、預警以及管理能力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06