基于GF模型的BDS-3/GPS/Galileo三頻模糊度固定性能分析
2022-07-06 14:40:48吳明魁劉萬科羅小敏
大地測量與地球動力學 2022年7期
關鍵詞:模型
陳 楊 吳明魁,2 劉萬科 羅小敏
1 中國地質大學(武漢) 地理與信息工程學院,武漢市魯磨路388號,430074 2 東華理工大學江西省數字國土重點實驗室,南昌市廣蘭大道418號,330013 3 武漢大學測繪學院,武漢市珞喻路129號,430079
近年來,全球導航衛星系統(GNSS)發展迅速,GPS和GLONASS不斷推進現代化進程,Galileo加緊完成全球部署,我國北斗三號(BDS-3)衛星導航系統于2020-07-31正式提供全球服務。相較于單頻和雙頻觀測數據,三頻觀測數據可形成更多的長波長、低電離層和噪聲因子的線性組合觀測值,有利于模糊度的解算。在此背景下,國內外學者陸續開展了基于多頻組合觀測值的GNSS模糊度固定算法研究,Forssell等[1]和Vollath等[2]提出適用于三頻模糊度解算的TCAR(triple-frequency carrier ambiguity resolution)算法;Jung等[3]提出CIR(cascade integer resolution)算法,其本質與TCAR算法相同。隨后,諸多學者從線性組合的選取、三頻模糊度的固定方法等方面開展深入研究,提出諸多三頻模糊度解算的改進算法,并通過仿真數據和北斗二號(BDS-2)實測數據進行驗證[4-10]。
目前,基于GNSS三頻組合的模糊度解算方法雖然已經較為成熟,但多為理論研究,在實測數據驗證與性能評估方面又主要是基于BDS-2,尚缺少BDS-3、GPS、Galileo實測數據的驗證與分析。本文旨在基于實測數據分析BDS-3/GPS/Galileo無幾何(GF)模型的三頻模糊度固定效果,首先介紹BDS-3/GPS/Galileo的三頻高質量組合;然后介紹適合短基線TCAR算法的三頻組合;最后基于實測數據評估基于GF模型的BDS-3/GPS/Galileo三頻模糊度固定性能。
1 組合系數選取

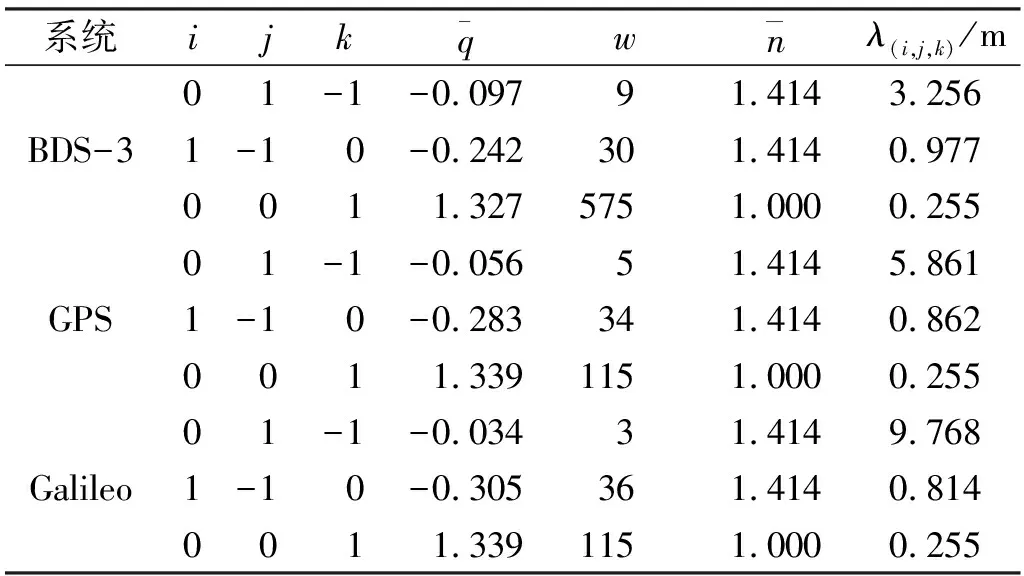
表1 短基線下BDS-3/GPS/Galileo高質量信號組合
2 無幾何模型解算模糊度


表2 TCAR算法中每一步固定模糊度時的誤差分析
由表2可知,BDS-3超寬巷、寬巷和窄巷模糊度的觀測噪聲影響相差不大,均在0.1周左右;GPS和Galileo超寬巷、窄巷觀測噪聲影響相差不大,但GPS寬巷觀測噪聲影響約為其窄巷的2倍,而Galileo寬巷觀測噪聲影響最為明顯,約為其窄巷的3倍。
3 實驗與結果分析
3.1 實驗數據
本文采用武漢市采集的3條不同長度的實測短基線數據評估基于GF模型的三頻模糊度固定效果,3條基線測站觀測環境開闊、無明顯遮擋,其基本信息如表3所示。其中,WHU1和WHU2測站的接收機類型均為Trimble Alloy,天線類型均為Trimble Zephyr Geodetic 2;WHU3測站的接收機類型為Trimble Alloy,天線類型為UniStrong UA91 3D;CUG1測站接收機類型為Septentrio PolaRx5S,天線類型為SEPCHOKE_B3E6;JFNG測站的接收機類型為Trimble Alloy,天線類型為TRM59800.00。

表3 基線基本信息
3.2 結果分析
采用5 m、3.6 km及13.1 km基線實測數據,基于GF模型分析BDS-3、GPS和Galileo的超寬巷、寬巷和窄巷模糊度固定性能。通過將TCAR算法計算得到的超寬巷、寬巷及窄巷模糊度浮點解與模糊度固定解真值作差,來評估BDS-3、GPS和Galileo模糊度浮點解的精度。其中,模糊度固定解真值的獲取方法為:固定基線向量坐標,采用幾何相關模型求解各頻率模糊度浮點解,并利用整數最小二乘降相關平差法固定,然后將各頻率模糊度固定解按照超寬巷和寬巷模糊度進行組合。在使用TCAR依次解算超寬巷、寬巷和窄巷模糊度時,若EWL/WL模糊度取整錯誤,必然會導致WL/NL模糊度的計算產生錯誤。因此,本文在計算和分析WL/NL模糊度誤差時,僅考慮EWL/WL模糊度能正確取整固定的歷元。
3.2.1 5 m基線
圖1為在5 m基線下BDS-3、GPS和Galileo的超寬巷、寬巷和窄巷模糊度誤差序列及分布直方圖,可以看出,BDS-3超寬巷、寬巷和窄巷模糊度誤差的波動范圍相當,絕大部分在-0.1~0.1周,且基本符合正態分布;GPS和Galileo超寬巷、窄巷模糊度的誤差分布范圍相當,基本在-0.1~0.1周,寬巷則較大。GPS寬巷模糊度誤差絕大部分在-0.2~0.2周,Galileo則在-0.4~0.4周;BDS-3、GPS和Galileo超寬巷模糊度的誤差標準差(STD)相近,約為0.02周;三者的窄巷模糊度誤差STD也相近,約為0.03周,而寬巷模糊度誤差STD存在較大差異。BDS-3寬巷模糊度誤差STD(0.038周)與其窄巷(0.034周)相當,而GPS和Galileo寬巷模糊度誤差STD(0.101周和0.190周)分別約為其窄巷(0.030周和0.042周)的3倍和4倍,與前文結論基本一致。

圖1 BDS-3、GPS和Galileo超寬巷、寬巷、窄巷模糊度誤差序列及分布Fig.1 Error series and distributions of EWL, WL and NL ambiguities for BDS-3, GPS and Galileo
超寬巷、寬巷和窄巷模糊度正確取整歷元占總歷元的百分比稱為超寬巷、寬巷和窄巷模糊度固定率[10]。表4(單位%)為5 m基線BDS-3、GPS和Galileo典型衛星對超寬巷、寬巷和窄巷模糊度的固定率,可以看出,BDS-3超寬巷、寬巷和窄巷模糊度的固定率可達99.9%以上,GPS和Galileo超寬巷模糊度固定率可達100%,而GPS寬巷、窄巷模糊度固定率優于98.8%,Galileo寬巷、窄巷模糊度固定率優于98.2%。E09-G11衛星對和E24-E25衛星對的模糊度固定率相對較低,這主要是因為觀測時段衛星高度角較低、數據質量較差。

表4 BDS-3/GPS/Galileo典型衛星對模糊度固定率
3.2.2 3.6 km基線
圖2為3.6 km基線BDS-3、GPS和Galileo的超寬巷、寬巷和窄巷模糊度誤差序列及分布直方圖,可以看出,BDS-3、GPS和Galileo超寬巷模糊度誤差的波動范圍相近,基本上在-0.1~0.1周,窄巷大部分誤差波動范圍為-0.2~0.2周,但寬巷波動范圍則較大。BDS-3寬巷模糊度誤差基本在-0.1~0.1周,GPS寬巷誤差絕大部分在-0.4~0.4周,Galileo則絕大部分在-0.5~0.5周。BDS-3、GPS和Galileo超寬巷模糊度誤差的STD分別為0.041周、0.030周、0.019周。由于基線較長,殘余誤差增大,BDS-3窄巷模糊度誤差的STD為0.097周,略大于其寬巷的0.061周;GPS和Galileo寬巷模糊度誤差STD(0.159周和0.223周)約為窄巷(0.088周和0.091周)的2倍。
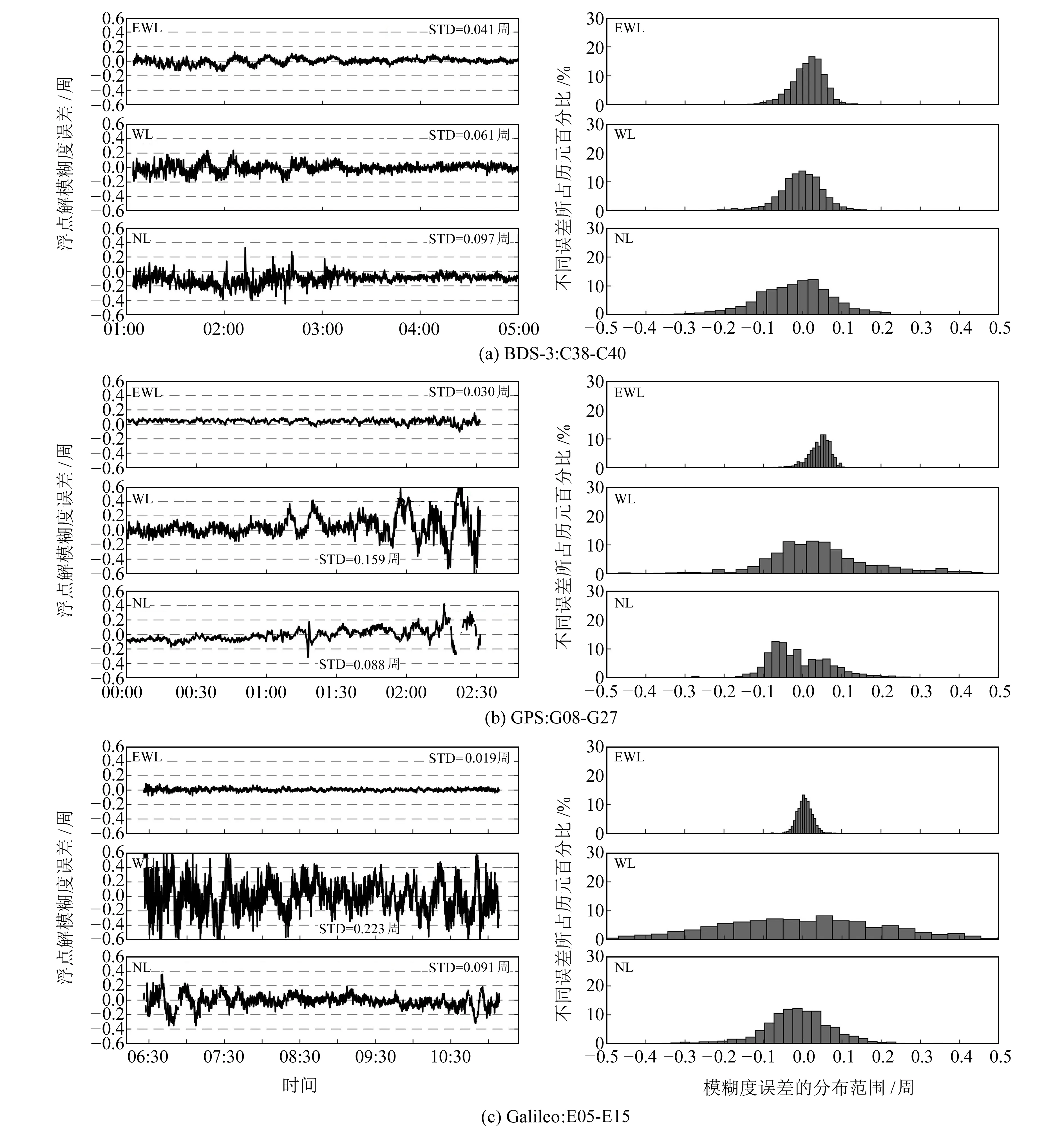
圖2 BDS-3、GPS和Galileo超寬巷、寬巷、窄巷模糊度誤差序列及分布Fig.2 Error series and distribution of EWL, WL, and NL ambiguities for BDS-3, GPS and Galileo
表5(單位%)為3.6 km基線BDS-3、GPS和Galileo典型衛星對的超寬巷、寬巷和窄巷模糊度固定率,可以看出,三者超寬巷模糊度固定率都可達100%。在寬巷模糊度固定率方面,BDS-3可達100%,GPS優于98.3%,Galileo優于96.5%;在窄巷模糊度固定率方面,BDS-3優于99.4%,GPS優于98.3%,Galileo優于96.5%。

表5 BDS-3/GPS/Galileo典型衛星對模糊度固定率
3.2.3 13.1 km基線
圖3為13.1 km基線BDS-3、GPS和Galileo的超寬巷、寬巷和窄巷模糊度誤差序列及分布直方圖,可以看出,隨著基線長度的增加,BDS-3、GPS、Galileo超寬巷、寬巷和窄巷模糊度誤差的STD均在增大。其中,三者超寬巷模糊度誤差STD增幅較小,仍小于0.1周,但寬巷和窄巷明顯增大;BDS-3窄巷模糊度誤差STD(0.176周)增加至寬巷(0.080周)的2倍,GPS和Galileo寬巷模糊度誤差STD(0.184周和0.245周)約為窄巷(0.126周和0.171周)的1.5倍。BDS-3超寬巷、寬巷模糊度誤差波動范圍在-0.2~0.2周,其窄巷基本在-0.4~0.4周。GPS超寬巷模糊度誤差大部分在-0.2~0.2周,Galileo則在-0.1~0.1周,兩者的寬巷模糊度誤差絕大部分在-0.5~0.5周,窄巷絕大部分則在-0.4~0.4周。
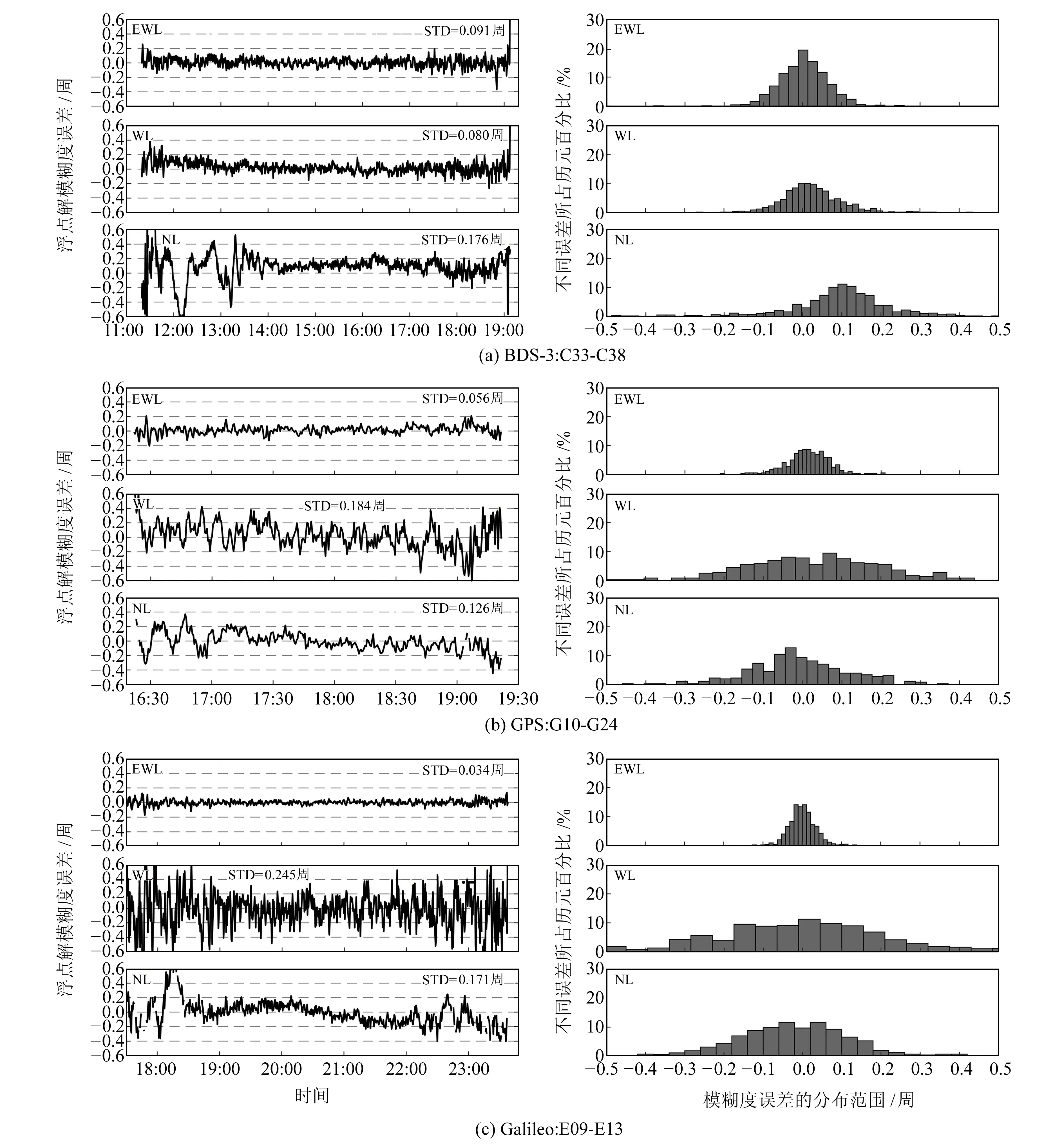
圖3 BDS-3、GPS和Galileo超寬巷、寬巷、窄巷模糊度誤差序列及分布Fig.3 Error series and distribution of EWL, WL, and NL ambiguities for BDS-3, GPS and Galileo
表6(單位%)為13.1 km基線BDS-3、GPS和Galileo典型衛星對的超寬巷、寬巷和窄巷模糊度固定率,可以看出,BDS-3超寬巷、寬巷模糊度固定率均優于99.7%,窄巷模糊度固定率優于92.2%;GPS和Galileo超寬巷模糊度固定率均為100%,寬巷模糊度固定率分別優于97.2%和93.0%,窄巷模糊度固定率分別優于91.8%和89.4%。E04-E12衛星對模糊度固定率相對較低,這是因為該觀測時段衛星高度角較低,多路徑誤差和觀測噪聲的影響較大。
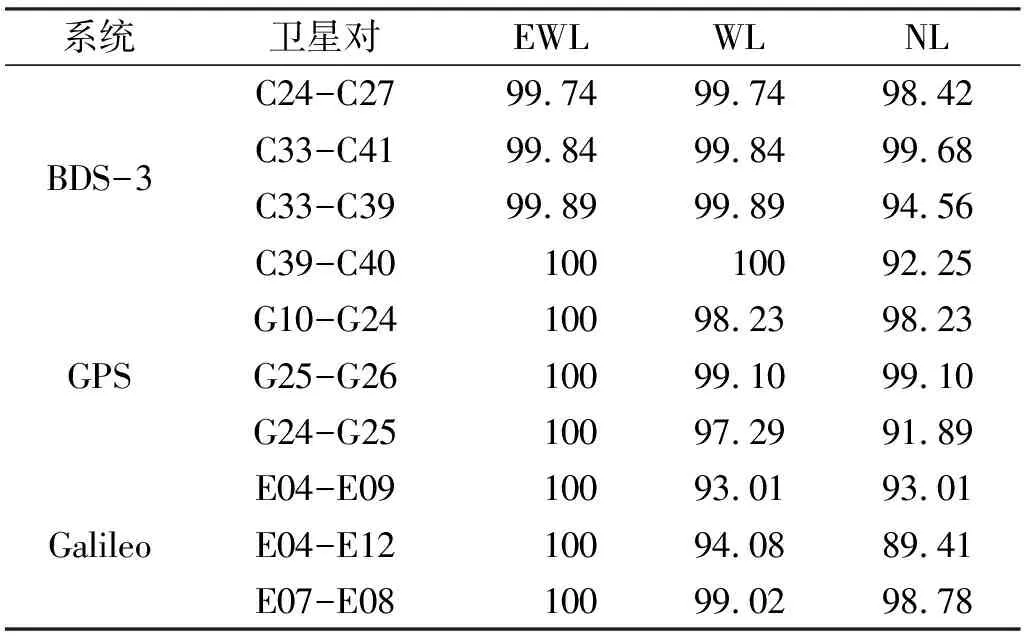
表6 BDS-3/GPS/Galileo典型衛星對模糊度固定率
4 結 語
本文給出適用于BDS-3/GPS/Galileo短基線TCAR模糊度解算的三頻組合,并基于短基線實測數據,評估基于GF模型的BDS-3/GPS/Galileo 超寬巷、寬巷和窄巷模糊度固定性能。結論如下:
1)在短基線情形下進行GF模型解算三頻模糊度,BDS-3/GPS/Galileo使用超寬巷組合(0,1,-1)、寬巷組合(1,-1,0)、窄巷組合(0,0,1),且求解超寬巷模糊度時偽距組合為(0,1,1)能達到較好的固定效果。
2)對于5 m和3.6 km基線,BDS-3、GPS、Galileo超寬巷模糊度固定率相當(99.9%以上),BDS-3和GPS寬巷、窄巷模糊度固定率(98.3%以上)略優于Galileo(94.8%以上)。隨著基線長度增加至13.1 km,BDS-3、GPS、Galileo超寬巷模糊度固定率略有下降,但總體基本相當;在寬巷模糊度固定率方面,BDS-3略優于GPS和Galileo;在窄巷模糊度固定率方面,BDS-3、GPS和Galileo相當(89.4%以上)。
3)隨著基線長度的增加,BDS-3、GPS、Galileo超寬巷、寬巷、窄巷的模糊度誤差波動范圍增大,STD值增大,且在窄巷表現明顯。BDS-3、GPS和Galileo超寬巷、寬巷模糊度誤差STD增幅較小,均在0.05周以內;窄巷模糊度誤差STD增幅則均在0.1周以內。
需要指出的是,目前BDS-3可用衛星數目較多,選取的典型衛星對的高度角較高,因此觀測數據質量較好;而GPS/Galileo可用衛星數目較少,選取的典型衛星對的高度角較低,觀測數據質量較差,這可能也是本文中BDS-3模糊度固定效果略優于GPS、Galileo的原因之一。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
