一種集裝箱起重機吊具零位補償方法*
2022-07-06 13:29:00劉春明張科昌生綠偉
港口裝卸 2022年3期
劉春明 張科昌 生綠偉
上海振華重工(集團)股份有限公司
1 引言
隨著集裝箱碼頭的吞吐量急劇增加,集裝箱運輸船舶的不斷增大,勞動力成本的不斷上升,以及環境保護理念的不斷增強,高效、智慧、綠色的自動化碼頭逐步成為港口發展的必然趨勢[1]。集裝箱碼頭的全自動化或半自動化改造已成為世界各港口和碼頭運營商的關注焦點,集裝箱起重機是港口運輸集裝箱的重要裝備,集裝箱起重機的自動化程度體現了港口智慧化智能化的水平[2]。
在集裝箱碼頭的自動運輸集裝箱環節中,起重機的自動化作業主要包括自動抓箱、自動運行和自動著箱[3-4]。在自動抓箱過程中,自動化控制器通過調整起重機的吊具,使吊具對準并貼緊集裝箱的上表面,然后將集裝箱提起。在自動運行過程中,自動化控制器通過移動起重機的小車和調整吊具鋼絲繩的長度來運送空吊具或帶載吊具,使其按照預定的軌跡運行。在自動放箱過程中,自動化控制器通過調整起重機的吊具,使吊具所帶的集裝箱對準并貼緊目標集裝箱箱位,然后將集裝箱放下。自動抓箱和放箱是難度較高的動作。
在集裝箱起重機的全自動化作業過程中,吊具通過鋼絲繩連接到起重機小車,因此具有單擺的搖擺特性,所以需要對起重機吊具的零位進行檢測。當起重機進行自動運行時,不需要精確的吊具零位,往往僅對吊具的零位進行粗略標定,標定方法一般采用固定小車位置,緩慢變動起升,建立吊具零位與小車位置和起升高度的關系表,通過查表的方法查找當前零位。當執行自動抓箱或自動著箱時,需要精確的吊具零位,而依據傳統標定方法的吊具真實零位與標定零位往往偏差過大,降低了抓箱或著箱的成功率和裝卸效率。提高吊具零位準確度的一個方法是增加標定的小車位置數量,即增加關系表的維數,但關系表越大,其維護也越復雜。因此,如何檢測吊具零位是起重機自動裝卸的關鍵技術之一。
在不計吊具偏載引起的吊具旋轉的情況下,由于吊具鋼絲繩的不同纏繞方式,使得吊具隨起升高度的不同,會在水平方向產生不同的平移現象。提出了一種基于鋼絲繩纏繞模型的吊具零位補償計算方法,該方法通過計算吊具在不同起升高度時對應的水平偏移值,給出補償量,消除其對水平偏移的影響。
2 吊具鋼絲繩卷繞方式
起重機吊具的自動抓箱、自動著箱和自動防搖運行都需要對吊具的零位進行檢測。然而,起重機的機械結構,如大車軌道傾斜、彎曲,起重機大梁形變,吊具鋼絲繩卷繞模式都會對吊具零位的檢測精度產生影響。鋼絲繩采用的混合纏繞方式使得吊具零位并不處在掛裝中心位置,需要對集裝箱起重機的吊具零位進行補償。港口岸邊集裝箱起重機吊具上架有4個動滑輪,分別與起重機小車上的4個定滑輪直接卷繞。通過改變鋼絲繩的長度,改變集裝箱起重機吊具的高度。
簡化后的集裝箱起重機小車-吊具模型見圖1。集裝箱起重機的吊具下架用來抓放集裝箱,吊具上架通過固定的動滑輪組及其卷繞的鋼絲繩與起重機小車相連接。集裝箱起重機的小車通過固定的定滑輪組及其卷繞的鋼絲繩與吊具上架相連接。
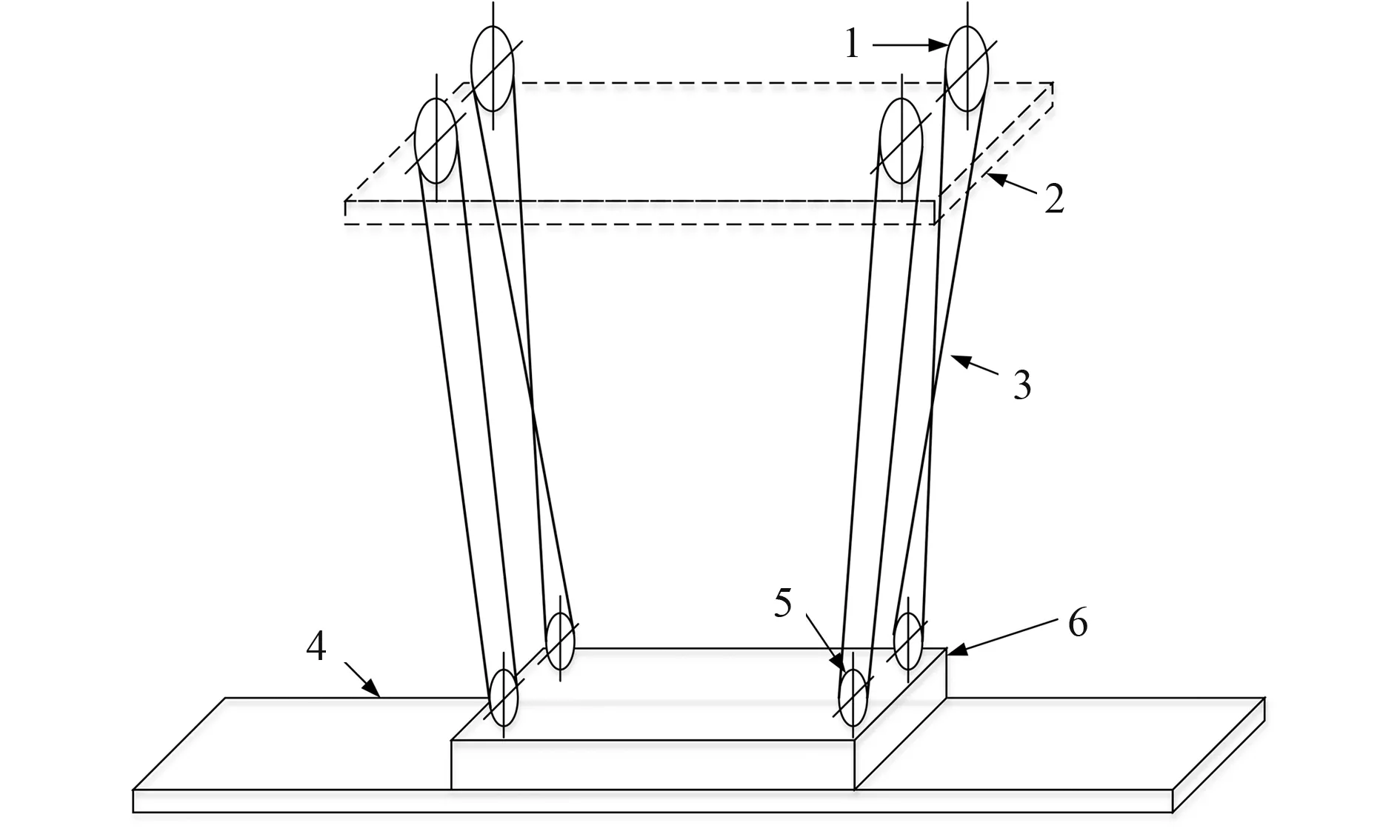
1.定滑輪 2.小車架 3.鋼絲繩 4.吊具下架 5.動滑輪6.吊具上架
從吊具的側面可以看出,鋼絲繩的卷繞方式主要有3種:平行卷繞、交叉卷繞和混合卷繞(見圖2)。由于平行卷繞和交叉卷繞都是左右對稱的關系,在不計吊具偏載引起的吊具旋轉的情況下,其吊具零位未發生變化。但是吊具鋼絲繩的混合卷繞方式,使得吊具隨起升高度的不同,在水平方向產生平移現象。
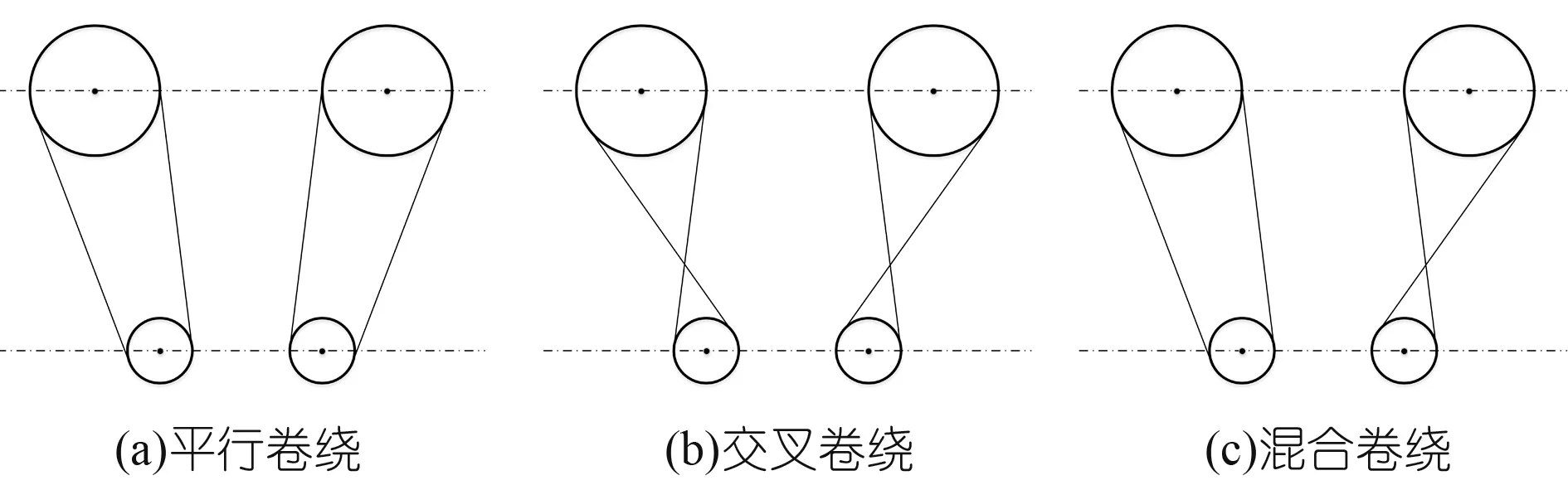
圖2 吊具鋼絲繩卷繞示意簡圖
3 吊具零位補償計算方法
鋼絲繩混合纏繞方式中,左側一組定滑輪和動滑輪采用了平行卷繞,右側一組定滑輪和動滑輪采用了交叉卷繞,只考慮小車和吊具同一側的2個定滑輪和動滑輪,得到吊具鋼絲繩混合卷繞計算模型(見圖3)。
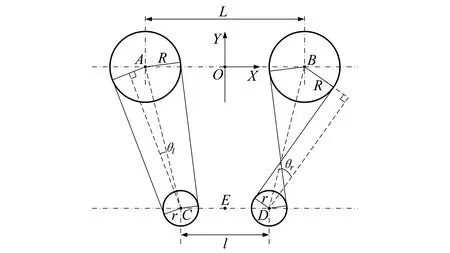
圖3 吊具鋼絲繩混合卷繞示意圖
小車架上的兩個定滑輪的半徑均為R,它們的中心點A和點B處在同一水平高度,其中心點為O,點A和點B之間的距離為L;吊具上架的兩個動滑輪的半徑均為r,它們的中心點C和點D處在同一水平高度,其中心點為E,點C和點D之間的距離為l。以點O為原點,點O指向點B為OX軸,垂直向上為OY軸,建立直角坐標系OXY。左側定滑輪與動滑輪的中心連線與切線之間的夾角為θl,右側定滑輪與動滑輪的中心連線與切線之間的夾角為θr。因此,點A和點B的坐標為:
(1)
點C和點D的坐標為:
(2)
線段AC和BD的長度分別為:
(3)
夾角θl和θr分別為:
(4)
左、右側滑輪組中的鋼絲繩總長度sl和sr分別為:
(5)
當吊具零位保持不變時,即在xE≡0的情況下,式(2)~(4)可簡化為式(6)~(8):
(6)
(7)
(8)
當滑輪之間的距離L和l,滑輪半徑R和r為常數時,利用公式(5)可以得到保持吊具零位時,左、右側滑輪組中的鋼絲繩總長度sl和sr,以及它們的偏差Δs=sr-sl。
然而,在吊具升降運動過程中,假設兩側纏繞的鋼絲繩總長度的差值Δs0保持不變,即有如下關系式:
sr-sl≡Δs0
(9)
將式(5)代入式(9)有:
R(θr-θl)+r(θr+θl)+|BD|cosθr
(10)
R(θr-θl)+r(θr+θl)
(11)
當滑輪之間的距離L和l,滑輪半徑R和r為常數時,由式(3)、(4)和(11)可以求得在任意高度yE處,鋼絲繩混合卷繞模型的吊具在水平方向上的零位xE,即零位補償量為:
xE=f(yE)
(12)

(13)
4 吊具零位補償仿真測試
在仿真實驗中,假設滑輪之間的距離L=5.0 m和l=1.2 m,滑輪半徑R=0.6 m和r=0.4 m,利用公式(5)~(8)可以計算吊具在yE處保持中間零位時,左、右側滑輪組中的鋼絲繩總長度sl和sr(見圖4),以及它們的偏差Δs=sr-sl(見圖5)。
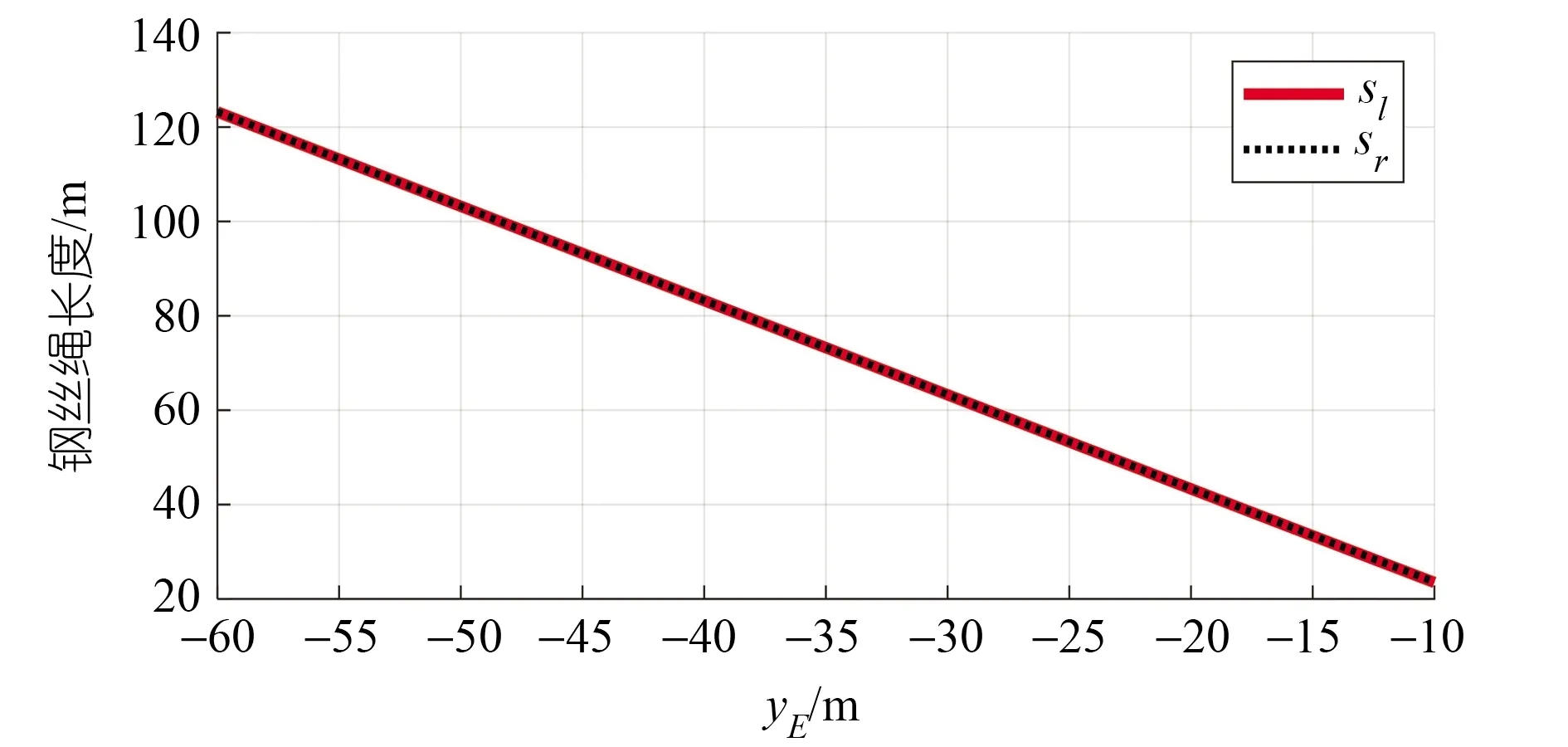
圖4 吊具保持中間零位的鋼絲繩總長度
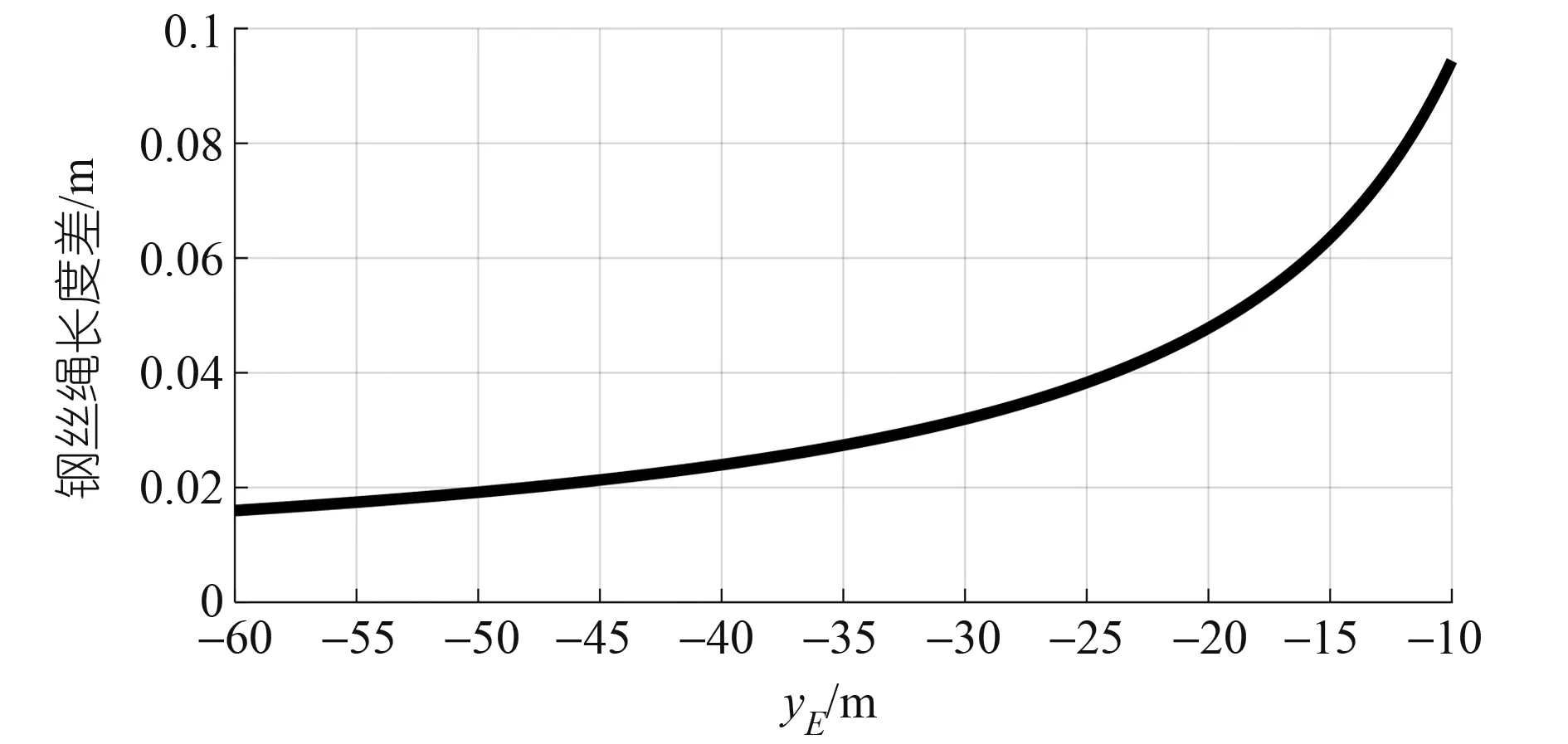
圖5 吊具保持中間零位的左右鋼絲繩總長度差
從圖4和圖5中結果可以看出,吊具在任意yE處保持中間零位時,左、右側滑輪組中的鋼絲繩總長度sl和sr隨吊具高度的增加幾乎呈線性減小,它們之間的長度差Δs隨吊具高度的增加而增大,并表現出了非線性特性。

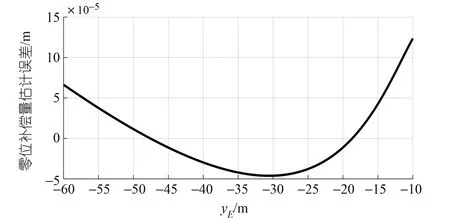
圖6 吊具在水平方向上的零位補償量的估計誤差
5 結語
集裝箱起重機在進行自動化作業時需要對吊具的零位進行檢測,在不計吊具偏載引起的吊具旋轉的情況下,提出了一種基于鋼絲繩纏繞模型的吊具零位補償計算方法,通過計算吊具在不同起升高度時對應的水平偏移值,給出補償量,消除水平偏移。仿真實驗結果表明,該方法滿足集裝箱碼頭實際作業中對吊具零位補償的需求。
