潮流能發(fā)電系統(tǒng)最大功率控制方法的研究
2022-07-06 14:50:06方志輝趙仕波
湖北電力 2022年3期
關(guān)鍵詞:系統(tǒng)
方志輝,林 珊,趙仕波
(1.國網(wǎng)岱山縣供電公司,浙江 舟山 316200;2.舟山建設(shè)技術(shù)學校,浙江 舟山 316200;3.岱山縣仕波電子經(jīng)營部,浙江 舟山 316200)
0 引言
石化能源日趨枯竭,價格不斷攀升、造成環(huán)境污染嚴重,世界各國把目光轉(zhuǎn)向綠色可再生能源,中國將提高國家自主貢獻力度,CO2排放力爭于2030 年前達到峰值,爭取在2060年前實現(xiàn)碳中和[1-2]。與風電、光伏等可再生新能源相比,潮流能運行規(guī)律性強、能量密度高、儲量龐大,有很好的開發(fā)利用價值。
美國、英國、意大利等國相繼研究出潮流能發(fā)電裝置[1,3]并進行實海況測試,已有部分潮流能電站投入商業(yè)化運行。我國自2010年設(shè)立海洋可再生能源專項資金,潮流能發(fā)電技術(shù)不斷發(fā)展與突破,哈爾濱電氣集團有限公司、中國海洋大學、哈爾濱工業(yè)大學等一批國內(nèi)企業(yè)和高校致力研究潮流能發(fā)電裝置[3-4]。王項南[3]對潮流能發(fā)電裝置測試與評價標準進行了研究。袁鵬[5]用數(shù)值模擬和模型水槽試驗潮流能水平軸水輪機的水動力學性能。陳立衛(wèi)[6]對潮流能永磁發(fā)電機進行有限元分析研究。很多學者對浙江舟山附近的潮流能進行分析和評估,吳亞楠[7]用FVCOM 數(shù)值模式對舟山普陀山-葫蘆島水道附近海域潮流場進行模擬計算,比較真實地反映該海域海水的運動規(guī)律,表明潮流能蘊藏量和可開發(fā)量相當可觀。2016 年7 月,世界首臺“3.4 MW LHD模塊化大型海洋潮流能發(fā)電機組”在舟山秀山島順利下海發(fā)電,并實現(xiàn)全天候連續(xù)發(fā)電并網(wǎng)運行。
關(guān)于潮流能發(fā)電系統(tǒng)最大功率點跟蹤控制的研究較少被報道。目前有些相關(guān)方案的可行性、調(diào)控規(guī)律及操作效果等并沒有獲得理論及試驗的驗證,他們的研究重點在于低速數(shù)字式變量泵,但光伏、風力發(fā)電系統(tǒng)最大功率跟蹤控制技術(shù)已很成熟[8-10]。借鑒比較成熟的風力、太陽能發(fā)電設(shè)計,分析潮流能發(fā)電系統(tǒng)最大功率跟蹤控制系統(tǒng),設(shè)計最佳控制策略,建立仿真模型,通過設(shè)置相關(guān)參數(shù),驗證其有效性。
1 潮流能發(fā)電系統(tǒng)基本原理與結(jié)構(gòu)
1.1 潮流能基礎(chǔ)知識[11-13]
海水流向一天改變2次,達到峰、谷值各1次,因此海水運動規(guī)律的周期T 取24 h,可用三角函數(shù)近似描述海水流速一天內(nèi)變化情況:

式(1)中,Vm為平均流速。為研究方便,設(shè)初相角為零。由流體力學知識得,潮流能與風能密度都正比于,
故水輪機從潮流能中轉(zhuǎn)化功率為:

式(2)中,β為水輪機功率轉(zhuǎn)化系數(shù);ρ為海水密度;S為水輪機迎流面積;Ω為機械角速度。不同潮流流速下,水輪機機械角速度-輸出功率特性曲線,見圖1所示。

圖1 不同流速下Pm-Ω曲線Fig.1 Pm-Ω curves at different flow rates
經(jīng)理論推導結(jié)合圖1,可得

同時可以得到處于最優(yōu)葉尖速比λopt(λ=ΩR/v為葉尖速比,即葉片尖端r=R處的切速度ΩR與流體速度v的比值)時,葉輪受到的最優(yōu)機械轉(zhuǎn)矩為:

在變速運行中,只要保持λ=λopt,就能達到最大功率。變速運行的MPPT控制手段是根據(jù)流體的實時流速,調(diào)節(jié)水輪機葉輪的轉(zhuǎn)速Ω始終保持在最優(yōu)葉尖速比λopt[14-17]。為了實現(xiàn)轉(zhuǎn)速Ω的調(diào)節(jié),只需要改變Boost 電路的占空比D,然后PMSG 輸出電壓有效值Um會產(chǎn)生變化,轉(zhuǎn)速Ω隨之變化,閉環(huán)控制流程為:D→Ud→Um→Ω→λ→Pm→D。
1.2 潮流能發(fā)電系統(tǒng)
圖2 為采用直驅(qū)永磁同步發(fā)電機(PMSG)的潮流能發(fā)電系統(tǒng)結(jié)構(gòu)示意圖,由水輪機、PMSG和變流器及控制器組成[3,5-6],具有結(jié)構(gòu)簡單、成本低、控制難度小、啟動性能好和較寬調(diào)速范圍的優(yōu)點。此外PMSG還具有體積小、發(fā)電效率高、可靠性高、運行噪聲低和對負載變化反應(yīng)快等特點。
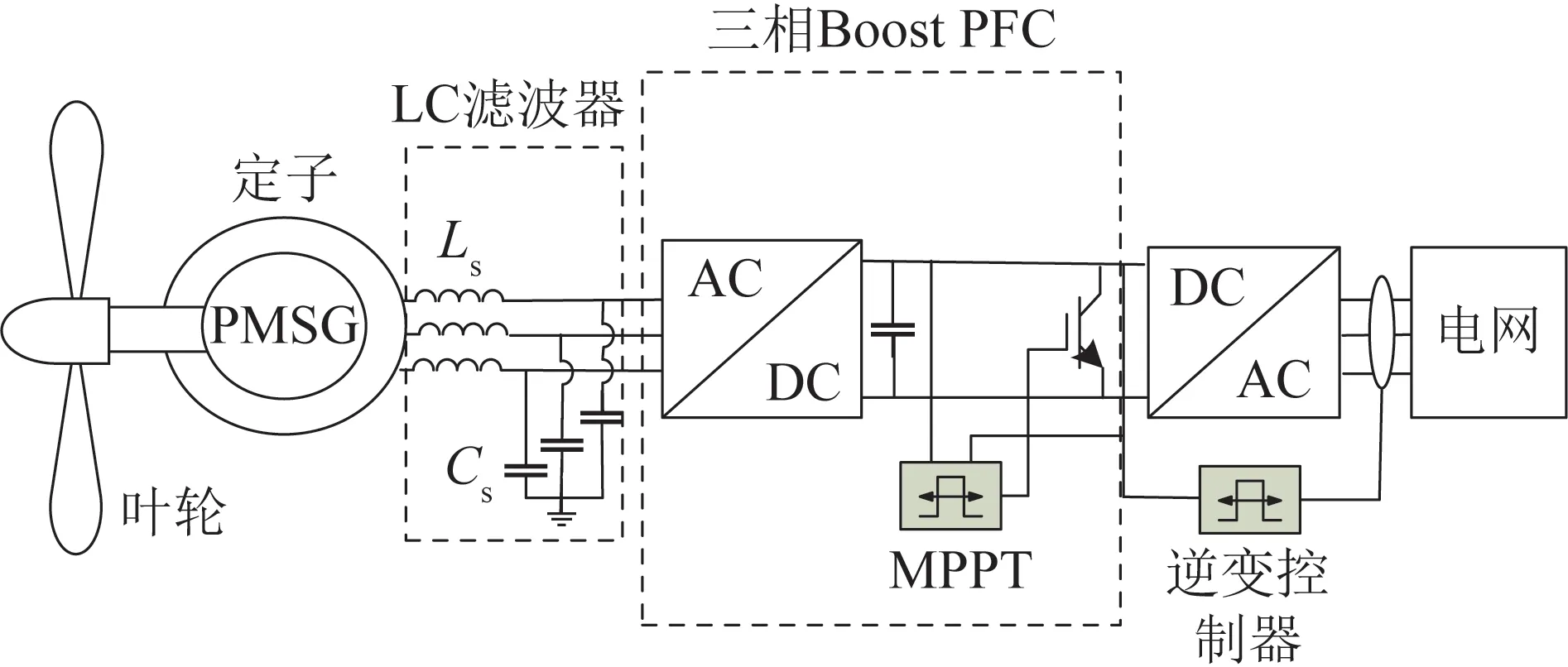
圖2 含PMSG的潮流能發(fā)電系統(tǒng)結(jié)構(gòu)圖Fig.2 Structure diagram of tidal current power generation system with PMSG
發(fā)電機輸出的是不穩(wěn)定三相交流電,電壓、頻率跟隨工況發(fā)生變化,首先進行三相橋式整流,再用三相Boost 型功率因數(shù)校正(PFC)電路變流,最后逆變?yōu)榫哂欣硐敕岛皖l率的交流電,并入電網(wǎng)。其中Boost 模塊的控制方法比普通Boost 升壓模塊不同點在于電感前置到交流側(cè),形成三相電感,不僅可以實現(xiàn)整流和穩(wěn)壓,還能改善交流側(cè)的功率因數(shù)的效果[18-24],見圖3。
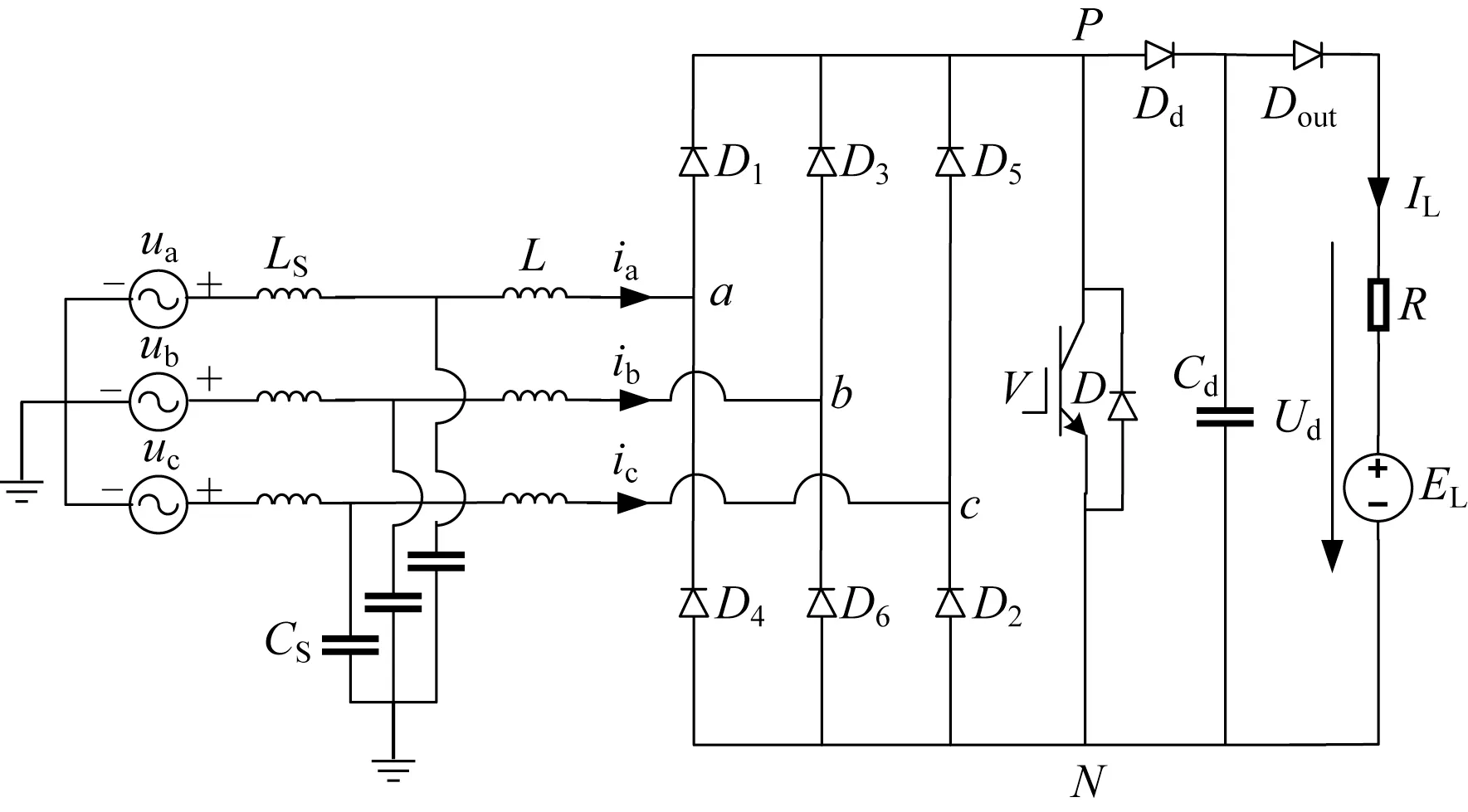
圖3 三相Boost型PFC結(jié)構(gòu)圖Fig.3 Three-phase Boost PFC structure diagram
2 最大功率控制方法
水輪機有變速和變槳兩種運行方式。變速運行指水輪機的輸出功率未達到其額定值,采用MPPT 控制使輸出始終保持在當前流速下的最大輸出;變槳運行指輸出已經(jīng)到達額定值,而流速還在增大,希望增大槳距角使其穩(wěn)定在額定輸出功率,如果超過切機流速,就快速停機[14-17]。
MPPT 控制方法常應(yīng)用于各種波動性強、隨機性大的新能源中,通過對某一運行參數(shù)的調(diào)控使發(fā)電系統(tǒng)能夠輸出最大功率,是運行參數(shù)的自我優(yōu)化過程。從原理上講MPPT 是一個阻抗匹配的過程,除負荷以外部分的內(nèi)電阻為R,從發(fā)電機看入可變負荷的電阻為RL,當RL=R時,負荷能得到最大功率。運行條件是在不斷變化的,即R在改變,MPPT 是通過控制手段改變從發(fā)電機看入的負荷電阻RL,使其與R進行匹配。
2.1 變步長PO算法設(shè)計
MPPT 有多種方法,常用的如最佳葉尖速比法(TSR)、功率信號反饋法(PSF)、最優(yōu)轉(zhuǎn)矩法(OTC)、擾動觀察法(PO)和最優(yōu)梯度法(OGC)等,通過對5 種常用的MPPT進行對比,總結(jié)見表1。
通過對比分析可知,TSR、PSF 和OTC 存在控制難度大或精確度低的問題,PO方法比較適合永磁同步發(fā)電機的變速發(fā)電系統(tǒng),但PO法的局限性可以通過步長|?Ω|和迭代周期?T的設(shè)置體現(xiàn)出來:
1)步長|?Ω|過大將引起極值點附近的振蕩,造成功率損耗,降低系統(tǒng)效率;
2)步長|?Ω|過小將引起收斂速度變慢,影響系統(tǒng)響應(yīng)特性;
3)迭代周期?T過大也影響系統(tǒng)的響應(yīng)特性,同時使結(jié)果不精確;
4)迭代周期?T過小將嚴重消耗內(nèi)存和計算速度,提高硬件成本。
OGC 的缺點是需提前知道Cp-λ曲線計算梯度數(shù)值,設(shè)計將梯度進行替代,改為不需要提前知道水輪機的特性就能計算出而且能夠反映Pm-Ω變化趨勢的參數(shù)。
1)分析利用占空比D 對PMSG 輸出功率進行控制。
PMSG 輸出的相電壓有效值為Um。Boost 升壓模塊輸出穩(wěn)定的直流電壓Uout給DC/AC 模塊。PMSG 輸出功率Pg=Pm-?Pm,機械功率損耗?Pm是定值。
三相Boost 型PFC 中的Boost 升壓模塊采用臨界DCM運行方式:

式(5)表明:D和Ω的關(guān)系是線性的,可通過對占空比D的控制替代對轉(zhuǎn)速Ω的控制,兩者的控制方向是相反的。采用PO方法判定向正向擾動|?Ω|,相應(yīng)應(yīng)該向負向擾動|?D|;判定向負向擾動|?Ω|,相應(yīng)應(yīng)該向正向擾動|?D|。
2)尋找替代梯度的變步長。
要求步長能反映曲線變化趨勢而計算不需要提前知道很多參數(shù)。考慮采用相鄰擾動點的連線斜率來替代步長,具體迭代公式為:

式(6)中,?Pgk=Pgk-Pg(k-1),?Dk=Dk-Dk-1,?Pmk=Pmk-Pm(k-1),?Ωk=Ωk-Ωk-1;h1,2為調(diào)節(jié)收斂系數(shù)。
為防止振蕩,當?Pmk=0時,取前一步的半步長:

3)迭代算法設(shè)計。根據(jù)式(6)和式(7)設(shè)計步驟如下:
①輸入初始的占空比D0=0.5,占空比上下限[Dmin,Dmax]=[0,1],水輪機的額定機械功率PmN和額定轉(zhuǎn)速ΩN,常數(shù)h2=0.05,準備迭代;
②設(shè)第k步的轉(zhuǎn)速和測得輸出功率分別為Ωk和Pmk,計算?Ωk、?Pmk;
③|?Pmk/PmN|>ε時,采用式(6)計算下一步占空比,|?Pmk/PmN|ε時采用式(7)計算占空比,特別有|?Dk|<ε時,保持Dk+1=Dk不變,提高計算速度。
④重復②、③步。
采用基于擾動觀察法和最優(yōu)梯度法相結(jié)合的改進變步長的PO 方法,收斂速度大大加快,并且通過步長的調(diào)整避免了振蕩的發(fā)生,同時這種方法不需要充分了解水輪機和PMSG的特性。
3 仿真分析
為驗證潮流能的可利用性及MPPT 方法的適用性,本文以位于舟山本島和秀山島之間具有復雜地形的灌門水道——岱山秀山潮流能為研究對象。王智峰曾對水道的8個位點的流速統(tǒng)計信息進行了連續(xù)26 h的觀測與分析統(tǒng)計,并估算可開發(fā)的潮流能功率[25-26]。因此,為簡化問題,鑒于水平軸潮流能水輪機組的單臺常見容量為50 kW,選用其中合適的位點搭建50×2 kW的潮流能發(fā)電站模型。
單個半徑為2 m 的葉輪額定機械功率為5 kW,所以50 kW 的發(fā)電機組,需要包含10 個葉輪,葉輪的實際模型非常復雜,采用Simulink 中自帶的編程模塊[27-35],模塊結(jié)構(gòu)見圖4。海水ρ取1 025 kg/m3,槳距角β取2.25,海水流速v取2 m/s,葉輪半徑R取1 m,機械角速度Ω從0 升至30 rad/s,當Ω取到15 rad/s,葉尖速比λ為7.5,Cp和Pm同時達到最大,分別為0.4 和5 kW,但Tm的極值點,約在Ω取到10 rad/s 左右達到最大。
按1.2 介紹的PMSG 直驅(qū)+三相Boost 型PFC 模型建立含潮流能發(fā)電系統(tǒng)仿真圖,見圖4所示。

圖4 潮流能發(fā)電系統(tǒng)仿真模型Fig.4 Simulation model of tidal current power generation system
計算Boost 模塊中的主要參數(shù),主要包括LC 濾波器參數(shù)Ls和Cs、激勵三相電感L和輸出濾波電容Cd,取抑制紋波率u%=0.1,計算如下:

在仿真中將MPPT分別設(shè)置為傳統(tǒng)擾動觀察法與改進變步長的擾動觀察法,并根據(jù)實際讀數(shù)進行不斷調(diào)整,最后選定Ls=1 mH,Cs=200 μF,L=5 μH,Cd=300 μF,其余參數(shù)設(shè)置在此略去,仿真結(jié)果如圖5-圖7所示。
圖5 可以看到兩種算法的Cp基本保持在最大值0.4 左右,而隨著流速的變化,機械功率呈三階梯狀,Pm1∶Pm2∶Pm3=37∶59∶47。采用傳統(tǒng)擾動觀察法的輸出電壓Uout波形和相應(yīng)的諧波畸變率THD%見圖6,變步長的擾動觀察法見圖7,對比圖6 和圖7 看到,后者輸出電壓的諧波畸變率更小,電壓更平穩(wěn),驗證所提的改進MPPT策略更有效。

圖5 流速變化時水輪機的利用系數(shù)和機械功率(左為PO,右為變步長PO)Fig.5 Utilization coefficient and mechanical power of hydraulic turbine with flow-rate variation (left is PO;right is variable step-length PO)
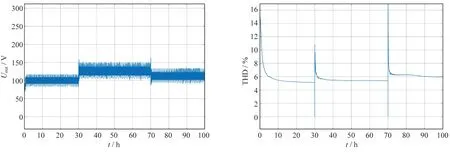
圖6 流速變化時系統(tǒng)的輸出電壓和諧波畸變率(傳統(tǒng)擾動觀察法)Fig.6 Output voltage and THD of the system with flow rate changing(traditional disturbance observation)

圖7 流速變化時系統(tǒng)的輸出電壓和諧波畸變率(變步長的擾動觀察法)Fig.7 Output voltage and THD of the system with the flow rate changing(variable step disturbance observation)
4 結(jié)語
潮流能直接接入海島電網(wǎng),能減少電能跨海傳輸造成的線損,實現(xiàn)就地功率補償,可提升供電可靠性。本文對潮流能發(fā)電系統(tǒng)的最大功率點跟蹤控制進行算法設(shè)計,用Simulink仿真驗證控制策略有效,同時表明三相Boost 型PFC 模塊在控制直流輸出端諧波以及改善交流輸入端功率因數(shù)上表現(xiàn)良好,對類似具有波動性的新能源開發(fā)具有一定的參考價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
