智能網聯汽車毫米波雷達在環測試研究*
2022-07-02 00:49:18邢星飛翟洪濤鄭英東張志強
汽車電器 2022年6期
邢星飛, 翟洪濤, 鄭英東, 張志強
(中汽研汽車檢驗中心(天津) 有限公司, 天津 300300)
近年來, 智能網聯技術已成為汽車行業研究重點和熱點, 同時互聯網企業等競相加入, 成為高新技術領域關注的焦點。 為推動智能網聯汽車發展進程, 研究相應測試技術、 評價體系的工作勢在必行。 智能網聯汽車集 “感知、決策、 控制、 執行” 功能于一體, 其中, 感知系統使車輛獲取外界環境交通信息, 而毫米波雷達又作為該系統的重要傳感器, 因此研究測試毫米波雷達的真實性、 準確性等變得尤為重要。
基于毫米波雷達的智能駕駛系統已得到各車企廣泛應用, 如自動緊急制動AEB、 自適應巡航控制ACC, 為車輛行駛提供安全保障。 硬件在環測試憑借成本低廉、 操作靈活等特點成為前期開發的重要一環, 其通過I/O口、 CAN線等實現與攝像頭、 毫米波雷達、 控制器等相連完成虛擬測試系統搭建, 可以在預先設定的場景中對智能網聯汽車控制算法進行測試。 目前有National Instruments (NI)、 DENSO、dSPACE等建立起了毫米波雷達在環仿真模擬器, 提供了很好的試驗工具手段與經驗借鑒。 然而當前研究更加關注于模擬目標數量、 距離方面, 針對目標物反射特性投入較少, 存在目標物RCS (Radar Cross Section雷達反射截面)常量化, 仿真結果與實際道路測試結果存在較大差異等局限。 因此毫米波雷達在環測試平臺需要進一步優化才能滿足未來智能網聯汽車測試要求。
基于此, 本文結合目標物反射特性搭建出毫米波雷達在環測試系統, 使用CarMaker軟件與dSPACE雷達目標模擬器等對車輛控制器性能進行測試, 并結合實車測試對本文建立的毫米波雷達虛擬在環測試平臺進行驗證。
1 目標物反射特性分析
1.1 雷達反射截面分析
RCS是度量目標在雷達波照射下所產生回波強度的一種物理量, 可以定量地表征目標對電磁波反射能力。 關于雷達接受天線方面, 通常假設存在一個等效的接受面積,該等效的接受面積乘以入射波功率密度便等于雷達接受功率。 因此, RCS是目標物針對接受天線 “等效接受面積”的擴展, 是雷達針對目標物一種假想等效面積。
雷達反射截面積可以用平方米來表示, 也可以用分貝平方米表示 (dBsm), 兩者之間的數學關系為:

考慮到目標物尺寸遠大于雷達波長, 目標物總的反射場可以由多個分散的強反射源疊加計算。 由于目標物表面反射的相位存在隨機變化的情況, 式 (1) 中的RCS值也將隨著入射角改變而動態變化, 甚至可能出現較小的入射角變化, 目標物的RCS值出現數量級的改變。 因此亟需建立起不同角度的目標物RCS, 盡量真實還原實車測試場景。
1.2 目標物RCS包絡圖
目標物RCS的動態變化、 外部空間環境等因素可引起雷達接受功率改變, 基于雷達接受功率與目標物RCS之間的數學關系, 建立起雷達接受功率變化模型, 其中雷達接受功率可表示為:

式中: P——傳播功率; R——目標物與雷達之間的相對距離; G——天線增益; λ——毫米波波長; σ——目標物的RCS。
當目標物對雷達發射的電磁波反射后, 該電磁波便攜帶了目標物的反射特性信息。
根據公式 (2), σ與接受功率P, 同雷達相對縱向距離R存在等式關系, 因此在實際的毫米波雷達目標模擬器仿真中, 是通過控制毫米波雷達目標模擬器的發射天線的功率來模擬目標物反射情況, 使得被測毫米波雷達傳感器探測到的接受功率與目標物的實際RCS值相符, 配合毫米波雷達目標模擬器的天線轉動進而實現在不同角度下RCS的實時動態更新。
為獲取目標物不同角度的RCS值, 本文選取76GHz真實雷達采集數據信息, 為硬件在環仿真測試提供支撐。 目標物靜止放置于測試場地, 測試車輛以10km/h速度從遠處逐漸靠近目標物, 定義測試車輛與目標物 “頭對頭” 時的角度為0°, 每30°順時針方向旋轉目標物的朝向, 測試方法如圖1所示。

圖1 目標物RCS測試方法
依據上述測試方法便可得到關于目標物不同角度的RCS數據斷點, 編輯設置虛擬目標物信息導入到CarMaker軟件, 便可構建出如圖2所示的行人、 車輛、 踏板式二輪車的RCS包絡圖。
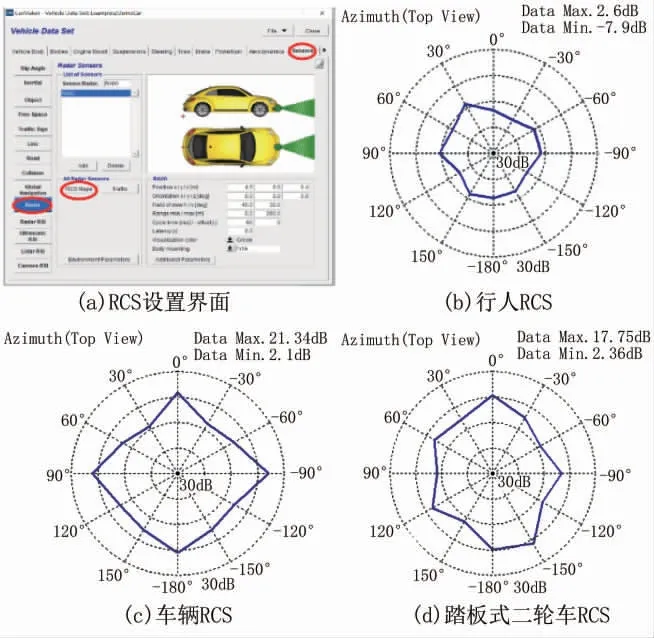
圖2 RCS設置界面及不同目標物RCS包絡圖
2 毫米波雷達在環測試系統
2.1 毫米波雷達在環虛擬測試系統
相比于軟件仿真, 該測試平臺基于Carmaker場景信息通過驅動天線電機改變發射角度, 利用雷達回波發生器(ARSG) 產生電磁波信號傳送給真實的雷達。 同時將控制器通過I/O口與dSPACE機柜相連, 編輯不同的測試用例,進而實現被測對象系統的、 全面的硬件在環仿真測試, 其測試原理如圖3所示。

圖3 毫米波雷達在環虛擬測試平臺
首先, 毫米波雷達安裝在暗室臺架上發射電磁波信號,部分信號被收發天線接收, 其余信號被暗室內的吸波材料吸收。 接收的信號降頻后被數據處理器分析, 通過對信號延時和多普勒頻移等, 生成包含目標物距離、 速度、 角度以及反映目標物特性RCS的信號, 同時驅動轉盤等執行機構, 來模擬發射真實的電磁波信號。 雷達接收到虛擬目標信息后, 通過CAN通信的方式傳遞給控制器, 控制器經過算法計算得出控制指令, 再通過CAN總線發回dSPACE實時機柜, 驅動虛擬車輛模型, 進而搭建出閉環的毫米波雷達在環測試系統。
2.2 毫米波雷達在環實車測試系統
實車測試系統由載有毫米波雷達的測試車輛、 陀螺儀RT3000及機器人控制器組成, RT3000可以獲得試驗車輛的位置、 速度、 偏航角等信息, 同時可以利用控制器計算出試驗車與目標物的相對距離、 速度等。 這套設備具有高精度、 低時延的特點, 經常用來驗證攝像、 雷達等傳感器和ACC、 AEB等控制器。
該實車測試系統原理為: 載有毫米波雷達的測試車輛按設定的測試用例行駛, 利用陀螺儀和控制器獲取本車與目標車輛的相對距離、 速度等數據信息, 并記錄AEB、ACC等功能觸發前后本車的速度、 減速度變化曲線等。 測試原理如圖4所示。
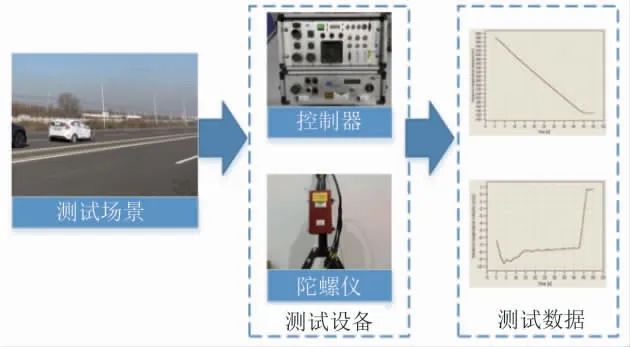
圖4 毫米波雷達在環實車測試原理
3 仿真與實車對比測試驗證
為驗證毫米波雷達虛擬在環測試平臺的可行性, 本文利用德國IPG公司開發的CarMaker軟件搭建仿真測試場景,利用dSPACE毫米波雷達目標模擬器來仿真目標物動態信息。 同時為了更好地對比驗證效果, 結合實車在相同的測試環境下進行比較, 來驗證虛擬測試平臺的可信性。
3.1 行人橫穿測試驗證
本文結合ADAS控制器的AEB、 ACC等功能展開測試,控制器和傳感器硬件均由國內某主機廠提供。 測試用例選擇CCRT (中國汽車消費者研究與評價規程) 中行人橫穿的場景, 如圖5所示。 試驗車輛設置車速為40km/h, 當試驗車輛與行人軌跡TTC為3.6s時, 行人以5km/h速度出發, 來驗證車輛的識別與響應能力。 記錄試驗車輛相對縱向距離、本車車速、 本車與行人相對速度變化情況, 并與實車測試結果進行對比驗證, 試驗驗證結果如圖6~圖8所示。
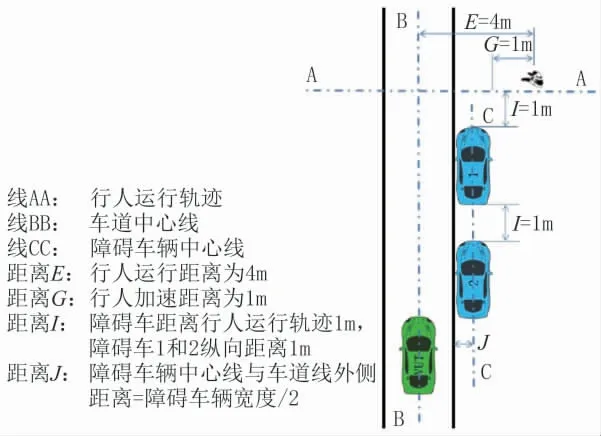
圖5 行人橫穿測試場景示意圖
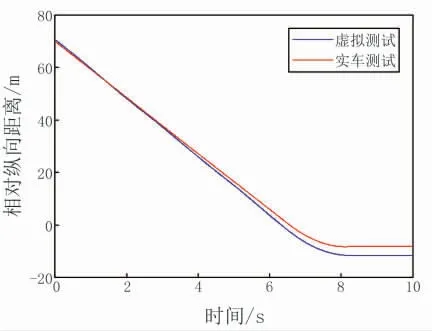
圖6 相對縱向距離變化曲線圖
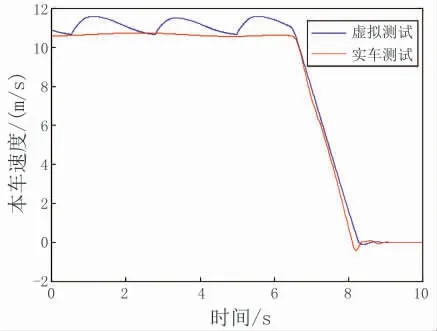
圖7 本車車速變化曲線圖
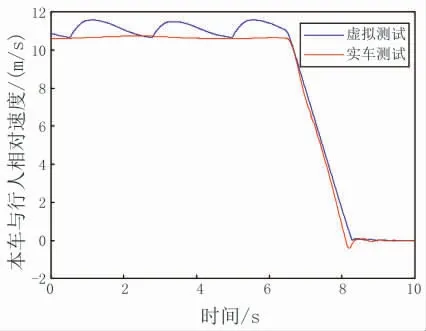
圖8 本車與行人相對速度變化曲線圖
根據測試結果, 在行人橫穿的場景下, 車輛AEB功能可正常作用, 表明車輛可識別目標物并減速制動, 虛擬測試可較好地反映實車測試結果, 但由于行人橫穿的突發性導致車輛未能提早制動。 根據相對縱向距離變化圖可知,車輛與行人發生了碰撞, 發生碰撞時虛擬測試的相對碰撞速度為10.4m/s, 發生碰撞時實車測試的相對碰撞速度為10.2m/s。 其中, 本車車速、 前車與行人的相對車速變化曲線在虛擬與實車測試中表現相對一致。
3.2 前方車輛慢行測試驗證
為驗證前方目標物為車輛時的測試效果, 試驗車輛以60km/h速度駛向20km/h慢行的目標車輛, 分別記錄試驗車輛相對縱向距離、 本車車速、 本車與前車相對速度變化情況, 并與實車測試結果進行對比驗證, 試驗驗證結果如圖9~圖11所示。
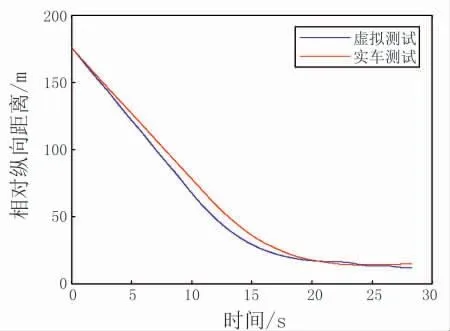
圖9 相對縱向距離變化曲線圖
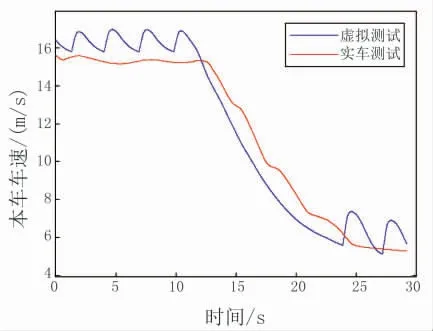
圖10 本車車速變化曲線圖
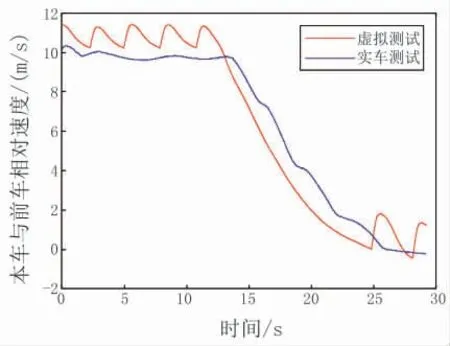
圖11 本車與前車相對速度變化曲線圖
根據測試結果, 在前車20km/h慢行后車60km/h跟隨情況下, 車輛ACC功能可正常開啟并作用, 虛擬測試可較好地反映實車測試結果。 其中, 達到穩定跟車時虛擬測試的相對縱向距離為12m, 實車測試為14m; 并且本車車速、 前車與本車的相對車速變化曲線在虛擬與實車測試中比較吻合。
3.3 前方二輪車慢行測試驗證
為驗證前方目標物為二輪車時的測試效果, 試驗車輛以80km/h速度駛向30km/h慢行的二輪車, 分別記錄試驗車輛相對縱向距離、 本車車速、 本車與目標二輪車相對速度變化情況, 并與實車測試結果進行對比驗證, 試驗驗證結果如圖12~圖14所示。
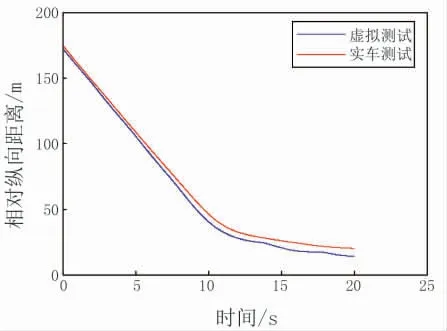
圖12 相對縱向距離變化曲線圖
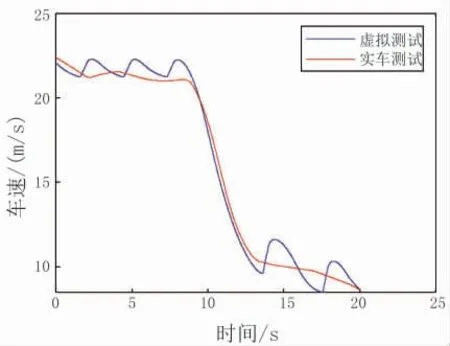
圖13 本車車速變化曲線圖
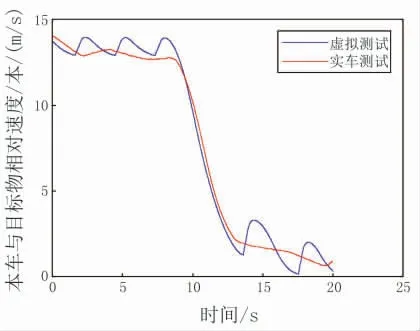
圖14 本車與二輪車相對速度變化曲線圖
根據測試結果, 在二輪車30km/h慢行后車60km/h跟隨情況下, 車輛ACC功能可正常作用, 表明車輛可識別目標物并減速跟車, 虛擬測試可較好地反映實車測試結果。 其中, 達到穩定跟車時虛擬測試的相對縱向距離為16m, 實車測試為18.9m; 并且本車車速、 前車與目標物的相對車速變化曲線在虛擬與實車測試中相對吻合, 驗證了該虛擬測試平臺具有可行性。
4 結論
本文首先分析毫米波雷達目標反射特性, 繪制出了不同類型目標物不同角度下的RCS包絡圖。 同時聯合CarMaker、dSPACE搭建了毫米波雷達在環測試平臺, 聯合陀螺儀、 控制器等搭建了實車測試平臺, 并結合CCRT評價規程中的測試用例針對ADAS控制器進行對比測試。 試驗結果表明, 虛擬測試平臺的車輛動態響應 (與目標物的相對縱向距離、本車車速、 相對速度變化等) 可很好地反映實車測試結果,驗證了該虛擬測試平臺具有可行性。
