平飛斜側視雙基雷達運動誤差分析
2022-07-01 08:02:18林蘭瑾何子述
雷達科學與技術 2022年3期
林蘭瑾, 何子述
(電子科技大學信息與通信工程學院, 四川成都 611731)
0 引言
雙基雷達是指發射機和接收機安裝在不同運動平臺上的系統。它具有靈活的配置方式和成像模式(如平飛正側視、平飛斜側視等),可以充分利用目標的散射特性來獲取更多有用的信息。相比于傳統的單基雷達,雙基雷達更具有技術上的優點:1) 發射站可以遠離被測地域,發射站生存能力得以提高;2) 接收站無源工作,敵方難以偵測,針對發射站的干擾,并不能影響接收站工作,因此這種體制具有良好的反偵察、抗干擾、抗截獲能力;3)接收站不含高功率發射機,體積、重量大幅度減小,可以安裝在RCS較小的無人機平臺上,從而使接收站生存能力進一步提高。
在雙基雷達系統中,由于收、發分離的特殊性,成像通常要求收發平臺具有較好的運動狀態,理想情況下為勻速直線運動狀態。但是,在實際情況中,發射平臺和接收平臺受到大氣環境中氣流擾動、導航控制系統誤差、機械以及執行任務等各方面不可預知因素的影響,不可能保持理想的勻速直線運動狀態,其飛行軌跡會因為運動誤差而發生變化,使得回波信號即使在矯正距離走動以后,時延走動誤差和多普勒相位誤差依然存在,造成多普勒相位移位和能量無法有效的積累,影響目標檢測和成像。
雙基雷達運動誤差的來源很多,如飛行姿態的變化、雷達平臺位置的改變或速度變化。飛行姿態的改變主要造成天線波束指向發生變化,可能造成雙基雷達無法接收回波等影響。但是姿態誤差不改變雷達平臺的飛行軌跡,無法對回波距離歷史產生影響。而雷達平臺坐標誤差會導致多普勒相位呈現二維空變特性,且走動矯正后的時延走動誤差也不能忽略。速度誤差的變化主要體現在大小和方向兩個方面。在以往的研究中,也有不少學者做過討論和分析。文獻[9]在平飛正側視模式下對速度誤差進行了研究,但它僅分析了速度誤差沿理想航線方向對成像的影響。文獻[10]基于平飛正側視模型,沿著3個方位(理想航線方向、俯仰方向、偏航方向)對速度誤差進行了研究,但它只是定性地分析了速度誤差對多普勒相位的影響。
基于以上的討論,為了得到一般性結論,本文基于平飛斜側視模型對速度誤差進行了定量研究。考慮到收、發平臺實際的飛行狀態,將速度誤差沿著3個方位進行了分解,即理想航線方向、俯仰方向和偏航方向。首先根據平臺運動模型,分別給出了收發平臺沿著理想航線方向、俯仰方向和偏航方向存在誤差時的等效距離歷史顯性表達式;然后考慮速度誤差給回波帶來的兩方面影響,即時延走動誤差與多普勒相位誤差,進而推導出了速度誤差限定范圍的解析表達式;最后通過仿真分析說明了速度誤差對多普勒相位和信號能量積累的影響,為工程設計和實現奠定了理論基礎。
1 雙基雷達信號模型



(1)


(2)
則目標點的雙基距離歷史為



(3)
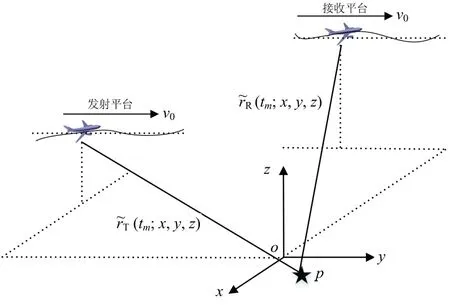
圖1 機載雙基雷達幾何結構示意圖
假設機載雙基雷達發射信號為線性調頻信號,根據雙基距離歷史和,脈壓后接收信號的表達式為

(4)
式中,為發射信號帶寬,為脈壓后的散射系數,為波長,包含了距離向快時間。
從式(4)可以看出,目標信號的回波包絡位置隨著慢時間而變化。當變化量超過距離分辨率時,將會產生距離走動,即積累時間內目標信號能量將分布在不同的距離單元內。此外,回波信號的相位是關于慢時間的二階函數,會導致多普勒擴散。距離走動和多普勒擴散將會使得信號能量無法有效的積累,不利于后期的目標檢測,因此在信號處理前矯正距離走動和消除多普勒頻率擴散是非常重要的。
然而,在實際情況中,發射平臺和接收平臺不可能保持理想的勻速直線運動狀態,其飛行軌跡會因為運動誤差而發生變化,從而導致真實的距離歷史和產生誤差。假設距離歷史運動誤差為Δ(;,,),則存在運動誤差時的回波信號可以表示為


(5)
2 速度誤差分析
考慮到載機實際的飛行狀態,將速度誤差沿著理想航線方向、俯仰方向和偏航方向進行分解,分別討論3個方位上速度誤差對信號的影響。
2.1 理想航線方向速度誤差分析
理想航線方向上速度誤差幾何結構示意圖如圖2所示。我們定義ΔT和ΔR分別為發射平臺和接收平臺在理想航線上的速度誤差,那發射站和接收站在理想航線上的速度誤差運動方程可以表示為
T()=(+ΔT)
(6)
R()=(+ΔR)
(7)
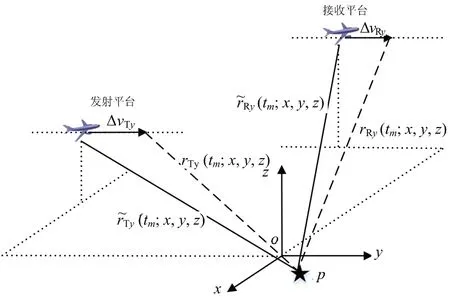
圖2 理想航線方向速度誤差幾何結構示意圖
將速度誤差代入式(3),則目標至收發站的距離歷史和為
(;,,)=


(8)




(9)
則距離歷史和誤差為


(10)
由于|ΔT|=,|ΔR|=,實際上|ΔT|和|ΔR|近似為0,因此,式(10)可以化簡為

(11)
根據距離歷史和誤差,那么多普勒相位誤差為

(12)

(13)


(14)
則理想航線方向上,速度誤差的限定范圍為Δ=min(Δ,Δ)。
2.2 俯仰方向速度誤差分析
俯仰方向上的速度誤差幾何結構如圖3所示。我們定義ΔT和ΔR分別為發射平臺和接收平臺在俯仰方向上的速度誤差,那發射站和接收站在俯仰方向上的速度誤差運動方程可以表示為
T()=ΔT
(15)
R()=ΔR
(16)
圖3 俯仰方向速度誤差幾何結構示意圖
將速度誤差代入式(3),則目標至收發站的距離歷史和為
(;,,)=


(17)
對上式按泰勒級數展開,可以得到





(18)
則距離歷史和誤差為


(19)
從上節分析,|ΔT|≈0,|ΔR|≈0,因此,式(19)可以化簡為
(20)
根據距離歷史和誤差,那么多普勒相位誤差為
(21)
取Δ=max(ΔT,ΔR),當時延走動誤差不超過一個距離分辨單元時,距離維速度誤差需要滿足的限制條件:
(22)


(23)
則俯仰方向上,速度誤差的限定范圍為Δ=min(Δ,Δ)。
2.3 偏航方向速度誤差分析
偏航方向上的速度誤差幾何結構示意圖如圖 4所示。我們定義ΔT和ΔR分別為發射平臺和接收平臺在偏航方向上的速度誤差,那發射站和接收站在偏航方向上的速度誤差運動方程可以表示為
T()=ΔT
(24)
R()=ΔR
(25)
圖4 偏航方向速度誤差幾何結構示意圖
將速度誤差代入式(3),則目標至收發站的距離歷史和為
(;,,)=


(26)
對上式按泰勒級數展開,可以得到





(27)
則距離歷史和誤差為
Δ(;,,)=


(28)
由于|ΔT|≈0,|ΔR|≈0,因此,式(28)可以化簡為
Δ(;,,)≈


(29)
根據距離歷史和誤差,那么多普勒相位誤差為

(30)
取Δ=max(ΔT,ΔR), 時延走動誤差不超過一個距離分辨單元時,距離維速度誤差的限制條件需要滿足:
(31)

(32)
則偏航方向上,速度誤差的限定范圍為Δ=min(Δ,Δ)。
通過對速度誤差沿著3個方位進行了定量的分析,可以得出以下的結論:1)速度誤差的限定范圍是與收發站位置坐標、目標位置坐標和平臺運動速度相關的;2)積累時間越長,速度誤差的容忍度越低;3)對比兩個條件下所導出的速度誤差限制范圍,可以看出多普勒相位誤差所導出的速度誤差限制條件比時延走動誤差所導出的速度誤差限制條件更苛刻。
值得注意的是,上文所推導的3個方位的速度誤差限制條件是比較嚴格的。實際上,有時發射站和接收站運動誤差的速度差會抵消一部分最大運動誤差帶來的影響,反而使得雙站的誤差和比單站的誤差要小一點,但即使誤差值有所減小,其對時延走動和多普勒相位的影響依然存在。
3 仿 真
本節將通過仿真來驗證所得結論。雷達參數和目標參數設置如表1所示。

表1 雷達系統參數
將表1雷達系統參數的設置參數帶入上節所推導出的速度誤差限制條件,可以分別得出速度誤差沿著3個方位的限定范圍,如表 2所示。從表 2速度誤差限定范圍的數據可以看出,時延對速度誤差的容忍度更高,而多普勒相位對速度誤差的限制條件更苛刻;相比于理想航線方向和偏航方向,速度誤差對俯仰方向的回波信號影響更大,速度誤差的限制條件更苛刻。
表2 速度誤差限定范圍
根據表2速度誤差限定范圍給定的速度誤差的限定范圍,通過兩組典型參數下的數值仿真,分析了速度誤差對時延走動誤差和多普勒相位誤差的影響。兩組速度誤差的設置參數如表 3所示。
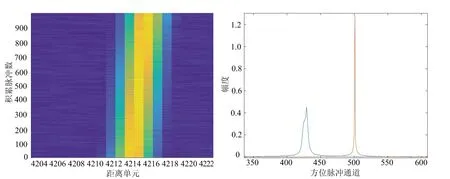
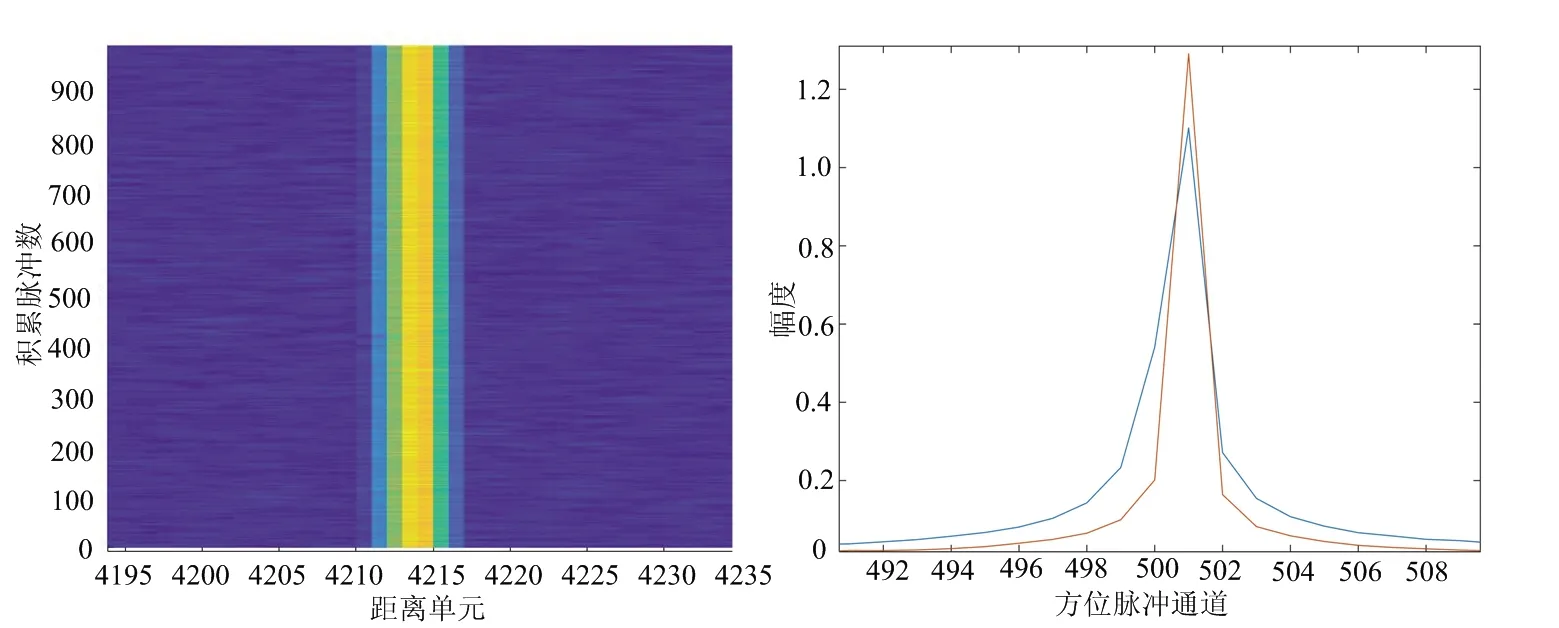
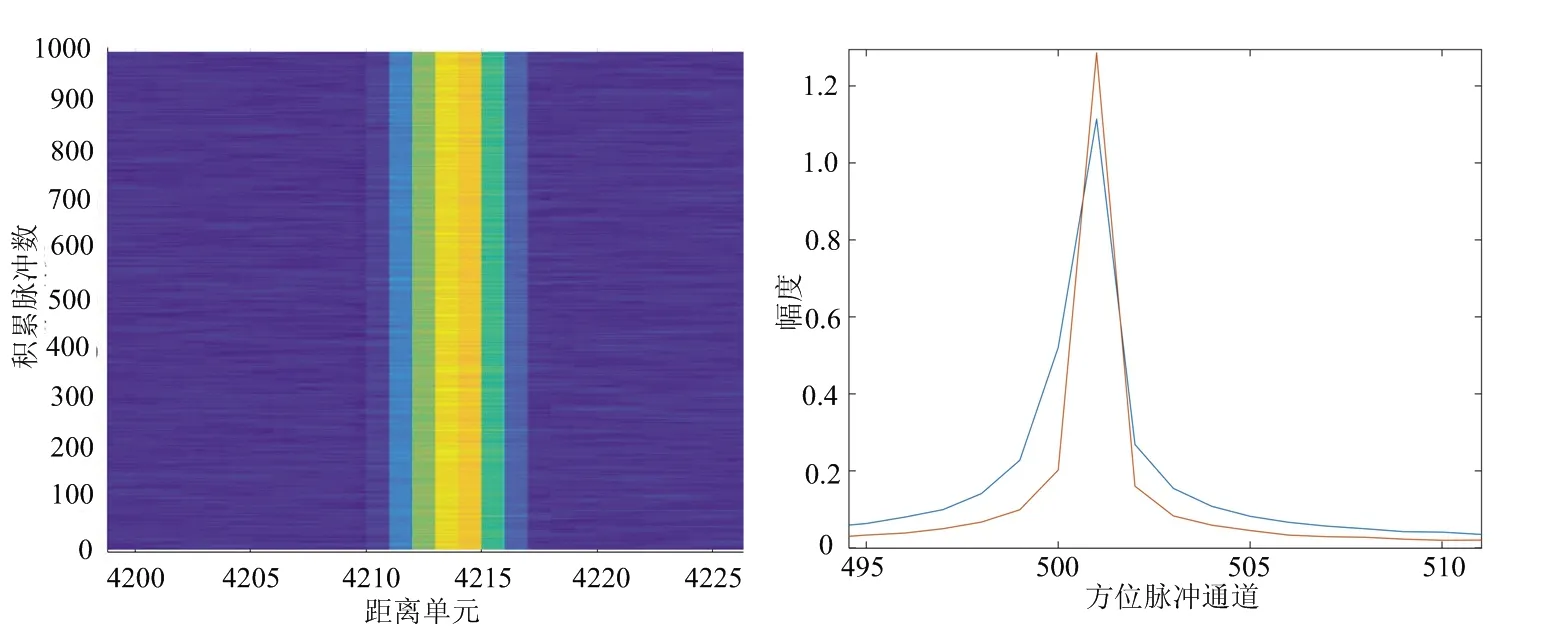
通過圖5理想航線方向速度誤差對回波信號的影響、圖6俯仰方向速度誤差對回波信號的影響和圖7偏航方向速度誤差對回波信號的影響的仿真結果,可以得出以下的結論:1) 當速度誤差很小時,時延走動誤差可以忽略,但多普勒相位誤差依然存在;2) 當速度誤差較大時,即使對回波信號進行了走動矯正,距離走動和多普勒擴散依然存在,會使得信號能量無法有效的積累;3) 沿理想航線方向速度誤差主要引起主瓣位置偏移、主瓣峰值下降和主瓣展寬;4) 沿俯仰方向和偏航方向速度誤差主要引起主瓣峰值下降和主瓣位置偏移;5) 沿俯仰方向速度誤差的限制條件相比于其他兩個方位要更苛刻,對誤差的容忍度最低。
表3 速度誤差仿真參數
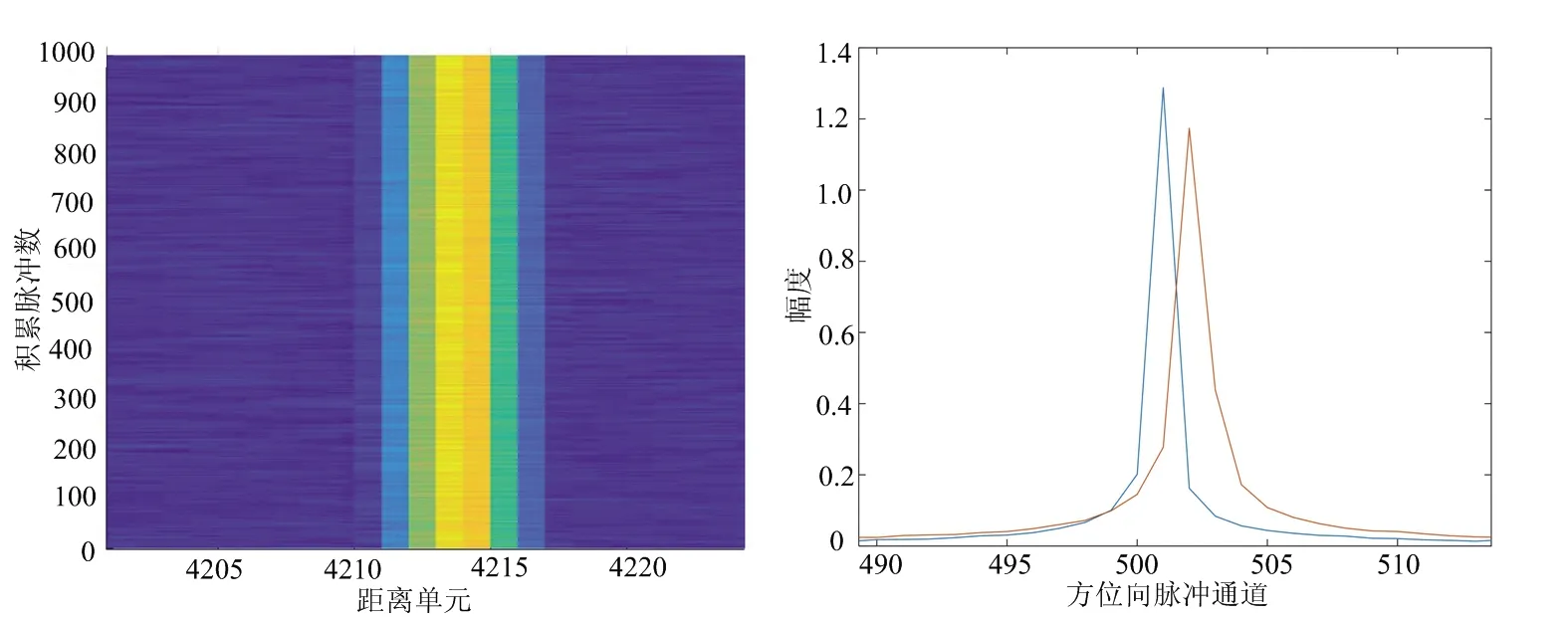
(a) 時延走動(0.05,0.1)m/s (b) 多普勒相位(0.05,0.1)m/s
(c) 時延走動(8,0.1)m/s (d) 多普勒相位(8,0.1)m/s圖5 理想航線方向速度誤差對回波信號的影響
(a) 時延走動(0.001,0.007)m/s (b) 多普勒相位(0.001,0.007)m/s
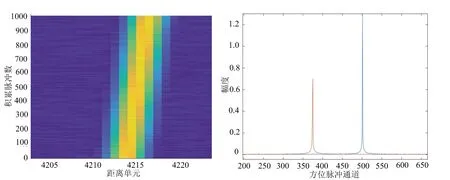
(c) 時延走動(5,0.007)m/s (d) 多普勒相位(5,0.007)m/s圖6 俯仰方向速度誤差對回波信號的影響
(a) 時延走動(0.05,0.01)m/s (b) 多普勒相位(0.05,0.01)m/s
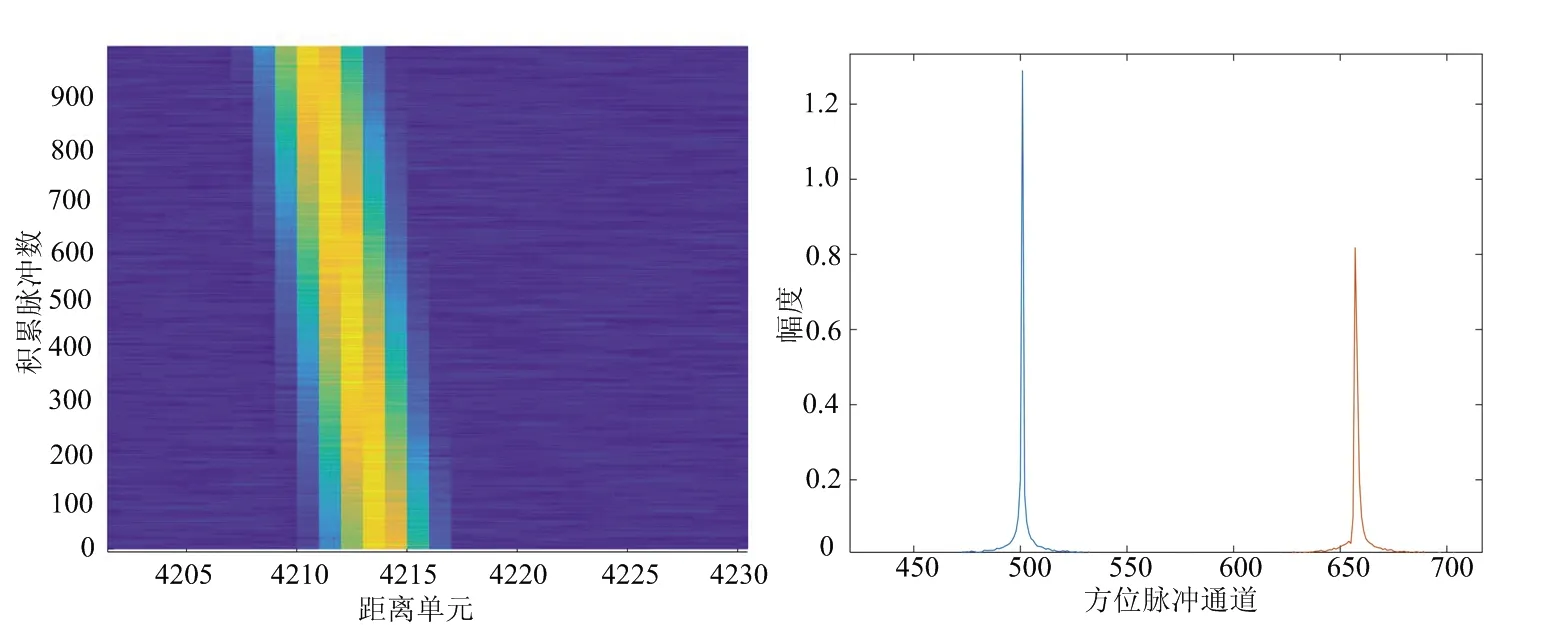
(c) 時延走動(8,0.01)m/s (d) 多普勒相位(8,0.01)m/s圖7 偏航方向速度誤差對回波信號的影響
4 結束語
本文基于雙基雷達平飛斜側視模型,沿著3個方位對速度誤差分別進行了研究,并給出了速度誤差沿著3個方位的限制條件解析表達式,為工程設計和實現提供了相關依據和參考。通過理論分析和仿真驗證,證明了俯仰方向的速度誤差限制條件相比于其他兩個方位(理想航線方向和偏航方向)更為苛刻。此外,相比于時延走動,多普勒相位對速度誤差的敏感度更高,對目標檢測和成像的影響更大。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00