電動輪椅減震、智能變速及自動避障設計
2022-07-01 01:31:04張澤江柳青譚想王凱
裝備維修技術 2022年7期
張澤江 柳青 譚想 王凱
摘? 要:一方面,人口老齡化問題是當今社會一大問題,另一方面,因為各種事故而導致下肢殘疾人數成千上萬,他們喪失了行走能力,生活極為不便。為了給老齡人以及殘障人士提供結構簡單、穩定性好、操作簡單的人性化代步工具,本文設計了一款新型電動輪椅,該產品具有省力、減震、智能變速及自動避障功能,極大的改善了這類人群的生活方式。
關鍵詞:電動輪椅 減震 智能變速 自動避障
1.緒論
1.1研究背景
隨著社會發展,人口數量增長速度變慢,中國正處于人口老年化社會迅速發展的階段,另外我國殘障人士也越來越多。老年人和殘障人士的出行和生活面臨著很大的困難。隨著經濟發展,國家醫療保健系統發展健全,人們對殘障人士和老年人的關心也是與日俱增,老年人出行也逐漸成為一個需要關注的問題。
1.2產品現狀
當前市面上輪椅種類也是各種各樣,但是并不能滿足所有老年人及殘障人士的需求。隨著科技不斷發展、智能化不斷普及,需要輪椅的智能化來幫助老年及殘障人士來完成一系列需求。
中科院自動化研究所研究的智能輪椅是我國第一輛多功能智能輪椅,該輪椅采用嵌入式控制技術、多傳感器信息融合技術和語音導航技術,使用戶能夠簡便控制,為后續的輪椅研究方向提供了思路。
上海交通大學關于智能輪椅研發也取得了很大的成果。采用攝像頭和激光雷達測距傳感器采集輪椅周圍環境信息,使輪椅有定位、導航、避障功能;通過觸摸顯示屏與用戶進行人機交互,方便用戶的指令下達。
本設計主要通過施加動力、減震機構、自動避障設計等對輪椅進行改造。
2.設計方案
2.1機械結構設計
本設計以常見輪椅作為基礎框架,大眾熟悉的結構能使老年殘障人士更快的熟悉機械結構及各項功能的實現。
2.1.1動力部分設計
坐墊下部,為輪椅增加動力裝置—蓄電池,選擇的蓄電池體型較小,并且具有充足能源和強力續航能力。
2.1.2減震部分設計
首先在后輪中增加阻尼減震器,可以大大增加輪椅越野能力,適應各種路況的。
輪椅前輪設計原理:采用高強度耐磨樹脂進行分葉片式設計,每個葉片單獨內置彈簧,所有葉片安裝后組合成一個圓型輪,在運行過程中各個葉片進行單獨伸縮來適應各種路況從而使輪椅運行平穩,做到對各種路況的自適應模式。
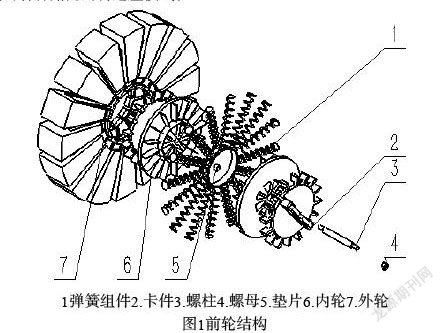
前輪結構如圖1,內輪6分成16個區,每個區可以安裝一個彈簧,在內輪的內圈中設計了16個高度和深度都是1毫米的凸起和凹陷,方便固定內輪同時鎖住彈簧,使彈簧只能做伸長或收縮運動。
外輪7由16個葉片組成,葉片與葉片徑向之間留有縫隙,是為了能讓這16個部分能有較大的運動空間。在每個葉片中間各開一個方槽,通過這個方槽實現內輪與外輪的連接并且使外輪的運動軌跡固定。
卡件2的凸起與外輪內圈方槽咬合,從而可以使外輪維持圓形,卡件可以帶動外輪旋轉,同時外輪可以沿徑向在彈簧作用下移動。
2.2智能變速及自動避障設計
智能電動輪椅采用了壓力傳感器,通過計算,將避震器彈簧的壓縮量與傳感器上的壓力大小相對應。在實踐中測出電動輪椅正常行駛且路況良好時的壓力值作為標準壓力值。在電動輪椅行駛過程中,通過壓力傳感器將避震器的壓縮量實時反饋給控制系統,與標準壓力值做比較。將實時反饋量與標準壓力值之間的誤差,因檢測過程中可能會出現干擾,致使壓力傳感器傳回的數據包含噪音,所以在控制系統中加入了卡爾曼濾波利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計,采集穩定的數據。經過卡爾曼濾波器后得到的結果記作誤差,若誤差在給定周期內僅在無限趨近的附近輕微波動,則視當前路況良好,電機穩定輸出;當檢測到誤差的值在給定的周期內波動劇烈時,則視當前路況不佳,此時,使用PID控制算法在理論上可以證明,對于過程控制的典型對象──“一階滯后+純滯后”與“二階滯后+純滯后”的控制對象,PID控制器是一種最優控制。
電機端的反電動勢作為速度環的反饋信號采集,反饋值在單片機中做 PID 計算,根據計算結果,調整PWM的輸出波形,輸出當前指令速度的 PWM信號,使電機始終處于當前控制指令中的速度。在控制電機加減速的過程中,需要注意加減速曲線的平滑,否則會造成電機的控制不平穩,甚至造成設備的損壞。如果加減速曲線調節的足夠光滑,電機速度的變化會非常穩定,不會使設備或者其他電機驅動的裝置發生震顫。
PID調節規律是連續系統動態品質校正的一種有效方法,它的參數整定方式簡便,結構改變靈活,將傳感器上的壓力值作為輸入量,標準壓力值作為目標量,將計算結果用于控制電機轉速,同時設置PID計算的輸出限幅,限制了電動輪椅的最大速度解決誤操作問題,做到降低輪椅速度的同時,使電機的轉速隨路況而改變,由此,即保障的使用者的安全,有提高了輪椅的舒適性。
輪椅采用了激光雷達避障系統,可以掃描輪椅周圍的障礙物,通過算法計算輪椅與障礙物的距離,給出合理避障方案,還會語音提示,并在駕駛者誤操作距離障礙物30cm處緊急制停。
3.結束語
現代輪椅的發展向著更加智能與舒適的方向不斷前進,本文通過對輪椅設計改造,實現了省力、減震、智能變速及自動避障功能,方便了使用者。
參考文獻
[1]杜妍辰.基于智能輪椅的電磁減震裝置設計[J].生物醫學工程學進展,2018,39(3):135-137
[2]孫楚杰. 智能輪椅運動控制和自動避障系統研究[D].湖北:湖北工業大學2020
[3]楊馥華,康婷霞. 無刷電機 PWM 調速系統設計[J]電子設計工程,2021,29(7):124-128
項目來源:2021年遼寧省大學生創新創業項目,編號202110148014
通訊作者:柳青,女,講師,碩士,從事機械產品設計
第一作者:張澤江,男,本科生
