基于特征點匹配的無人機遙感圖像快速拼接系統
2022-06-29 06:08:32盧征
電子設計工程 2022年12期
盧征
(河南省有色測繪有限公司,河南安陽 455000)
遙感圖像應用十分廣泛,目前針對遙感圖像研究的熱點主要集中在多角度航空影像的三維建模、目標檢測和跟蹤等方面[1-2]。有學者提出利用AKAZE算法來解決無人機遙感影像的匹配拼接問題,AKAZE 算法能夠保存遙感影像的紋理結構和局部信息,具有很好的拼接效果,因此傳統系統提出利用AKAZE 算法進行無人機遙感圖像快速拼接。雖然該系統能夠快速有效地提取特征,并能顯著減少特征點,提高效率,但耗時較長,算法有待改進。基于光線特性,相關學者提出了一種改進的快速圖像拼接系統,該系統能在保持配準速度的前提下,達到亞像素級配準精度,并具有良好的場景適應性,但是拼接速度較慢[3]。
目前,提出的拼接系統在拼接速度上都難以達到人們的要求。因此該文利用特征點匹配提出了一種新的無人機遙感圖像快速拼接系統,利用AKAZE 算法提取圖像的特征點,對特征向量進行描述,得到圖像的主方向,實現圖像的精確匹配。采用特征點提取時間、匹配精度等指標對該方法進行分析驗證,并與其他系統進行了對比,從而驗證文中系統的可行性。
1 系統硬件設計
設計的無人機遙感圖像快速拼接系統硬件主要由采集器、處理器、拼接控制器3 部分組成,系統硬件結構如圖1 所示。
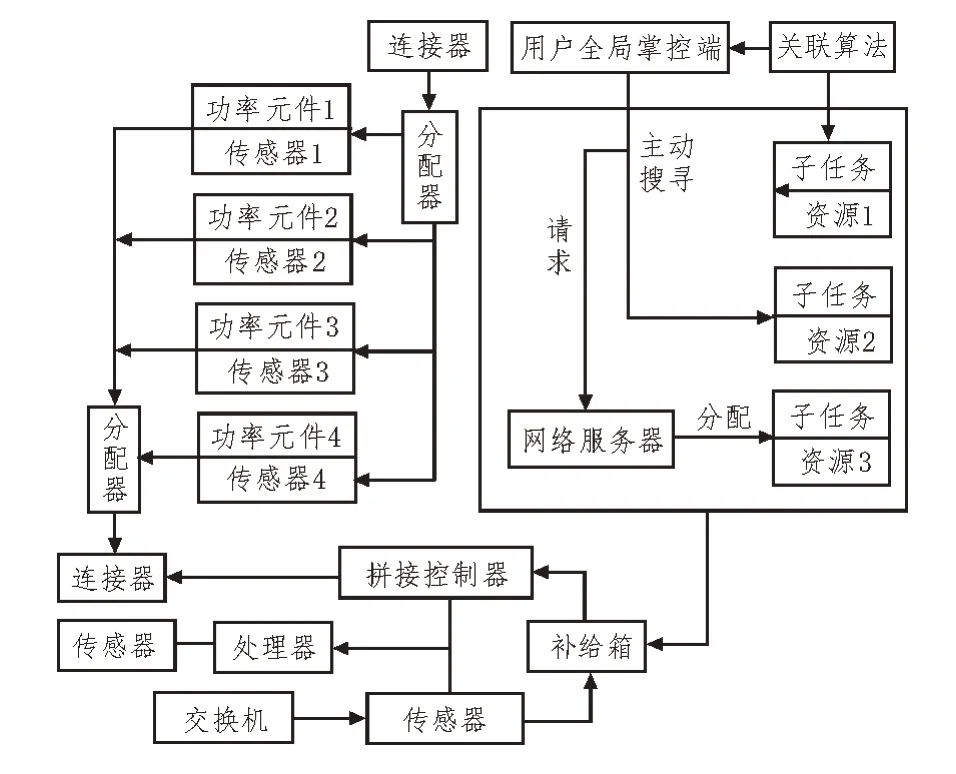
圖1 無人機遙感圖像拼接系統硬件結構
1.1 采集器設計
采集器是提出的遙感圖像快速拼接系統的基本設備[4],其作用是執行各項操作指令,采集器主要包括數據采集單元、中央處理單元和載波調制解調單元,采集器結構如圖2 所示。
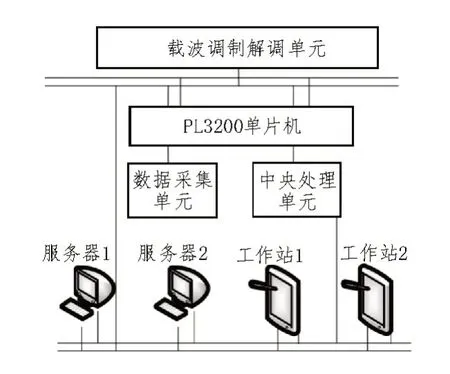
圖2 采集器結構
采集器內部引入PL3200 芯片,該芯片同時具備采集、計算能力,利用RS485 串行通信口實現系統初始化。PL3200 芯片能夠提高系統的開發速度,內部的8/16 位雙模式能夠很好地提高運行速度,增強數據處理能力[5-6]。同時,PL3200 芯片外部設計了兩個全雙工結構,通信模式分別采用了紅外通信模式和RS485 通信模式,可為不同的數據實現信息傳輸。采集器電路圖如圖3 所示。引入的PL3200 芯片采用雙通道電流實現采樣,能夠很好地防止竊電。

圖3 采集器電路圖
1.2 處理器設計
文中選用的處理器為Power7處理器,該款處理器經過多年的研發,相比于Power1 處理器,Power7 處理器取得了巨大的進步[7-8]。處理器示意圖如圖4所示。

圖4 Power7處理器示意圖
圖4 中的Power7 處理器具有很好的運算速度,工作性能更加優異,Power7 處理器的內部節點能夠支持兩個以上3.8 GHz 的8 核模塊運作[9],系統工作能力強,Power7 處理器的邏輯結構內部的核心為Power PC 核心,核心機構的執行條令位數為64 位,每個處理器都能執行多個指令,最高可達到200 條指令,處理器工作頻率為1.5 GHz,引入緩存可以更好地完成信息交互,使采集器采集到的數據流更加順利地流通和傳遞。
1.3 拼接控制器設計
在設計的遙感圖像快速拼接系統中,拼接控制器為核心設備,該控制器有利于圖像在大屏幕上顯示,從而帶來更好的視覺體驗[10]。設計的拼接控制器內部采用分布式處理器,通過數字網絡將采集的數據和傳輸的數據連接起來,更好地在大屏幕上展示。拼接控制器分散結構能夠使輸入節點和輸出節點更好地分開,提高了系統的靈活性,使系統能夠進行圖像信號多點共享,使網絡圖像具備輸入功能和移動終端控制功能[11-12]。拼接控制器的工作原理如圖5 所示。
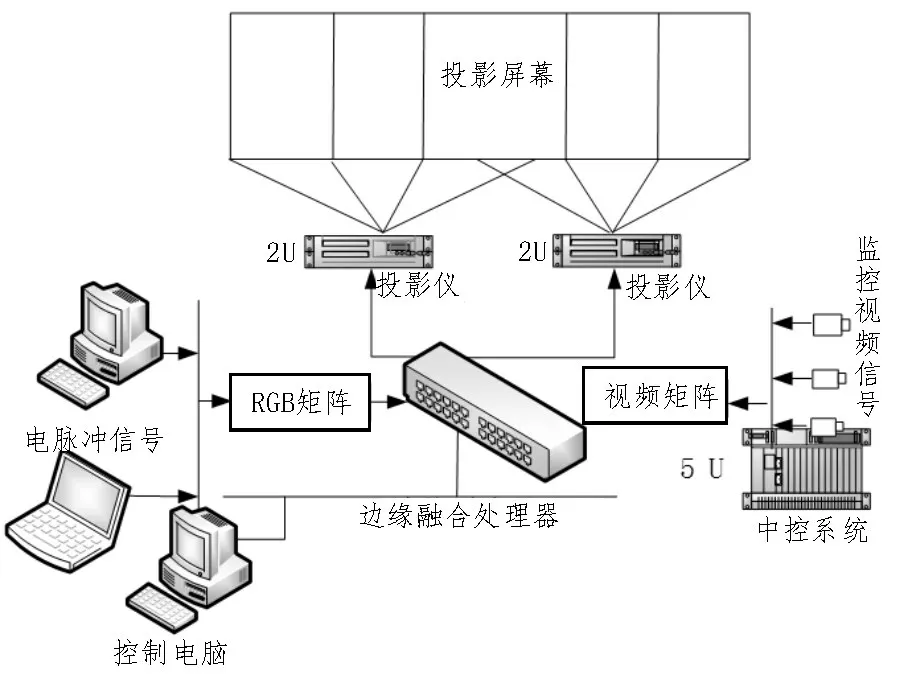
圖5 拼接控制器的工作原理
設計的拼接控制器引入了WT-20 邊緣控制器,該控制器采用嵌入式結構,使用了目前國內比較先進的邊緣融合技術,控制器內部設置了一個超高分辨率的單一邏輯屏幕,屏幕之間不存在拼接縫隙,這樣在大屏幕上顯示的數據就是所有顯示單元的拼接總和。設計的拼接控制器能夠同時顯示視頻信號、RGB 信號以及圖文信號,具備窗口漫游功能,能夠實時顯示各種信息。
2 系統軟件設計
利用AKAZE 算法提取特征點,利用可變傳導函數建立尺度空間,從而檢測非線性擴散濾波,設定得到的無人機遙感圖像亮度為L,得到的流動函數散度的計算公式如下:

式中,t表示尺度參數;c(x,y,t)為模糊識別參數,ΔL表示傳導函數。如果傳導函數為正常值,則得到的擴散自適應圖像局部結構也為正常值[13]。根據式(1)可知,隨著t值的增加,圖像表達復雜程度越來越小。
構造非線性尺度空間,分析尺度級別的改變,利用尺度參數判斷每一層的圖像分辨率是否和最初分辨率相同。尺度參數的計算公式如下:

式中,σ0表示在圖像拼接過程得到的初始值;M表示拼接圖像尺度空間的影像總數;σi(m,s)表示尺度參數的匹配關系。
進化的時間ti為:

在處理無人機遙感圖像的過程中,引入高斯濾波函數,得到數據特征,在大屏幕上顯示梯度直方圖,從而確定對比度參數[14]。構建非線性尺度空間,利用歸一化處理,得到無人機遙感局部的極大值點,設定采集矩陣為:

式中,σ為尺度參數σi的平均值。通過獲取極值點,得到更加確切的像素點,將得到的像素點與無人機遙感周圍其他的像素點對比,從而得到特征點的位置,利用亞像素實現精準定位,得到特征點的準確位置。
在確定特征點位置后,確定特征點所在的范圍,從而獲得鄰域,將鄰域以均分的方式分成36 個方向直方圖,在直方圖中確定最大值特征點的主方向[15]。尋找計算結果直方圖的峰值,將得到的直方圖峰值與最大直方圖峰值進行比較,如果得到的峰值結果超過80%,則該方向的峰值方向為輔助方向,在輔助方向中可以尋找1/5 特征點的數據。在無人機遙感圖像拼接中,特征點發揮著非常重要的作用,輔助方向的特征點能夠很好地提高數據匹配拼接過程的穩定性[16]。
在拼接過程中,需要對主方向的特征點進行校正,校正后的特征點可以生成描述點,從而進化成特征向量,該特征向量維度為128 維,確定特征向量后,進行歸一化處理,改善由于光照而導致的匹配率降低的情況。
3 實驗研究
為了驗證提出的基于特征點匹配的無人機遙感圖像快速拼接系統的有效性,與傳統的拼接系統進行實驗對比,選用的傳統系統分別是基于AKAZE 算法的無人機遙感圖像快速拼接系統、基于光纖特性的無人機遙感圖像快速拼接系統,分析系統拼接過程的耗時情況和拼接結果精準度。
設定運行過程的實驗參數如表1 所示。
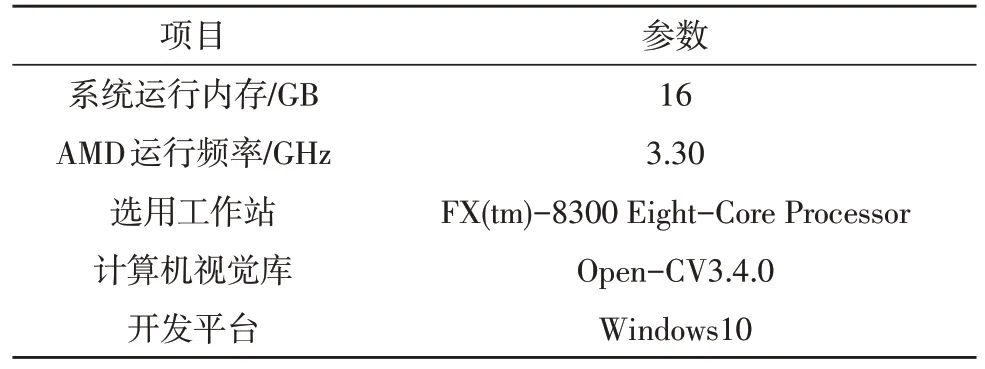
表1 實驗參數
根據表1 中參數對圖6 中的不同無人機遙感圖像進行拼接。

圖6 實驗影像
選用文中系統和傳統系統對圖6 中的實驗影像進行拼接,得到的拼接過程耗時實驗結果如表2所示。
根據表2 可知,在對圖6(a)的圖像進行拼接時,基于AKAZE 算法的無人機遙感圖像快速拼接系統與提出的基于特征點匹配的無人機遙感圖像拼接耗時相差較小,提取的特征點數也相對較少;而基于光纖特性的無人機遙感圖像快速拼接系統耗時最長,性能最差。在對圖6(b)的圖像進行拼接時,提出的基于特征點匹配的無人機遙感圖像快速拼接系統的耗時要遠遠小于傳統系統,主要是因為提出的特征點匹配算法能夠很好地縮減非線性尺度空間的構造時間。匹配精準度實驗結果如圖7 所示[17]。
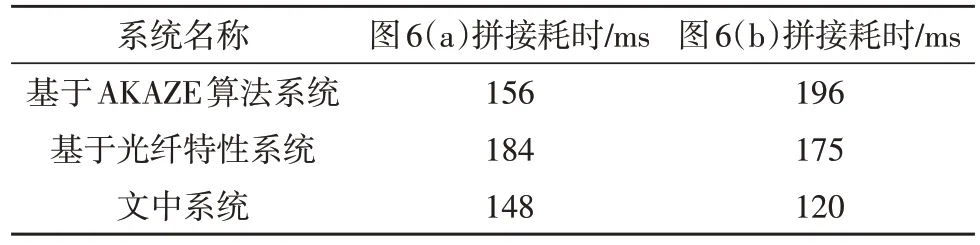
表2 拼接耗時實驗結果

圖7 匹配精準度實驗結果
根據圖7 可知,提出的拼接系統拼接精度高,在拼接過程中,提出的系統能夠更好地確定特征組合的正確匹配點,因此拼接速度快,精準度高。
綜上所述,文中提出的基于特征點匹配的無人機遙感圖像快速拼接系統具有很好的拼接效果,能夠有效縮短拼接時間,更加適合無人機遙感影像匹配工作。
4 結束語
文中設計的基于特征點匹配的無人機遙感圖像快速拼接系統將拼接技術和三維重建技術有效結合在一起。實驗結果表明,特征組合算法能夠很好地提高匹配速度,減少冗余計算量。與傳統系統相比,文中提出的拼接系統拼接速度更快,更適合應用到無人機遙感影像匹配工作中。
無人機遙感圖像拼接還在不斷發展中,未來對于圖像拼接的清晰度要求更加嚴格,可以對此進行更加深入的研究。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
裝備制造技術(2019年12期)2019-12-25 03:06:46
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54