基于釹鐵硼磁鐵的吸附式多功能越障管外爬行機(jī)器人結(jié)構(gòu)設(shè)計
2022-06-26 12:50:20李一凡鄭義周淑于艷杰王志偉
科教創(chuàng)新與實踐 2022年10期
李一凡 鄭義 周淑 于艷杰 王志偉

摘要:針對管道檢查和維修的一些特殊工作環(huán)境的需求,設(shè)計了具有磁性吸附裝置的多功能越障管外爬行機(jī)器人。該機(jī)器人能夠?qū)崿F(xiàn)在具有磁性的水平管道、豎直管道、彎曲管道等進(jìn)行行走、跨越、旋轉(zhuǎn)等動作。利用Solid Works建立了機(jī)構(gòu)模型,分析了在通過不同管道,進(jìn)行爬行時的機(jī)器人的運動狀態(tài),為樣機(jī)的研制提供參考依據(jù)。研究結(jié)果表明:該磁性吸附多功能越障管外爬行機(jī)器人結(jié)構(gòu)設(shè)計方案是有效合理的。
關(guān)鍵詞:管外爬行;磁性吸附;多功能;越障;機(jī)器人
1 引言
目前,由于大多數(shù)管道檢查和維修工作主要依靠工作人員爬管來完成,勞動強(qiáng)度大,工作效率低;尤其是許多工業(yè)管道輸送的是高溫、高壓、劇毒、有輻射的流體,這就進(jìn)一步加大了工作的危險性[1]。因此,迫切需要研發(fā)一種具有攀爬和越障功能的基于釹鐵硼磁鐵的吸附式多功能越障管外爬行機(jī)器人,以此代替人力對管道進(jìn)行定期的檢查和維修。
但現(xiàn)有的一些管外爬管機(jī)器人,在實際使用時依舊存在運動模式單一、適用局限性大等問題,具體體現(xiàn)為無法使其吸附或抱緊在管道上,大多數(shù)只能沿著管道方向行走,不具備繞管道旋轉(zhuǎn)的功能;有的無法跨越管道上的障礙,有的只能攀爬豎直或水平的管道,有的甚至不能連續(xù)地經(jīng)過管道各處的外表面,難以滿足一些對各種姿態(tài)的管道外表面進(jìn)行連續(xù)檢測或維護(hù)的需求[1]。
因此,本文設(shè)計一種基于釹鐵硼磁鐵的吸附式多功能越障管外爬行機(jī)器人結(jié)構(gòu)設(shè)計,以解決上述背景技術(shù)中提出的問題。
2 基于釹鐵硼磁鐵的吸附式多功能越障管外爬行機(jī)器人機(jī)械結(jié)構(gòu)設(shè)計
2.1 結(jié)構(gòu)設(shè)計
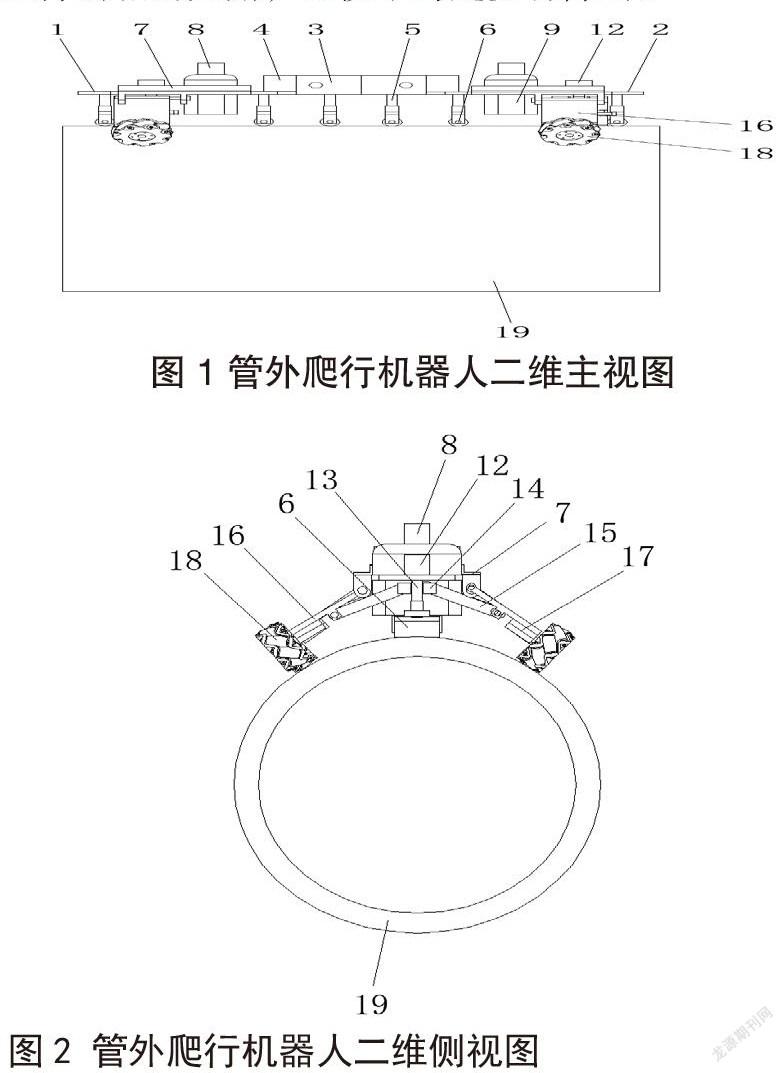
本文設(shè)計了一種基于釹鐵硼磁鐵的吸附式多功能越障管外爬行機(jī)器人(以下簡稱為管外爬行機(jī)器人),結(jié)構(gòu)設(shè)計如圖1、圖2以及圖3所示。
管外爬行機(jī)器人整體是由前車體和后車體組成,而前車體與后車體之間的頂部設(shè)置有翻轉(zhuǎn)架;在前車體與后車體頂端的一側(cè)皆固定有舵機(jī),且舵機(jī)的輸出端分別與翻轉(zhuǎn)架內(nèi)部的一側(cè)轉(zhuǎn)動連接;前車體與后車體頂端的中心位置處皆固定有橫架,且橫架頂部的一側(cè)皆安裝有步進(jìn)電機(jī)[2];而步進(jìn)電機(jī)的輸出端皆通過聯(lián)軸器安裝有螺紋絲桿[3],且兩個螺紋絲桿分別位于前車體和后車體的下方;螺紋絲桿上皆套裝有絲桿銅套,且絲桿銅套的外側(cè)壁上皆對稱鉸接有兩個連桿;連桿的一端皆與輪臂的中部轉(zhuǎn)動連接,且兩組輪臂的一端分別與所述橫架底端的兩側(cè)轉(zhuǎn)動連接;輪臂的另一端皆固定有直流電機(jī),且直流電機(jī)的輸出端皆軸向安裝有麥克納姆輪,前車體與后車體皆設(shè)置于管道的表面,且兩組麥克納姆輪的底端皆與所述管道的表面滾動接觸。
通過舵機(jī)控制前車體或后車體關(guān)于翻轉(zhuǎn)架垂直旋轉(zhuǎn),并通過電缸推動磁吸附塊關(guān)于橫架垂直升降。
磁塊是由釹鐵硼磁鐵組成;此磁塊可以吸附本身重量的640倍的重量,而且釹鐵硼具有體積小、重量輕和磁性強(qiáng)的特點;而它是迄今為止性能價格比最佳的磁體[4],所以這可以使得前車體或后車體更好的緊密貼合管道表面,不會掉落;同時利用支撐柱底端的滾輪進(jìn)行輔助支撐,維持與管道表面的相對間隔。
該機(jī)器人車體無需包圍在管道外部,從而適用于在各種模式的管道表面上運動,可跨越多種障礙。
通過步進(jìn)電機(jī)控制螺紋絲桿定量旋轉(zhuǎn)[5],使得絲桿銅套帶動連桿線性偏轉(zhuǎn),則輪臂將聯(lián)動旋轉(zhuǎn),使得直流電機(jī)和麥克納姆輪反向擴(kuò)展或收縮,從而適用于不同管徑的管道,實用性強(qiáng)[6-8]。
此設(shè)計的管外爬行機(jī)器人不僅可以通過不同管徑的管道表面,可以在各種模式的管道表面運動,并可自動調(diào)節(jié)輪臂等組件的相對夾角,以便于跨越多種障礙。
2.2 Solid Works三維模型建立
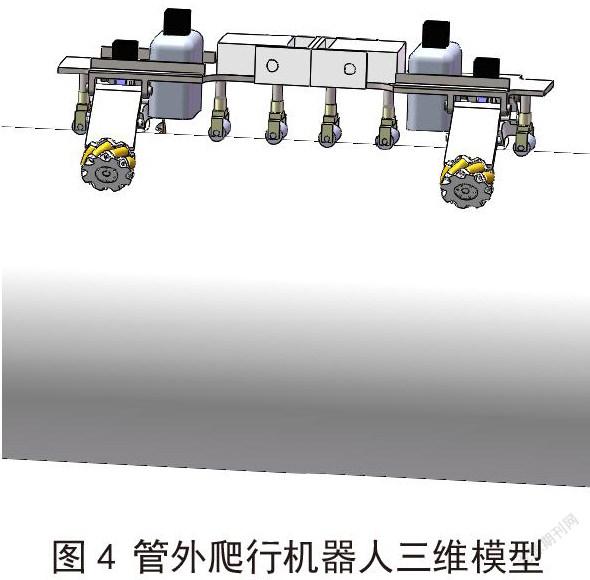
用Solid Works建立管外爬行機(jī)器人的三維模型,結(jié)構(gòu)示意圖如圖4所示。機(jī)器人整體包括了車體模塊、輪臂機(jī)構(gòu)、吸附模塊、支撐模塊以及翻轉(zhuǎn)機(jī)構(gòu)。
3 越障管外爬行機(jī)器人爬行工作原理分析
3.1 在水平的直行管道前行或者后退
如圖5,管外爬行機(jī)器人在水平的直行管道前行或者后退時,即直接操控前車體1和后車體2兩側(cè)的直流電機(jī)17同速同向運行,使得四個麥克納姆輪18的同速度順時針或逆時針轉(zhuǎn)動,實現(xiàn)前車體1和后車體2的同步前進(jìn)或后退。
3.2 繞管道左右旋轉(zhuǎn)
同上圖,管外爬行機(jī)器人在水平的直行管道左右旋轉(zhuǎn)運行時,即直接操控前車體1和后車體2兩側(cè)的直流電機(jī)17同速同向運行,使得四個麥克納姆輪18的同速度順時針或逆時針轉(zhuǎn)動,實現(xiàn)前車體1和后車體2的同步前進(jìn)或后退。
3.3 跨越豎直十字型或L型管道
如圖6,管外爬行機(jī)器人在跨越豎直十字型或L型管道時的工作原理如下:
(1)步驟一:在L型管道19附近處,通過將機(jī)器人車體旋轉(zhuǎn)到與L型管道19處于同一平面內(nèi),通過控制后車體2中的電缸8伸長,利用下降的磁吸附塊9使得后車體2對管道19的吸附力增強(qiáng),并反向操作使得將前車體1對管道19的吸附力減弱,隨后,通過舵機(jī)4的驅(qū)動,將前車體1關(guān)于翻轉(zhuǎn)架3旋轉(zhuǎn)上抬90°,即可使得前車體1的底面對著L型管道19的另一段,再通過后車體2兩側(cè)的直流電機(jī)17驅(qū)動兩個麥克納姆輪18,使前車體1往前運動;
(2)步驟二:當(dāng)前車體1接觸到L行管道19的另一段時,通過控制前車體1中的電缸8水平推移磁吸附塊9,使得前車體1對管道19的吸附力增強(qiáng),并反向操作使得后車體2對管道19的吸附力減弱,通過舵機(jī)4的驅(qū)動,將后車體2旋轉(zhuǎn)抬起脫離原來的管道19,通過前車體1兩側(cè)的直流電機(jī)17驅(qū)動兩個麥克納姆輪18,使前車體1繼續(xù)往前運動,當(dāng)后車體2通過L型管道19的節(jié)點處,通過舵機(jī)4的反向驅(qū)動,將后車體2降落在管道19上,通過調(diào)整兩個電缸8的伸長量,使得兩個磁吸附塊9對管道19的吸附力恢復(fù)至原來大小,即可繼續(xù)前行。
4 總結(jié)
本文設(shè)計了基于釹鐵硼磁鐵的吸附式多功能越障管外爬行機(jī)器人結(jié)構(gòu),通過Solid Works進(jìn)行三維建模,解決了在實際使用時依舊存在運動模式單一、適用局限性大等問題。根據(jù)工作方法要求,使其可以通過不同管徑的管道(或圓柱)表面,可在各種類型的管道(或圓柱)表面運動,并可調(diào)節(jié)輪臂等組件的相對夾角,以便于跨越多種障礙,從而滿足對具有磁性的管道(或圓柱體)的質(zhì)量檢測、維護(hù)修復(fù)等作業(yè),為以后的樣機(jī)開發(fā)與研制奠定了基礎(chǔ)。
參考文獻(xiàn):
[1] 鄭義, 周淑芳, 鄧傳云. 關(guān)節(jié)式爬管機(jī)器人夾緊機(jī)構(gòu)的優(yōu)化研究[J]. 機(jī)電工程, 2015,32(03):328-332.
[2] 馬帥. 袋裝物料智能裝車系統(tǒng)關(guān)鍵技術(shù)研究[D]. 河北科技大學(xué), 2018.
[3] 武振昕. 基于DSP振動信號采集系統(tǒng)的開發(fā)與應(yīng)用[D]. 廣東工業(yè)大學(xué), 2013.
[4] 李偉, 梁靜秋, 李小奇, 等. 一種微型光開關(guān)的設(shè)計與仿真分析[J]. 光學(xué)學(xué)報, 2008(06):1151-1154.
[5] 張曉燕, 盧照新, 劉學(xué)君, 等. 基于MSP430的直線導(dǎo)軌定位裝置的設(shè)計與實現(xiàn)[J]. 計算機(jī)測量與控制, 2017,25(07):186-189.
[6] 杜毅豪, 劉鵬宇, 宋若薇, 等. 基于麥克納姆輪的室內(nèi)自主搬運小車[J]. 電子世界, 2020(09):204-206.
[7] 關(guān)強(qiáng). 可重構(gòu)式排水管道機(jī)器人結(jié)構(gòu)研究與動力學(xué)分析[D]. 哈爾濱工程大學(xué), 2018.
[8] 王美奇, 劉泓愷, 陳均峰, 等. 自適應(yīng)管道缺陷檢測爬行器結(jié)構(gòu)設(shè)計[J]. 機(jī)電工程技術(shù), 2020,49(02):138-140.
國家級大學(xué)生創(chuàng)新創(chuàng)業(yè)項目:多功能越障管外爬管機(jī)器人結(jié)構(gòu)設(shè)計與研究,S202013320011.
