基于新一代測繪技術的水上水下地形一體化測量及庫容測定——以淄博市馬踏湖為例
2022-06-24 07:22:28江偉偉
科學技術創新 2022年18期
關鍵詞:測量
江偉偉 魏 鵬 高 洋
(淄博市水文中心,山東 淄博 255000)
1 概述
智慧水利水資源的調度、洪水的演進分析、風險模擬預警以及生態管理等需要高精度的水上水下精準地形作為支撐[1]。水庫和湖泊的庫容在確定水資源的調度、洪水演進分析中發揮著重要作用。影響水庫庫容精度的主要因素包括庫容的計算方法以及庫區的地形數據。其中庫容的計算方法主要有斷面法、等高線法等[2,3],其成果精度較低,難以滿足智慧水利應用需求。隨著測繪計算理論的進步,基于特征點的三角網法和密集點云的格網法用于庫容的精確庫容測定[4]。庫區的地形數據主要包含陸表地形和水下地形兩部分。早期,主要采用全站儀或RTK 方式進行測量特征點的陸表特征信息,利用測深桿或測深錘獲取水下地形特征信息,該技術僅能采集少量的特征點刻畫陸表和水下地形[5]。隨著單波束測深設備的出現,RTK 和單波束設備廣泛應用于水上水下地形信息的采集,該技術能夠快速采集陸表和水下特征點,為基于特征點的三角網估算庫容量提供了數據基礎[6]。新一代測繪技術中,無人機技術由于工作效率高、受地形與環境的限制較小,被廣泛用于大比例尺測繪、資源的調查、電力的巡檢等方面,通過傾斜攝影技術為庫區復雜陸表測量提供了新方法。新一代便攜式多波束測深系統具有高分辨率、高精度、高適用性等特點,通過獲取密集點云數據精確表達水下地形[1,2]。將無人機技術與新一代便攜式多波束測深系統集成,生成密集點云精確模擬復雜庫區的陸表和水下地形,解決庫區地形環境復雜導致的測量困難、測量范圍不全以及精度低的問題。本研究以淄博市馬踏湖為例,采用新一代無人機和多波束測深系統等測繪技術獲取湖區陸表和水下地形數據,并采用密集點云格網法精確計算模擬實驗區庫容,為湖區水資源生態的調度以及智慧化管理提供支撐。
2 測區概況
馬踏湖,位于山東省桓臺縣境東北部,小清河南岸,桓臺縣與博興縣兩縣交界處,地處泰沂山脈北麓山前洪沖積與黃泛沖積平原的迭交凹地。以荊夏公路為界,路南為錦秋湖,路北為馬踏湖,因兩湖彼此銜接,融為一體,故統稱為馬踏湖(見圖1)。地勢呈槽狀東西向條帶分布,由西南向東北緩傾,地跨起風鎮7 個自然村,荊家鎮18 個自然村,田莊鎮13 個自然村和邢家鄉6 個自然村。整個湖區南北長13.5km,東西寬16.5km,總面積124.255km2(其中錦秋湖81.1725km2,馬踏湖43.0825km2),占全縣總面積的24.38%。馬踏湖規劃庫容水量達500 萬m3,平均水深6m,最高水深8m,主湖區約0.78km2,濕地區域約1.5km2。

圖1 馬踏湖測區圖
3 研究方法
湖區地形的測量包括陸表地形和水下地形測量兩部分。陸表地形測量采用固定翼無人機搭載DG3 五鏡頭傾斜相機對馬踏湖主湖區及濕地2.3km2范圍進行數據采集,獲取密集陸表的密集點云。其中DG3 鏡頭有效像素1.2 億,焦距為40mm 像元尺寸為0.0033mm。水下地形采用無人船搭載HN-400 集成多波束測深系統,對馬踏湖主湖區及濕地間交叉的河道進行水深測量,獲取密集點云的水下地形信息。
多波束測深系統與傾斜攝影技術結算結果可以輸出高密度點云的標準網格數據,不需要對數據進行插值與擬合即可建立DEM,因此本研究采用DEM 網格法進行庫容的模擬計算。
4 湖區庫容測量方法
4.1 陸表地形測量采集
陸表地形測量采用P30 固定翼航測系統進行數據采集,該系統采用PPK 差分GNSS 系統,成像精度高,航測POS 定位準確,采用100Hz 超高頻GNSS 解算算法,可以大幅度減少像控點數量。為保證數據采集質量,最終確定航拍時間為12 月1 日晴朗天氣的9:00-16:00,依據研究區實際情況設計了航測的范圍與路線。
陸表地形數據采集需要物理像元尺寸與航高、地面分辨率滿足三角比例關系。測繪過程中依據項目精度需求提前規劃好飛行區域和飛行參數后,進行數據采集,飛行航高為150m,空間分辨率為3.0cm,旁向重疊度75%,航向重疊度85%。
4.2 水下地形數據采集
水下地形數據采用華微號搭載的HN400 多波束系統進行采集。該系統集成了慣導姿態測量設備,能夠準確獲取船體的位置、姿態、速度、升降,加速度和角速度矢量,保證無人船在不同流速、流向變化的復雜條件下按照計劃航線行駛,航線偏離小于20cm,確保多波束數據采集過程中橫搖姿態平穩,提升數據精度。HN400 艏向精度為0.06m@4m 基線,縱橫搖精度為0.03°,水平方向定位精度±(8mm+1ppm)、垂直方向精度±(15mm+1ppm),條帶寬度7°-210°,垂直分辨率小于10mm。
為保證數據采集質量,最終確定水下地形采集時間為12 月1~5 日的8:00-17:00,依據研究區實際情況分為主湖區以及濕地主河道設計了航測的范圍與路線,同時保證條帶覆蓋率在20%以上,HN400 系統支持發射頻率為200 ~700kHz 的聲波,為獲取高分辨率高精度的測深數據,測量中全部采用700 kHz 進行采集,并保持聲波發射開角小于180°。
水下地形數據采集前,進行儀器校準工作,以獲取換能器與姿態傳感器的偏差信息,通過控制系統讓船體走“8”字形,獲取橫搖、縱搖和艏向等系統校準參數,并同步采集剖面聲速數據,計算相關校核系數,保證采集的水下地形數據符合限差要求后,進行湖區和河道的全覆蓋數據采集。
5 水上水下地形數據處理及庫容計算
5.1 無人機傾斜攝影數據處理
航拍影像的處理包括畸變差校正、空中三角解算、影像勻光處理以及點云和正射模型的生成。影像數據量大,處理需要花費大量的時間,而Smart 3D 軟件能夠集群運算并且具備精度高,處理速度快的特點。因此,本研究選擇Smart 3D 軟件進行處理,將無人機拍攝的原始數據導入Smart 3D 軟件中,主要包括傾斜影像數據、PPK 差分解算的POS 數據等。通過將PPK 后差分解算的POS 信息作為每個像元的初始方位元素,利用空間后方交會,計算出每個像元的真實外方位元素,采用多基線多特征匹配技術生成大量的連接點,僅需少量的外業控制點,通過區域網平差,即可完成多視角聯合空中三角解算。空三解算結果滿足精度的情況下,依據解算的三角網信息形成白模并獲取相應的紋理,將紋理自動映射到相應的白模上,最終形生成真實的三維場景模型、DSM、DOM、三維高密度點云及質量分析報告。
馬踏湖國家級濕地保護區陸表無人機數據處理質量報告如表1 所示,數據處理質量報告主要包括區域網空三解算誤差、自檢校誤差以及控制點誤差。

表1 馬踏湖國家級濕地保護區陸表無人機數據處理質量報告
5.2 水下地形數據處理
多波束數據處理主要包括剔除導航、水深等測量數據的粗差,利用檢測線數據對測量數據進行檢核與精度的驗證。本研究采用與多波束測深主測線相垂直的單波束檢查線進行檢核,主測線總長為75.6km,檢查線總長為6.8km,檢查線與主測線之比為0.086,檢核結果如表2 所示,測量結果滿足測深精度評價規范要求。

表2 主測線與檢查線測點高程誤差對比分析
5.3 湖區庫容量計算
結合無人機傾斜攝影與多波束測深技術,獲取了馬踏湖主湖區2.3km2的陸表和水下密集點云數據,兩種數據具有統一的平面坐標系和高程系,利用Quick Terrain Modeler 軟件將陸表和水下點云數據進行融合,形成馬踏湖區水上水下一體化地形數據(圖2)。從圖2 可見無人機傾斜攝影與多波束坐標一致,兩種數據邊緣處無縫對接,融合結果較好。

圖2 馬踏湖主湖區陸表與水下點云融合圖
由于多波束和無人機傾斜攝影采集的點云數據密度高,格網間距固定,不需要進行內插即可建立高精度的DEM。本研究采用DEM 方法進行庫容計算。該方法將水體微分成若干小的立方體,通過對每個立方體的體積求積分得到水庫庫容。其數據計算公式如下:

其中,式1 中n 為淹沒方格網的數量,a 為DEM 方格網邊長,h0為某一設計水位,hi為設計高程以下淹沒的某單元高程,S 為水面面積,V 為設計水位庫容量。
為了準確地繪制馬踏湖湖區的庫容曲線,為防洪、生態流量分析提供科學依據,本研究以0.01m 為間隔,進行庫容計算,結果見圖3。從圖3 可知,輸入對應的水位,即可查詢相應庫容量。本研究預測水位為8.5m 時對應的最大庫容為400 萬m3,與實際情況相吻合。
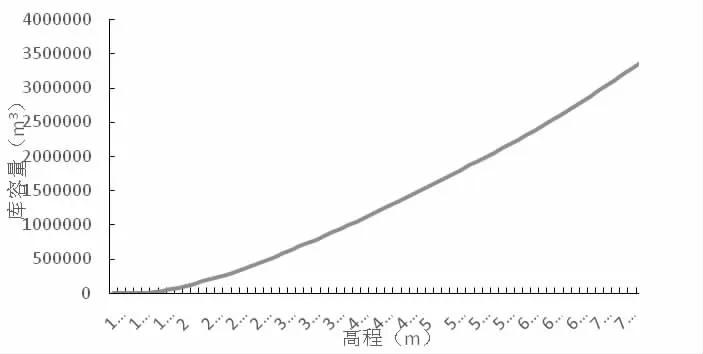
圖3 馬踏湖湖區庫容量模擬圖
6 結論
6.1 無人機與多波束結合的新一代測繪技術具有便攜、效率高等特點,有利于庫區陸表與水下地形的測量,為智慧水利洪水調度、水資源生態管理提供更加精準的三維可視化數據。
6.2 通過數據的處理與分析,驗證了無人機與多波束測量數據的精度,并進行了湖區庫容量的計算與分析,通過實際案例說明了該新一代測繪技術在庫容量測定中的可行性,為水利、水文信息的精細化管理提供可靠的數據,在智慧水利建設中具有重要應用前景。
6.3 本研究采用高密度點云進行計算,數據量大,抽希數據可提高計算效率,如何在保證精度的前提下提高計算效率以及邊緣植被信息的過濾是下一步研究的重點。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00