淺析磁致伸縮位移傳感器的研制
2022-06-24 07:22:54席清波
科學(xué)技術(shù)創(chuàng)新 2022年18期
席清波
(上海希敏自動化設(shè)備有限公司,上海 201102)
在自動化測控領(lǐng)域有很多種測量位移的傳感器,但大都存在一些不足之處,比如電阻位移傳感器響應(yīng)快、使用簡單,但易磨損;LVDT 位移傳感器精度高但量程小;光柵位移傳感器量程大、精度高,但不能用于有振動、污染的場合等。而磁致伸縮位移傳感器是根據(jù)致伸縮效應(yīng)測量游標(biāo)磁環(huán)位置的位移傳感器,由于是非接觸的絕對位置測量,所以不存在信號漂移,無需定期維護和校驗。即使測量過程是不斷重復(fù)的,也不會對傳感器造成任何磨損。有量程范圍大、精度高、響應(yīng)快、穩(wěn)定性好等優(yōu)點,它既可以作為常規(guī)通用的位移傳感器,也可以作為一體化的產(chǎn)品內(nèi)置在油缸中測量活塞的位置,如果把磁環(huán)換成浮球也可以精確的測量各種液位的高度。由于傳感器是全密封結(jié)構(gòu),因而可用于高溫、高壓、腐蝕和沖擊等場合,能適用于各種惡劣的工業(yè)環(huán)境。
1 磁致伸縮位移傳感器的原理和結(jié)構(gòu)
磁致伸縮位移傳感器的測量原理是基于傳感器核心檢測元件磁致伸縮波導(dǎo)絲與游標(biāo)磁環(huán)之間的魏德曼(Wiedeman)效應(yīng),即磁致伸縮效應(yīng)。通過內(nèi)部電路產(chǎn)生脈沖,在波導(dǎo)絲周圍形成周向安培環(huán)形磁場,當(dāng)該磁場與游標(biāo)磁環(huán)的偏置永磁磁場發(fā)生耦合作用時,就會因磁致伸縮效應(yīng)而產(chǎn)生一個機械扭轉(zhuǎn)應(yīng)力波,該扭轉(zhuǎn)應(yīng)力波以一定的速度(2830m/s)沿波導(dǎo)絲返回并被感應(yīng)電路所拾取,通過計算發(fā)射脈沖與回波信號的時間差就能精確計算出游標(biāo)磁環(huán)的位置即位移。
磁致伸縮位移傳感器主要由測量桿、游標(biāo)磁環(huán)、電子倉等部件組成。測量桿一般選非磁性的剛性材料(如不銹鋼管),內(nèi)有波導(dǎo)絲(磁致伸縮線)、保護套管、末端阻尼器等。電子倉內(nèi)含測量控制電路和感應(yīng)線圈等。在電子倉內(nèi)波導(dǎo)絲的同一個位置分別向兩邊各焊接一條金屬帶(須與波導(dǎo)絲是同一種材質(zhì)),金屬帶穿過感應(yīng)線圈的中心,當(dāng)波導(dǎo)絲帶動金屬帶扭轉(zhuǎn)時,就會引起線圈內(nèi)磁感應(yīng)量的變化,線圈在旁邊永久磁鐵的磁場作用下就會感應(yīng)出電脈沖即回波信號。
2 硬件實現(xiàn)方案
2.1 元器件選型
2.1.1 單片機選用美國Microchip 公司的工業(yè)級低功耗芯片PIC18(L)F45K22,它具有極強的抗干擾性能,高達16 MIPS 的工作速度,帶有獨立的內(nèi)置看門狗;時鐘頻率可達64 MHz,內(nèi)部有4 倍頻鎖相環(huán)(PLL);16 位定時器/計數(shù)器可以保證時間測量的精度;兩個增強型通用串口(EUSART)模塊;8 x 8 單周期硬件乘法器對于有較多浮點數(shù)計算的代碼,能大幅提升執(zhí)行的效率。
選用有源晶振,它有內(nèi)置振蕩電路,不需要匹配電容,避免了外部電容匹配不好造成頻率偏移的問題,同時也在很大程度上減少了電路板雜散信號對它的干擾,可以達到更高精度與穩(wěn)定性。為提高EMC 性能,晶振頻率選為16 MHz,然后通過MCU 內(nèi)部鎖相環(huán)4 倍頻到64 MHz;軟件對測量數(shù)據(jù)進行取平均值后再平滑濾波,時間的分辨力可以達到1/64 MHz,扭轉(zhuǎn)應(yīng)力波在波導(dǎo)材料中的傳播速度約為2830m/s,那么位移測量值的分辨力可以達到:(2830/64)*10-6m=0.044mm。
2.1.2 脈沖大電流驅(qū)動選用NXP 公司的BST52 達林頓三極管,它的集電極電流(DC)為1A,峰值電流為2A。雖然在設(shè)計的電路中,波導(dǎo)絲中最大電流約為10A,但單片機發(fā)出的是脈沖信號,脈沖的周期是2ms,脈沖寬度為0.5us,所以波導(dǎo)絲中的平均電流只有0.0025A,經(jīng)實際驗證,完全能滿足設(shè)計要求。
2.1.3 拾取回波信號的運放選用AD 公司的低功耗高速運算放大器AD8039,它有低電源電流,1 mA /通道;高速,350 MHz,-3 dB 帶寬;低噪音,8 nV/√Hz @100 kHz,600 fA/√Hz @ 100 kHz;低偏置電流,最大750nA。用2 片AD8039 組成儀表放大器,線圈感應(yīng)信號差分輸入到儀表放大器,提高了輸入阻抗和共模抑制比(CMRR)。由于拾取的信號極其微弱,兩個線圈的感應(yīng)信號設(shè)計成方向相反形成差分信號以提高抗干擾能力,周圍需要屏蔽,并要使線路盡量短的輸入到運算放大器。
2.2 磁致伸縮位移傳感器電路測量控制原理
MCU 發(fā)出激勵脈沖,經(jīng)放大單元放大后驅(qū)動波導(dǎo)絲。回波信號拾取單元拾取信號后再進行放大、整形,輸入到MCU,MCU 對原始數(shù)據(jù)進行處理,把測量結(jié)果以數(shù)字量和模擬量輸出,同時在液晶顯示器上也可以直觀的顯示測量結(jié)果。
傳感器原理框圖如圖1 所示。

圖1 磁致伸縮位移傳感器原理框圖
通過2 個按鍵的組合可以設(shè)置各項參數(shù),如客戶現(xiàn)場端參數(shù):零點和滿度的遷移,輸出方向切換,恢復(fù)出廠設(shè)置等;工廠內(nèi)部端參數(shù)(不對客戶開放):零點和滿度的標(biāo)定,顯示值和輸出值一致性的校準(zhǔn),輸出范圍設(shè)置等。由于加工工藝差異、元器件離散性,甚至不同批次波導(dǎo)絲的性能差異等,都會造成測量誤差,所以專門設(shè)置了調(diào)節(jié)輸出零點和滿度偏移的參數(shù),而不是在硬件電路中通過機械式的電位器調(diào)節(jié),提高了可靠性,這在防護等級要求高、振動比較強的場合,優(yōu)點更加明顯。
傳感器的量程和定時器的時鐘頻率有關(guān),在時鐘頻率為64 MHz 時,量程為2.83m,分辨力為0.044mm;為32 MHz 時,則量程為5.66m,此時分辨力為0.088mm,雖然這時分辨力變大了,但量程也變大了,所以分辨力和精度相對于滿量程的百分比,即分辨率和相對精度還是沒有變化的。根據(jù)需要量程可以達到20m。
磁致伸縮位移傳感器的輸出形式有:4~20mA 或0 ~20mA,0 ~5V 或0 ~10V;以及數(shù)字輸出Modbus RTU,由于省去了把原本就是數(shù)字量的回波時間再轉(zhuǎn)換為模擬量的環(huán)節(jié),數(shù)字輸出的精度要比模擬量輸出的更高。
電源電路設(shè)計了防雷擊、防浪涌、反向、過載、短路等保護。模擬電路和數(shù)字電路分開供電,在PCB 布局布線時,功率、高頻器件和模擬器件要分開放置,在模擬電路區(qū)域單點接地,這些措施都有效地提高了系統(tǒng)的抗干擾能力和可靠性。
2.2.1 MCU 各管腳的分配。根據(jù)EMC 設(shè)計原則,為使與外圍功能單元的傳輸線盡量短,就近分配了MCU各管腳的功能,見圖2。
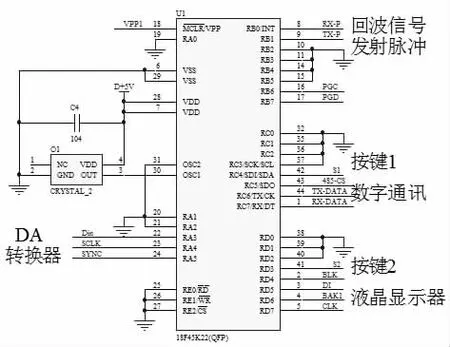
圖2 MCU 管腳分配圖
2.2.2 脈沖驅(qū)動電路。MCU 發(fā)出的激勵脈沖驅(qū)動能力比較弱,需經(jīng)放大單元放大后才能驅(qū)動波導(dǎo)絲。對于小量程的傳感器,由于波導(dǎo)絲的電阻較小,應(yīng)該加一個限流電阻,以防止驅(qū)動電流過大損壞器件,電路見圖3。

圖3 脈沖驅(qū)動電路
2.2.3 回波信號拾取、放大、整形電路。感應(yīng)線圈拾取的差分信號先通過儀表放大器進行放大,然后和設(shè)定的電壓比較以濾除干擾的雜波,提高抗干擾能力,再經(jīng)過整形后輸入到MCU,具體電路見圖4。

圖4 回波信號拾取、放大、整形電路
2.2.4 輸出。傳感器有標(biāo)準(zhǔn)電流、電壓模擬量輸出,和數(shù)字量輸出。數(shù)字量輸出的物理層接口選用RS485 通訊協(xié)議,應(yīng)用層選用Modbus RTU 軟件協(xié)議,它們都是工業(yè)上常用的通訊協(xié)議。
3 軟件實現(xiàn)方案
系統(tǒng)軟件由C 語言編寫,主程序包括測量數(shù)據(jù)處理,刷新模擬量輸出值,刷新顯示值,鍵處理等。發(fā)射脈沖和數(shù)字量輸出都放在低優(yōu)先級中斷里處理,而讀取時間測量值則放在高優(yōu)先級中斷里處理以提高響應(yīng)速度,也即提高測量精度。
對測量數(shù)據(jù)數(shù)組進行抗干擾處理后得到有效測量值,再對有效測量值進行零點和滿度標(biāo)定、顯示值和輸出值一致性校準(zhǔn)、離散性修正等數(shù)據(jù)處理,得到最終的輸出測量值。
在軟件中設(shè)置了多處軟件陷阱,以及多條“NOP()”作為指令冗余,以增強系統(tǒng)的抗干擾能力。
3.1 主程序流程圖見圖5。

圖5 主程序流程圖
3.2 中斷。發(fā)射脈沖的定時器timer0中斷和數(shù)字通訊的串口EUSART1 中斷都是低優(yōu)先級中斷,它們是同一個中斷入口,需要判斷后分別處理。回波脈沖輸入到MCU 的外部中斷引腳INT0,為高優(yōu)先級中斷以提高時間測量的精度,TMR1 為時間測量計數(shù)器,脈沖發(fā)射后即啟動,進入INT0 中斷后可讀取測量值。根據(jù)需要,可以安裝三個磁環(huán),同時測量三個位移量,實現(xiàn)多參數(shù)測量。
4 傳感器測試結(jié)果與分析
在常溫常壓的環(huán)境中對傳感器進行了測試,傳感器量程1000mm,輸出4~20mA,24VDC 供電,數(shù)據(jù)如表1。

表1
從測試數(shù)據(jù)可以得出上行程的最大絕對誤差為0.004mA,對應(yīng)位移測量值的最大絕對誤差為:(0.004/16.001)*1000.00=0.25mm, 則 相 對 誤 差 為:(0.25/1000.00)*100%=0.025%F.S.,即在工程意義上傳感器的上行程相對精度為0.025%F.S.。同樣的可以計算出下行程相對精度為0.031%F.S.(為絕對值,不區(qū)分正負號)。
多組測試數(shù)據(jù)表明,測量值基本上是一條直線,在標(biāo)準(zhǔn)值附近波動,沒有遲滯現(xiàn)象,證明了磁致伸縮的測量原理是完全正確的,并且測量值的精度非常高。對于較大的量程,最大絕對誤差會大一些,但增加的并不多,因而相對誤差即相對精度要比小量程的更優(yōu),即量程越大相對精度越高。
傳感器在滿量程時連續(xù)通電24 小時,測量值的最大波動范圍為±0.002mA,即0.013%F.S.,傳感器的穩(wěn)定性也非常好。設(shè)置溫度試驗箱的溫度范圍為-20~60℃進行溫漂測試,對于模擬量輸出的傳感器,測得零點的溫漂為0.02%F.S./10℃,滿量程的溫漂為0.2%F.S./10℃。對于數(shù)字量輸出的傳感器,測得零點的溫漂為0.01%F.S./10℃,滿量程的溫漂為0.08%F.S./10℃。這顯然是由于省去了把數(shù)字量再轉(zhuǎn)換為模擬量的環(huán)節(jié),減少了元器件數(shù)量和轉(zhuǎn)換誤差,也減少了溫漂,所以數(shù)字量輸出的精度要比模擬量輸出的更高,溫度性能也更優(yōu)。
5 結(jié)論
通過上述設(shè)計和測試結(jié)果可以看到,磁致伸縮位移傳感器有很大的測量范圍,很高的精度,可以同時測量多個磁環(huán)的位置,如果加入溫度傳感器則也可以測量溫度,實現(xiàn)一個傳感器測量多個參數(shù),減小了傳感器尺寸和數(shù)量,簡化了安裝。從測量原理、電路原理、實測結(jié)果來看,數(shù)字量輸出更適合要求精度高、溫漂小的應(yīng)用場合,并且成本還更低。在有些溫度變化比較大的場合,可以在軟件中增加溫度補償以對測量值進行修正,提高測量精度。對于有些要求更小分辨率和更高精度的應(yīng)用,在設(shè)計時可以選擇專用的時間間隔測量芯片來實現(xiàn),同時選用溫補有源晶振以保證傳感器的性能。所以磁致伸縮傳感器能在各種惡劣的工業(yè)環(huán)境中完成位移、液位、溫度等過程參數(shù)的一體化精確測量,是自動化測控系統(tǒng)中非常好的解決方案。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00