基于多源數據融合的礦山大比例尺地形圖測繪方法研究
2022-06-24 11:33:14田露
世界有色金屬 2022年7期
關鍵詞:礦山
礦山地形圖測繪是礦山工程建設和資源勘查過程中必不可少的重要工作,傳統的大比例尺地形圖測繪具有人工采集數據繁瑣、外業工作量大、人力和物力資源投入大、受限制條件多、成本高和作業周期長的弊端,且所獲數據格式不統一,導致地形圖的成圖效果低,嚴重的限制了礦山工程快速建設的基本需求,同時傳統的地形圖測繪對后期數據庫的綜合入庫等影響較大
。
針對上述問題,本文介紹了基于多源數據融合的方法某礦山大比例尺地形圖測繪中的應用,為快速獲取礦山大比例尺地形圖提供參考。
1 技術流程
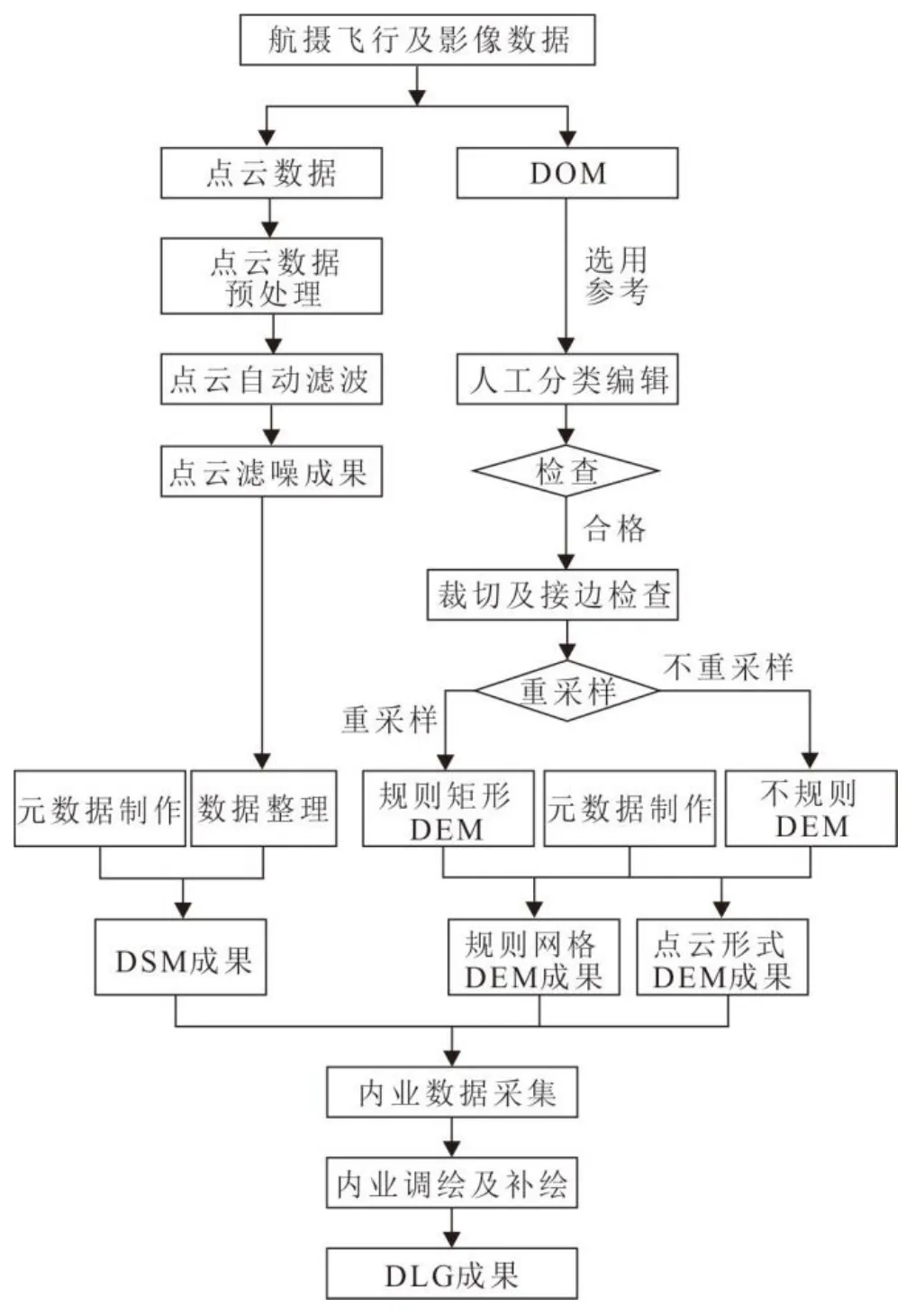
多源數據融合方法在礦山大比例尺地形圖測繪中的應用主要流程見圖1所示。在獲取研究區具體位置的基礎上,選擇地面控制點及靜態GPS聯測等工作,并編制相應的航飛計劃,選擇良好天氣條件下進行航空拍攝,采集LiDAR數據。每次飛行所獲影像數據應及時檢查,對出現漏飛、影像數據質量差的區域需要進行補飛或者重飛處理。航飛結束后,應立即對所獲點云數據以及POS數據等核查,若數據無誤,則可采用IMU、GPS聯合解算,最終得到可進一步處理的點云數據和DOM數據等。
2 主要操作方法
2.1 點云數據預處理
點云數據是生產數字線劃圖的基礎,其預處理過程對提高地形圖精度具有明顯的影響。點云數據的預處理一般按照點云分揀等將冗余的數據剔除,如噪音點、飛點以及低點
。由于本次航飛是根據不同的航帶執行飛行任務,當點云數據重疊概率超過百分之三十,出現了一定數量的重復數據,且該類型的數據精度相對較低。此時,為了消除航帶重疊區冗余數據對精度的影響等,需要進行點云數據的預處理,將費地面點等按照統一格式分類,能夠有效地的降低對正常數據的干擾。
所以,處理點云數據的目標是將采集文件進行有效分類,也是消除冗余數據的主要措施。
2.2 點云自動濾波
此時,需要通過一定的算法將噪聲點去除,才能獲得更高精度的地形圖。點云數據的去噪處理方法主要包括:①可采用剔除低點、飛點等方法將點云數據中的大多數噪聲點剔除;②運用人機交互的方式去除點云數據中的噪聲點
。
此外,DEM產品生產之前需要對點云數據進行檢查,上述操作是在點云數據無誤的基礎上進行操作。同時,由于在獲取點云過程中所測繪的面積往往比實際面積較大,故要先進行裁切及裁邊檢查,合格后才可生產規則的DEM產品。
根據上文的描述可知,點云自動濾波應加強以下幾個方面的工作:①如下工作內容:數據自動分類精準但出現了點云數據低于周圍地物平均高程點數值,多見于比較狹窄或者地物面積小的區域,由于反射點數量少且分布不均勻,故在處理過程中應按照地物中心點高程與周邊其它點高程值比較,若明顯低于其它地物點,則將該點分離出去;②分離空中點(是指高程明顯低于周邊平均高程,且在地面以上的點),若在搜索周邊一定半徑范圍內的點云數據時,部分點的平均高程明顯高于周邊其它點云數據,且與平均高程值之間的差大于給定的閾值時,可將其作為空中點從點云數據中剔除,如塔尖、草垛等;③分離地面點,按照三角網TIN模型迭代分類算法將地面點分離出來。
2.3 點云數據去噪處理
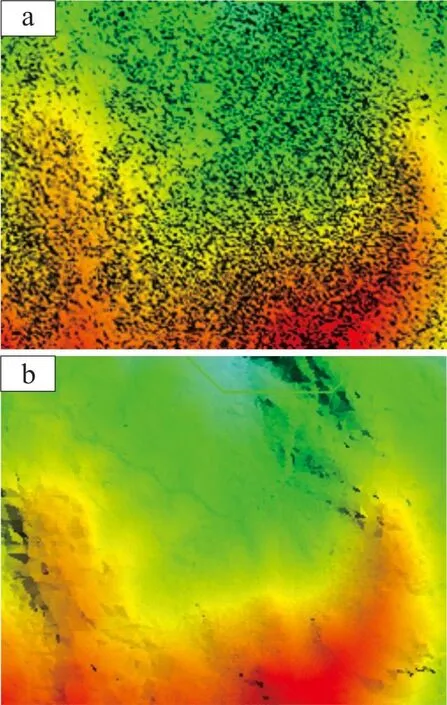
點云數據劃分主要是以生成數字表面模型為標準。將冗余及噪聲的數據篩選出后,剩下的點云數據可直接生成DSM,而數字高程模型(DEM)是在DSM的基礎上提出了非地面點而生成的模型,該類非地面點主要包括水域點云、建筑物點云、架空橋梁點云等。由上可知,在對點云數據進行分類劃分時要重點關注以下幾點:①將與地面點相互連接的道路、水系以及臺階等地物保留;②將明顯高于地面點的高塔、建筑物以及架空橋梁等從地面點中剔除;③將面積較大的水域,一般置平處理;④若所獲DEM產品的網格大于地物尺寸時,可將該地物忽略。如礦山生活區臨近河道的DEM產品(圖3)。
將點云數據進行劃分過程也可稱之為點云數據自動濾波,工作原理為依照相關參照物體的形狀特征、反射強度、回波次數等,運用算法計算各地物點的數據自動提取過程,主要依據有:①裸露基巖僅有一次回波,其反射點就是地面點;②植被發育區域因遮擋等造成多次回波,故一般情況下最后一次回波的反射點應為正常的地面點。所以,可以斷定點云數據的劃分主要是依據回波特征,計算出地物坡面閾值,直至獲取正常的地面點為止。
2.4 點云數據劃分
點云數據在預處理和自動濾波處理后雖然顯著的減少了點云數據中的冗余數據,如重復數據、飛點和噪聲點等。但是,由于點云數據獲取過程中形成的多源融合數據仍然具有不同成因的噪聲點,且該類噪聲點多與設備的系統誤差以及被測地物的物理性質等密切相關。
2.5 DEM成果
按照Churchill開發新量表的程序,本研究在系統梳理相關經典文獻的基礎上,分析、界定了高校創新能力的內涵與外延,構建了高校創新能力的題項池。[13]本文首先使用SPSS軟件對81份調查問卷中的創新能力測量題項進行了探索性因子分析,見表1。其中,因子提取方法是主成分分析法,旋轉方法為方差最大法,最終析出了5個因子。所有題項的累計方差貢獻率是68.5%,每個題項的相應因子載荷均大于0.5的閾值,且交叉載荷不顯著,本測量模型中5因子結構的高校創新能力與理論模型相吻合。
DEM成果的制作是快速獲取數字線劃圖(DLG)的基礎。因此,制作DEM產品是礦山大比例尺地形圖測繪的主要過程之一。因此,生成數字高程模型(DEM)是至關重要的。DEM生成過程中所需要的點云數據主要包括兩部分內容,一是地面點數據,二是斷裂線數據。上述兩種點云數據在點云數據自動分類和人工精細分類過程中均以Ground類點云和斷裂輔助線數據分別存儲,故在生產DEM產品過程中僅需要提取Ground類點云和斷裂輔助線數據兩個文件就可自動生成,其方法有兩個:一是在Ground類點云輸出中選擇點云形成數字高程模型,二是在LiDAR-DP軟件中有效運用斷裂線輔助數據,設定分類間隔為兩米距離網格點云數據。
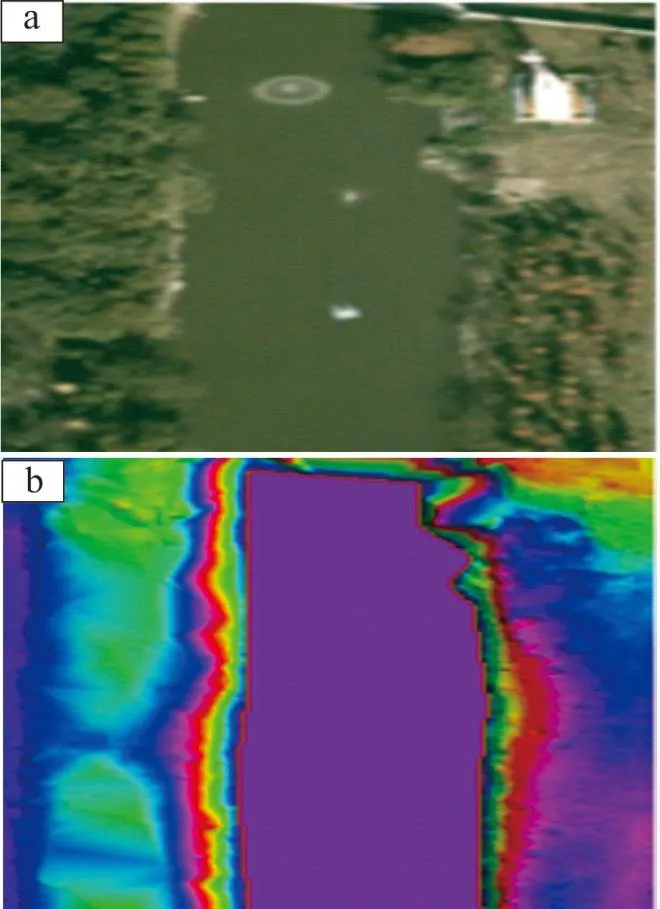
在完成上述操作的基礎上,就可進行內業數據的采集操作,是生產大比例尺地形圖的最后環節,也是形成地形圖成果的重要部分。內業數據的采集包括自動數據采集和手動數據采集,前者是將點云數據導入至相應的軟件系統中,按照地形圖編輯要素,可自動生成初始的數字線劃圖(DLG)(圖4)。同時,等高距的大小應根據輸出比例尺要求做適當調整,以盡可能反映地形的微地貌為基本原則。在數字線劃圖生成之后,需要采集地理注記點等信息,此時可以初步以自動數據采集方式生成注記點,再通過手動數據采集功能調整注記點的密度,以能夠滿足地形圖順利閱讀和確保注記點布局合理為宜,即地形圖中的注記點不宜過于稀疏也不宜過于稠密。
在鼻胃鏡可通過狹窄病變的病例中,利用鼻胃鏡成功輔助完成46例消化道狹窄內鏡下治療,成功率100%。在食管癌中,行16例支架置入/調整術,2例光動力治療;食管術后吻合口狹窄中,行5例支架置入術,2例吻合口狹窄擴張術,1例引流管置入術,1例光動力治療術;食管外壓性狹窄中,行1例支架置入術;食管不明原因性狹窄中,行1例擴張術。胃癌中,行7例支架置入術,1例腸梗阻導管置入術;胃術后吻合口狹窄中,行2例支架置入術,1例營養管置入術。結直腸癌中,行4例支架置入術,2例腸梗阻導管置入術(表6)。
2.6 內業數據采集
對于方言的定義,有研究者提出這樣一個政治檢驗標準:語言是官方確定的全國通用語,而方言則不是。這一檢驗標準排斥了屬于語言范疇的語言。按照這一說法,少數民族的語言可能得不到官方的承認,如果因此就把屬于不同語系的一種語言看成是方言,那是滑稽可笑的。
此外,若點云數據局部區域數據較少,可以通過補測或者重測進行解決,以滿足大比例尺地形圖精度要求為主。在完成上述操作的基礎上,對數字線劃圖進行編輯加工,制作圖名、圖框、圖例等必要要素,同時整飾圖面,就可提交最終的成果文件,即礦山大比例尺地形圖。
從廣州出發飛 行了16個小時,再坐上2小時的大巴,穿越一片片平坦開闊的葡萄園、橄欖園,路過一棟棟白色或淺黃色的石屋,終于抵達普利亞產區的中心城市:曼杜里亞。此時接近正午,陽光正好,清勁的海風撲面而來,一下子驅散了長途旅行的不適。空氣中彌漫著橄欖香、泥土香,暖暖的,非常愜意。放眼望去,都是狹窄的石頭街道、古老的石頭房子和教堂,街上行人寥寥。
無菌環境下,采集患病雞的少量新鮮糞便,放置在載玻片上,滴加1滴生理鹽水,混合均勻后蓋上蓋玻片,在低倍顯微鏡下觀察,可觀察到呈現卵圓形的球蟲卵囊。采集上述病死雞典型病變腸道組織,輕輕刮取病變較為明顯的腸道黏膜表層物放置在載玻片上,加同等量的甘油和生理鹽水混合物,蓋上蓋玻片后,在低倍顯微鏡下觀察,發現存在圓形的裂殖體和裂殖子[2]。無菌環境下采集患病雞排出的新鮮糞便10 g,用10倍飽和食鹽水稀釋,充分混合后,靜置30 min,用玻璃棒蘸取表面液膜,抖落在載玻片上,在低倍顯微鏡下觀察,可以發現有卵圓形的球蟲卵囊存在。
3 測量精度對比
為了分析多元數據融合方法在大比例尺地形圖制作中的精度,隨著的獲取了5個點的全站儀測量數據和該5點處周邊點云數據的平均值,其結果見表1。由表1可知:使用多元數據融合方法所點的三維坐標與全站儀所測的三維坐標基本一致,其精度完全滿足1/2000大比例尺地形圖測量的精度要求,說明多元數據融合方法能夠滿足礦山大比例尺地形圖測量的需求。

4 結語
綜上所述,多元數據融合方法是在礦山大比例尺地形測圖中具有明顯的應用優勢,不僅所獲的地形圖精度高,能夠滿足礦山應用實際需要,而且具有成圖快、周期短、成本低和效率高等優勢,同時在數據庫建設方面比傳統測量方法更具優勢。因此,該技術可以在相似礦山生產中應用。
[1]于笑雨.基于機載LiDAR數據的DEM獲取和精度影響因素分析——以沈陽攝區為例[J].城市勘測,2021(06):95-99.
[2]黃妙華.基于多源數據融合的大比例尺地形圖制作方法研究[J].智能城市,2021,7(11):55-56.
[3]李雪健,張潤廷,杜勇志,田羽.無人機機載LIDAR系統在高寒露天煤礦測量驗收中的應用[J].內蒙古科技與經濟,2020(21):97-100.
猜你喜歡
資源節約與環保(2022年8期)2022-09-20 02:24:38
現代礦業(2021年12期)2022-01-17 07:30:32
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
石材(2020年11期)2021-01-08 09:21:48
礦產勘查(2020年7期)2020-12-25 02:43:42
陽光(2020年6期)2020-06-01 07:48:36
當代工人·精品C(2020年1期)2020-05-20 07:54:37
建材發展導向(2019年11期)2019-08-24 06:35:46