基于單片機的鐵路道口報警系統設計
2022-06-23 11:01:54孫鵬宇魏立明何佳旺
北方建筑 2022年2期
孫鵬宇,魏立明,何佳旺
(吉林建筑大學電氣與計算機學院,吉林 長春 130118)
0 引言
伴隨著科技的發展、生活節奏速度的加快,快速便捷的交通能力不斷提高,現代交通運輸在生活中扮演的角色越來越重要。尤其是在鐵路部門,其運輸與水路、公路與航空等部門相比,不僅方便快捷,且全天運營、容量大,并有著較低的運輸成本。因此,鐵路運輸作為一種安全、快速的運輸方式受到大眾的青睞。然而,需要注意的是,如果忽視了鐵路的安全保障工作,來往的車輛、行人可能與行駛中的列車發生交通事故,會對人們的生命和財產安全造成重大的損失。因此,行人、汽車、列車應有序通行,進行安全預防工作尤為重要。鐵路平交道口,實際上是公路和鐵路的匯合點。因此,往來的車輛、行人很容易與行駛中的火車發生碰撞,因此必須讓火車、汽車、行人和其他交通工具有條不紊地參與到交通行為中,以確保生命和財產的安全,交通暢順。
1 系統簡介及工作原理
1.1 系統簡介
整個系統的設計過程可以根據預先計算出的距離在鐵路軌道的特定位置處安裝傳感器。如果列車將要經過路口,需要提前60 s~100 s發出聲、光的預報警信號,可以在列車到達之前發出警報信號。能夠提醒車輛和行人,保障他們的安全。為起到警示作用,一般將信號設計成雙光模式[1]。比如,綠燈狀態下代表沒有車輛接近,交叉路口通常是打開的,可以通行。紅燈狀態代表有車輛正在接近,此時禁止行人通行與車輛過往。這樣既便于控制交叉口的開啟,也方便鐵路道口的管理,并且可以快速有效地確保人員的安全。系統組成如圖1所示。
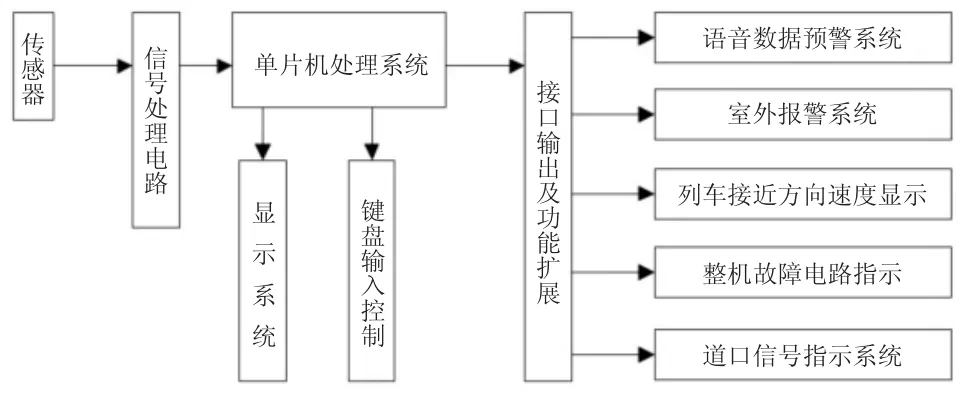
圖1 系統組成框圖
1.2 系統的工作狀態
整體設計過程中力求節約資源、行之有效。作為重中之重的傳感器系統,當交叉口房間的上位機系統檢測到外來信號傳入時,工作人員能夠接收到接近車輛的信息,從而實現自動報警功能,如圖2所示。
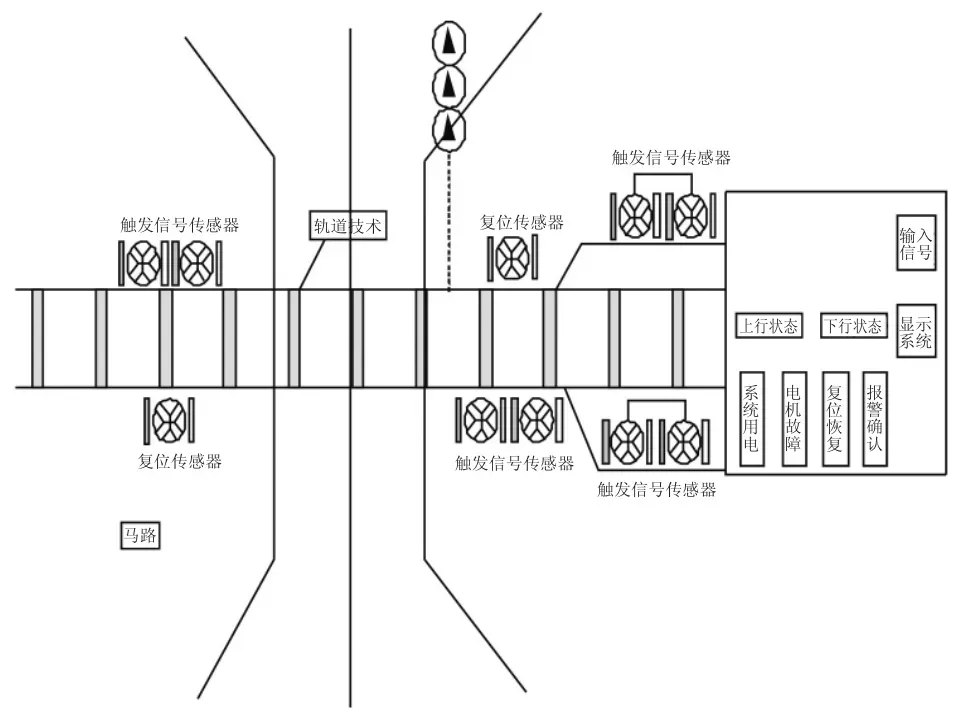
圖2 系統工作的狀態示意圖
在整個系統工作流程中,需要預先設計好基本圖紙、明確各部分的功能,以及對應信息的儲存位置。在這里,要考慮鐵軌上傳感器部分,需要將系統主機安裝在房間里,注意傳感器與系統主機之間的距離。
1.3 系統的技術指標
本系統涉及的技術指標見表1。
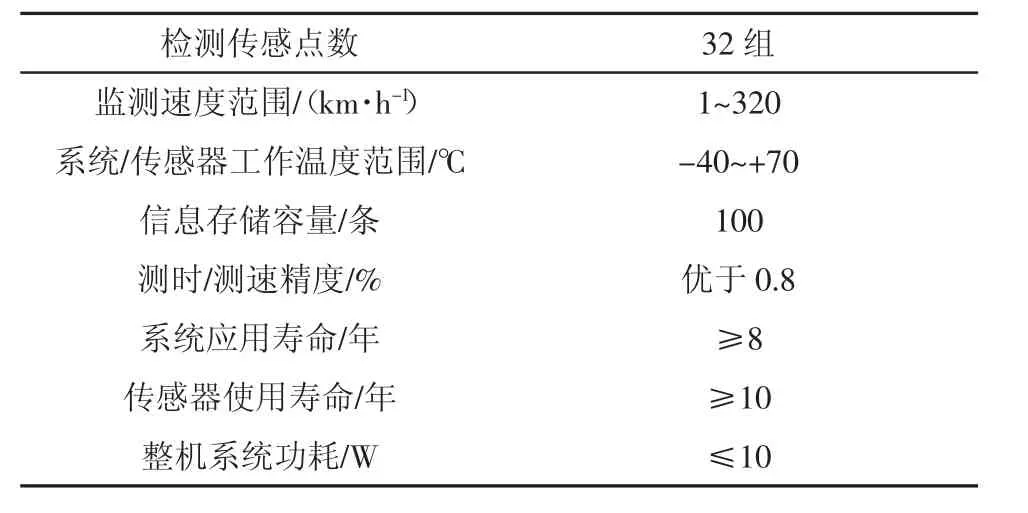
表1 系統的技術指標
當列車以某一指定速度經過傳感器時,在傳感器處會產生1個一定強度的脈沖信號,在示波器處會產生2個固定頻率的輸出波形。等列車通過后,在相反的軌道上重復此過程。實驗結果如圖3~圖4所示。
從圖3~圖4中可以發現,本文的設計結構能夠達到預期的效果。在后期施工過程中,系統可以自由切換方式來選擇報警的方向。
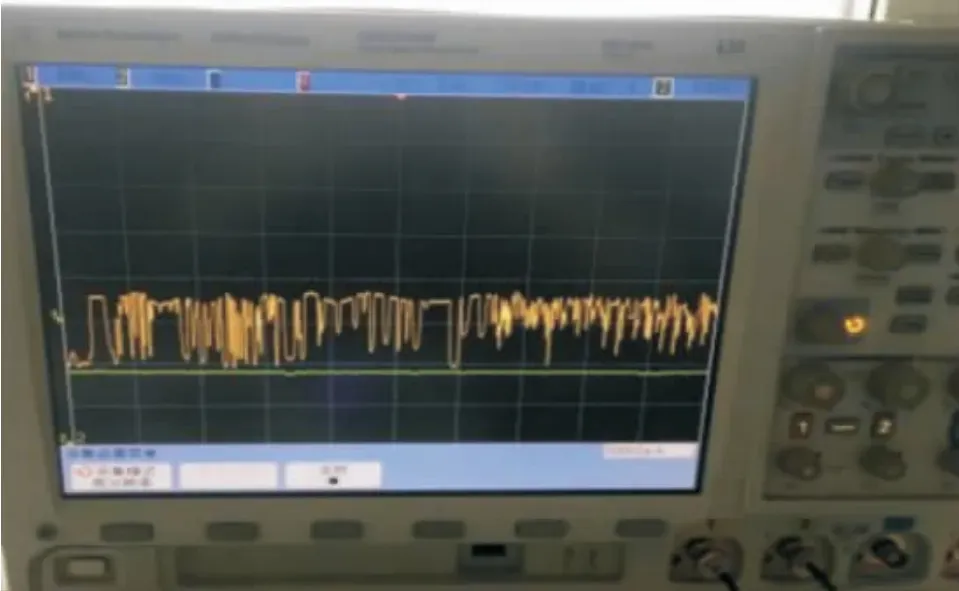
圖3 左側軌道傳感器脈沖圖
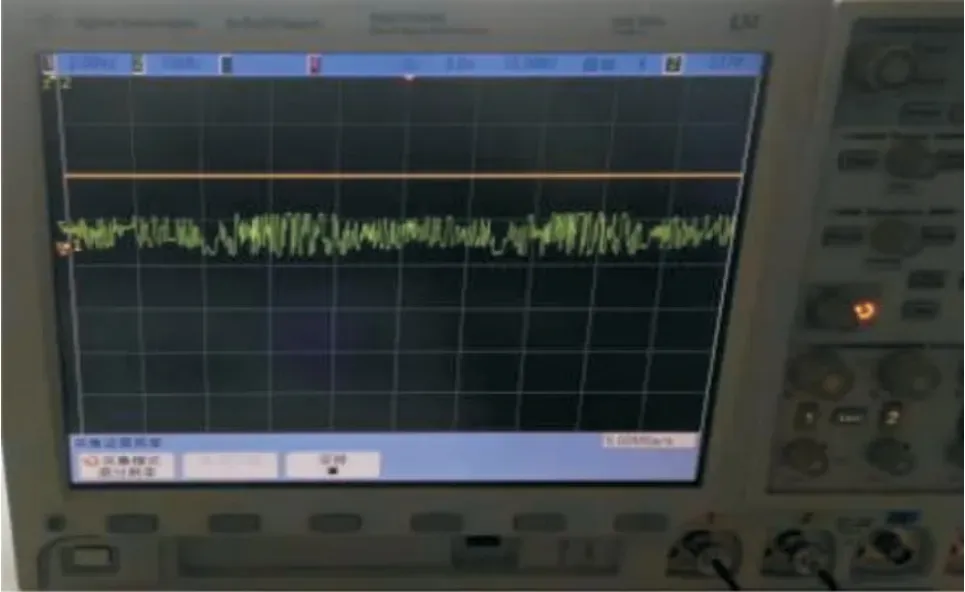
圖4 右側軌道傳感器脈沖圖
2 系統硬件設計
2.1 傳感器選擇依據
本設計過程中所選用凸極磁電跟蹤傳感器,傳輸速度快,信號轉換效率高,供電電壓是12 V,輸出信號是電壓。一般軌道傳感器多采用速度信號,傳輸速度慢,信號可靠性低,而且在取樣速度比較快的同時會容易產生多余的輸出信號,這樣就可能會大大降低系統的信號精準分辨率和信號靈敏度[2]。此傳感器能夠改善一般軌道傳感器中存在的信號在傳播中斷時的中斷現象;而且在遭遇極端天氣時,能夠避免出現像傳統傳感器的信號輸出效率低下,及傳感器的內部結構受損現象。在傳統軌道傳感器的設計基礎上,需要進一步完善和優化,使該傳感器能夠完善其余各類傳統軌道傳感器存在的缺陷。而磁電式傳感器的磁極為一個凸出極式磁電結構,且磁極中心底部設有半密封極結構凸極磁鐵芯。且具有良好的防風雨雷電檢測性能和比較高的信號靈敏度,即使在遭遇風雨雷電等各種惡劣條件下,也依然能非常精準、準時地高速輸出有效信號。傳感器的工作原理主要有以下2點。
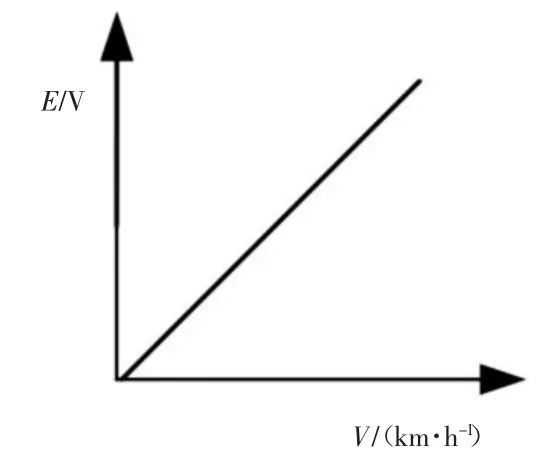
圖5 電壓與速度的關系
2)感應信號電壓E和工作間距H的變化趨勢如圖6所示。

圖6 感生信號電壓與工作間隙的關系
2.2 傳感器安裝及使用方法
為確保整個系統能夠安全準確地運行,不僅在傳感器選擇上具有嚴格的標準,對于傳感器的安裝和使用方法也要有嚴格的要求。因為如果在安裝位置上出現問題,將很有可能影響到最終的檢測結果,甚至造成不必要的危險和傷亡[3]。所以,為保證傳感器能安全穩定工作,結合傳感器自身及鐵路的實際情況,其安裝過程應考慮以下幾個因素。
首先,車輛踏面允許的最大范圍應為9 mm,達此限度的車輪踏面將不可以再使用;其次,車輛輪沿高度25 mm,機車輪沿高度為28 mm。在實際設計和應用過程中,需要考慮的是:傳感器應用必須安全無風險、無不良后果。且滿足信息傳輸效率和準確率達到一定標準等相關因素。系統在設計過程中應使傳感器面距離鐵軌面的高度為37 mm;在沒有機動車輛及重型車輛行走的情況下,此高度可調整為34 mm。
傳感器的具體安裝:由于整個系統硬件電路主要是由單片機控制實現的。而單片機系統則需由觸發信號算出火車的行駛速度,所以結合物理知識,為了便于測量和計算,將觸發端設計成2個傳感器并排放置的形式。可以設定2個傳感器之間的距離長度為s,并由2個脈沖之間的間隔便可借助軟件計算出速度。設系統檢測到車輪通過2個傳感器所用時間為t,則列車接近速度為v=s/t。
當火車已到達道口后,系統不需要繼續發出警報,只需在道口安裝一個復原端傳感器即可。本系統采用一只磁電式傳感器便可實現。火車到道口,即通過傳感器給系統1個脈沖信號,系統收到信號,即可停止警告,與此同時,完成了整個過程。傳感器設計和安裝部分基本完成。觸發、復原傳感器如圖7~圖8所示。

圖7 觸發傳感器實物照片

圖8 復原傳感器實物照片
2.3 信號處理電路設計
在系統的運行處理過程中,此時若有一班列車再次靠近并經過列車傳感器時,傳感器中所傳遞的信號往往不是單一的列車信號,可能只是混雜了具有干擾性的信息。只有對其中有用信息信號篩選處理,才能夠使其供正常應用程序模塊使用,否則系統會有礙于下一步的運行。系統信號處理電路的執行功能有以下幾點:①分離組合信號,形成脈沖信號;②準時地對車輪信號中所包含的一系列抖動干擾信號作出有效的濾波;③分離出復合信號中包含的故障信號;④對復合模擬信號中有用的車輪信號進行分離處理,并將其整合為脈沖信號;⑤為了便于對設備的維護,應當配置1個處理電路的自檢和控制裝置及1個信號顯示器[4]。
每個信號的接口通道的組成分為:中斷控制邏輯、信號調節電平、光電隔離電平、鎖存門電平和信號輸入電平。凸極磁電跟蹤傳感器的輸出:9管腳;輸出信號:15管腳、16管腳。信號處理電路圖如圖9所示。
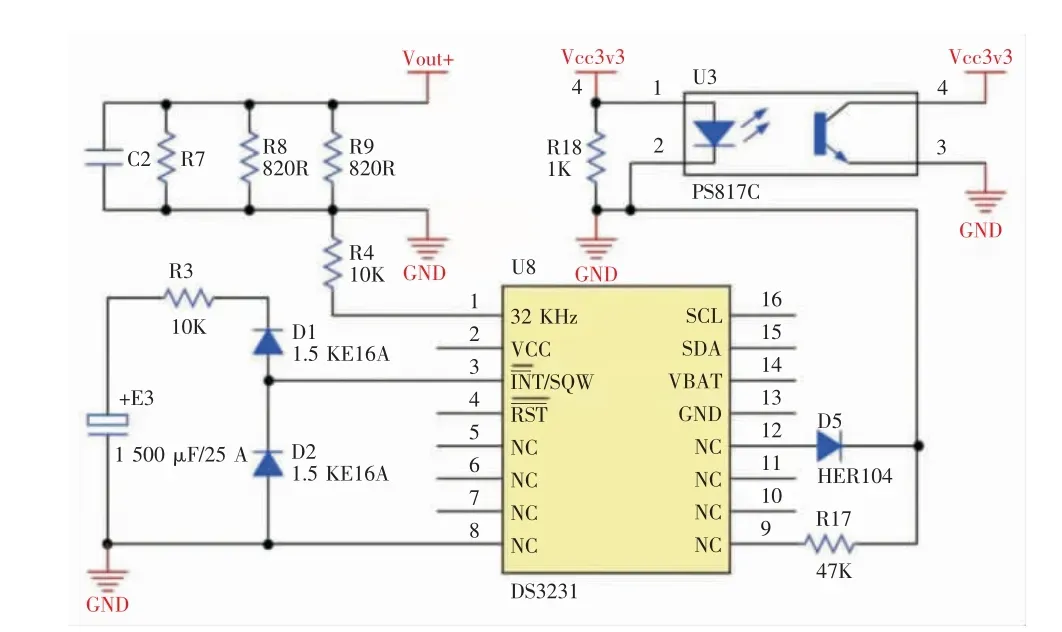
圖9 信號處理電路圖
2.4 系統主電路設計
ARM芯片作為目前主流的嵌入式系統芯片,運算速度快、信號轉化效率高。其核心分為14個系列,可細分為100種子系列。作為列車終端的主控芯片,一般需要考慮以下幾個方面:①芯片的運行速度;②主控芯片與模塊硬件的接口。綜合考慮上述2個方面,列車運輸終端的主控制器芯片主要設計主要采用STM32F103臂式意法半導體芯片,該芯片信號處理速度快,運行時間短,價格便宜,且開發周期短。
3 系統軟件設計
3.1 設計思路
為了使整體設計思路更加清晰明了,軟件設計過程大致包括4個部分:①軟件設備的初始化;②設備自我檢測及斷線檢測;③接入鍵盤管理;④列車接近時,報警系統的自我檢測。
3.2 列車通過復原流程設計
在系統設計過程中,要求在列車完全通過軌道交叉道口后,各個部分的設備需要重新恢復正常工作狀態。當兩列快速列車同時或間斷通過時,由4#和5#兩個列車檢測點檢測并駛向鐵路的交叉口,列車過后,4#和5#兩個檢查站同時恢復列車警報。同時,4#也可能需要負責同時恢復1#點和檢測點的相關報警控制信號。到目前為止,只有整個報警系統正式完成報警功能。十字路口的邏輯框圖見圖10所示。
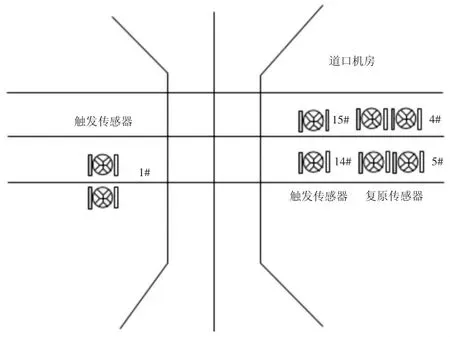
圖10 道口平面邏輯圖
由于1#,5#兩個實時檢測點不能同時連接檢測一輛來車,所以將這兩個點均重新定義以作為能連接到檢測來車的實時報警點。圖11中14#點分別定義了作為一輛列車接收到兩個信號同時報警的兩個復原對等點,4#點被分別定義為1輛發車同時接受2次報警的2個復原對等點,15#點分別定義了作為1輛發車同時接受2次報警的2個復原對等點[5]。為完整數據恢復,重新定義每個檢查點的原因是4#,5#,14#,15#為檢查點內的范圍。14#是觸發傳感器,檢測到列車觸發為1#,按流程圖向下進行;工作標,是判斷確認,同時檢測到為1#,執行對應操作,如圖11所示。
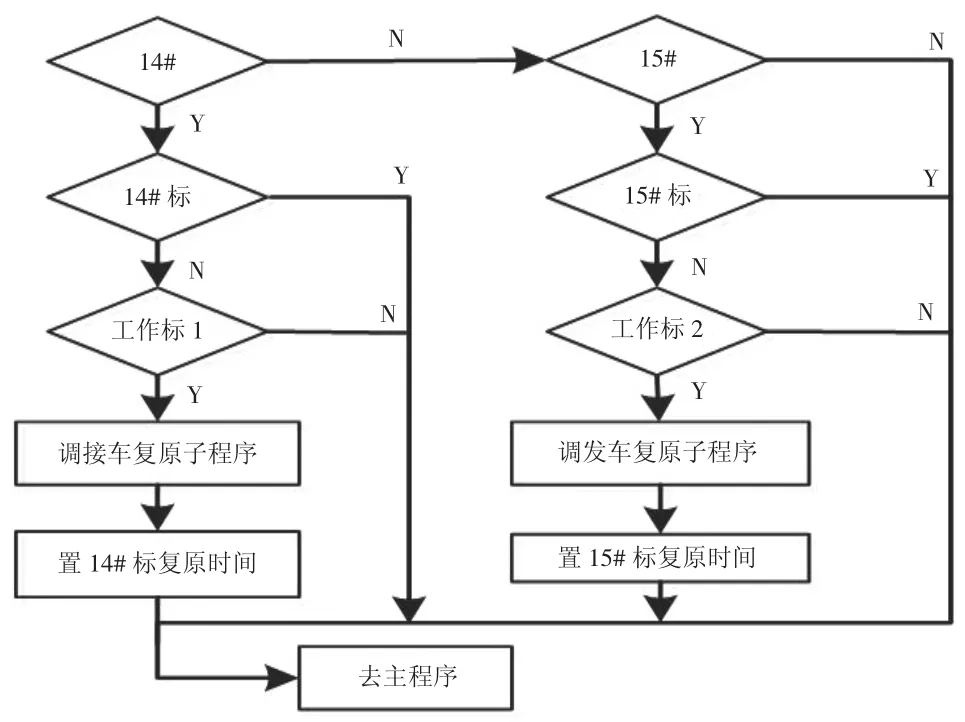
圖11 軟件復原流程圖
4 系統調試
4.1 實驗系統驗證調試
為了使該系統在現場完成安裝之后能夠穩定地運行,需要做到在模擬仿真或者到現場進行安裝調試之前,在實驗室里對該系統進行大量的測試準備。為了檢測到模擬列車通過時由于車輪傳感器向其發出的脈沖信號,需要針對各個道口所有車輛通過的實際路段線和信號采樣地點的差異,研發出一種新型的模擬信號控制板和試驗模塊,信號處理模塊采用的是HJR101-模擬信號控制板,如圖12~圖13所示。
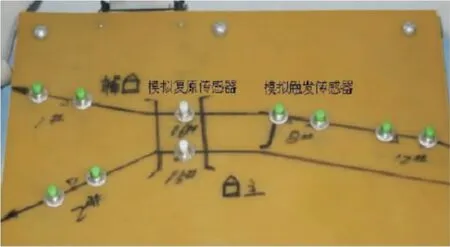
圖12 信號實驗板

圖13 控制板電路
4.2 系統模擬運行
在進行實驗的整個過程中,將看到模擬觸發脈沖傳感器的1個控制按鍵被自動關閉后,就可能會向控制系統內部發出1個模擬脈沖控制信號。所以每次按下1個模仿火車軌道傳感器的按鈕,系統就會自動使得火車上只有經過了1個模擬線路復原后的傳感器,系統自動模擬,并停止向列車發送報警信號。設置后可以顯示當時的時間,相當于數字鐘的功能,如圖14所示,系統實驗電路如圖15所示。
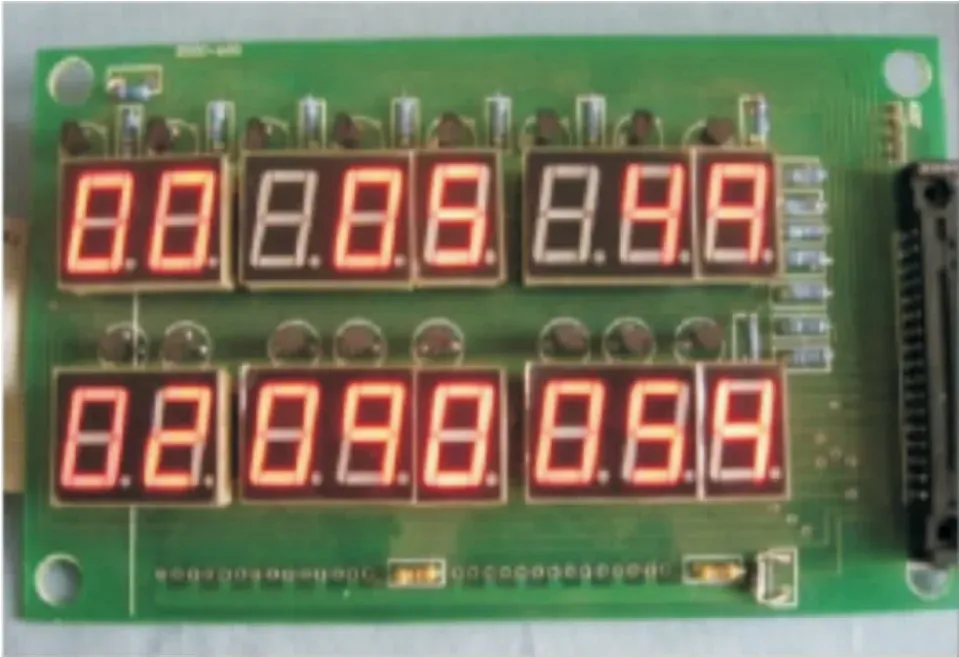
圖14 數字顯示

圖15 系統實驗電路
圖14中上排的00:05:49,表示開機5 min49 s;下排的02:098:054,表示第二道來車,來車速度98 km/h,經54 s到達道口。
5 結論
本設計能夠很好與鐵路道口的視頻監控系統相結合,充分發揮視頻監控的針對性和實用性。將該系統與鐵路道口的電網連接,實現來車報警與道口關閉2種功能之間的完美結合。特別是在某些大霧等低能見度天氣情況下,能充分體現出該系統的優點,減少某些交通事故的發生,是保障鐵路運營和車輛、行人基本安全的有效措施。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
