一種防彎道側翻的智能移動機器人設計
2022-06-23 10:11:50周明龍程晶晶
綠色科技 2022年10期
周明龍,程晶晶
(安徽機電職業技術學院,安徽 蕪湖 241000)
1 引言
智能移動機器人可以通過傳感器實現自動移動功能,能夠替代人力進行危險或惡劣環境下的作業,不僅能夠實現在高輻射高污染環境下的移動,還可以承受人體無法搬運的貨物重量,其在工業、農業和服務行業等領域廣泛應用[1,2]。
通常智能移動機器人在作為貨物搬運使用時,往往會一次性搬運體積和重量較大的貨物,而在智能移動機器人行駛進入彎道時,若運載的貨物碼放位置較高,容易因轉彎導致貨物重心不穩,使機器人側翻,造成設備和貨物的損壞。目前使用的智能移動機器人無法對較重貨物的托載平臺進行調控,貨物會隨機器人彎道行駛時的重心方向傾斜,不利于有效地實現對貨物的運輸,針對上述問題,急需在原有的智能移動機器人的基礎上進行創新設計。
2 防彎道側翻的智能移動機器人的技術方案
設計的防彎道側翻的智能移動機器人,可以用來解決彎道側翻的問題。一種防彎道側翻的智能移動機器人包括:感應探頭,其設置在機器人本體前側面上,且感應探頭和機器人本體之間安裝有中控器;中軸桿,其連接在機器人本體之間,中軸桿與車輪之間連接有車軸桿,并且中軸桿之間上設置有主橫桿;置物臺,其設置在機器人本體頂面上,且置物臺兩側底部還連接有承載架和緩沖架。上述結構的設置使裝置能夠自動監測并感應行駛路徑,并在感應到機器人需要進行轉彎時,通過中控器實現自動減速,同時能保持裝載貨物的置物臺的水平穩定,進而保持貨物擺放位置的穩固,以避免在彎道行駛時貨物重心偏移而產生的側翻[3,4]。
設計的防彎道側翻的智能移動機器人的中軸桿與機器人本體固定連接,中軸桿與車軸桿呈大傾角夾角狀結構,且車軸桿與車輪轉動連接,同時車輪呈前寬后窄的結構,此結構能夠保持機器人行駛時的平穩。主橫桿與中軸桿在同一水平面上處于垂直連接關系,且中軸桿關于機器人本體中心對稱的設置有2組,中軸桿中部位置還設置有環形組件,組成轉動結構,使機器人的載貨支撐結構更加穩固,也便于對貨架的調節。環形組件上轉動設置有支撐架,支撐架頂部設置升降桿,且升降桿上水平連接著固定桿,此結構設置使固定桿組成的置物支撐結構能免受車輪移動的顛簸影響,并保持置物結構與地面處于水平位置關系。固定桿兩側對稱設置感應臺,且感應臺上還對稱設有側卡槽,側卡槽與固定桿之間設置彈簧桿,此置物結構能夠有效承載較重貨物的壓力,并緩和對置物架造成的沖擊力,能實現對機器人兩側重心的實時監測。彈簧桿與固定桿在側卡槽內組成彈性結構,彈簧桿在側卡槽內呈豎直連接結構,且固定桿與置物臺通過螺栓組成固定結構,保持置物臺的穩定,使機器人的置物臺能安全裝載重量較重的貨物,從而減緩對機器人的磨損以延長使用壽命[5,6]。置物臺呈鏤空狀的長方形結構,且置物臺與承載架轉動連接,承載架為不銹鋼材質,此結構的設置使機器人整體結構輕便穩固,并能便于調節置物臺的重心位置。承載架與緩沖架在置物臺底部呈交錯連接結構,承載架、緩沖架分別與置物臺和感應臺形成三角形結構,且置物臺通過緩沖架與感應臺形成彈性結構,上述結構的設置使承載架與緩沖架能穩固支撐和保護置物臺兩側,夠通過感應臺內置的重心感應器控制承載架與置物臺連接角度的調整,以保持置物臺的水平穩定[7,8]。
3 防彎道側翻的智能移動機器人實施說明
一種可防止彎道側翻的智能移動機器人的結構如圖1~5所示,圖1~5中:1、機器人本體;2、感應探頭;3、中控器;4、車輪;5、中軸桿;6、車軸桿;7、主橫桿;8、環形組件;9、支撐架;10、升降桿;11、固定桿;12、感應臺;13、側卡槽;14、彈簧桿;15、置物臺;16、承載架;17、緩沖架。如圖1所示,一種可防止彎道側翻的智能移動機器人,包括:感應探頭2,其設置在機器人本體1前側面上,且感應探頭2和機器人本體1之間安裝有中控器3,中軸桿5,其連接在機器人本體1之間,且中軸桿5與車輪4之間連接有車軸桿6,并且中軸桿5之間上設置有主橫桿7,置物臺15,其設置在機器人本體1頂面上,且置物臺15兩側底部還連接有承載架16和緩沖架17[3,9]。

圖1 智能移動機器人立體結構示意
如圖2所示,在使用該裝置時,首先當機器人行駛至轉彎處時,機器人本體1正前方的感應探頭2監測到路面信息而傳遞至中控器3,此時機器人通過中軸桿5、車輪4和車軸桿6之間組成的穩定結構保持機器人轉彎時支撐整體結構的穩定,而轉彎過程中,通過主橫桿7穩定連接在機器人上的置物臺15受到貨物重心偏移的影響,導致置物臺15平面歪斜,此時承載架16在置物臺15清洗的一側轉動,并壓縮另一側緩沖架17使置物臺15保持與地面水平。根據圖2和圖3所示,彈簧桿14與固定桿11在側卡槽13內組成彈性結構,且彈簧桿14在側卡槽13內呈豎直連接結構,并且固定桿11與置物臺15通過螺栓組成固定結構,當較重貨物擺放在置物臺15上時,對置物臺15施加的壓力會受到彈簧桿14的壓縮緩沖,從而減少對機器人的磨損,以便于保持置物臺15的穩固;置物臺15呈鏤空狀的長方形結構,且置物臺15與承載架16轉動連接,并且承載架16為不銹鋼材質,當貨物擺放在置物臺15上時,受到兩側承載架16的支撐而與地面保持水平位置,同時承載架16的不銹鋼材質能夠保護機器人長期搬運貨物的磨損。

圖2 智能移動機器人置物臺立體結構示意
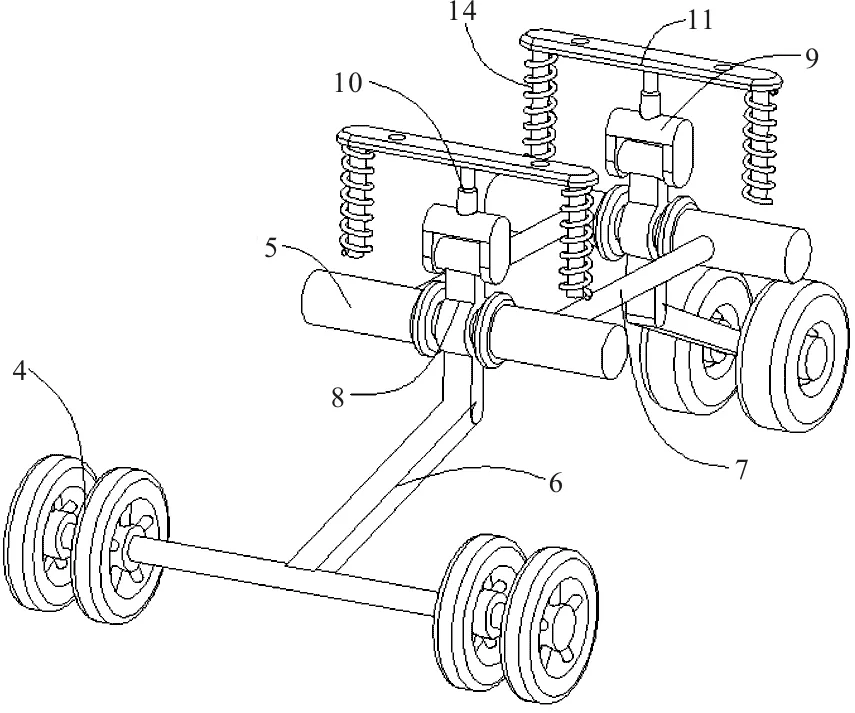
圖3 智能移動機器人車輪立體結構示意
由圖2和圖3所示,中軸桿5與機器人本體1固定連接,且中軸桿5與車軸桿6呈大傾角夾角狀結構,并且車軸桿6與車輪4轉動連接,同時車輪4呈前寬后窄的結構,前寬后窄的三輪車輪結構,能夠穩固保持裝載貨物的機器人前部位置的穩定,從而避免機器人側翻,并能夠保持機器人整體框架的穩定;主橫桿7與中軸桿5在同一水平面上處于垂直連接關系,且中軸桿5關于機器人本體1中心對稱的設置有2組,并且中軸桿5中部位置上還設置有環形組件8,同時中軸桿5與環形組件8組成轉動結構,當機器人行駛至路面顛簸路段時,主橫桿7與中軸桿5構成的水平框架結構能保持對機器人本體1的穩定支撐,同時環形組件8上連接的車軸桿6能夠在中軸桿5上進行轉動,從而緩沖地面顛簸的震動。
由圖3和圖4所示,環形組件8上還轉動設置有支撐架9,且支撐架9頂部還設置有升降桿10,并且升降桿10上還水平連接有固定桿11,當路面顛簸時,安裝在支撐架9上的升降桿10將固定桿11底部抬升至感應臺12上側并保持一定緩沖間距,而與環形組件8轉動連接的支撐架9能保持支架不受車輪4顛簸影響;固定桿11兩側還對稱設置有感應臺12,且感應臺12上還對稱開設有側卡槽13,并且側卡槽13與固定桿11之間還設置有彈簧桿14,固定桿11兩側安裝的感應臺12能夠實時感應并檢測機器人的重心位置,并對固定桿11上連接的置物臺15通過側卡槽13內的彈簧桿14進行緩沖支撐。
由圖2和圖5所示,承載架16與緩沖架17在置物臺15底部呈交錯連接結構,且承載架16和緩沖架17分別與置物臺15和感應臺12構成三角形結構,并且置物臺15通過緩沖架17與感應臺12構成彈性結構,當機器人行駛至轉彎處時,感應臺12感應到貨物和置物臺15重心向一側偏移后,控制承載架16轉動角度推動置物臺15返回水平位置,并對置物臺15另一側的緩沖架17進行壓縮,從而使置物臺15和貨物能保持穩定運輸。
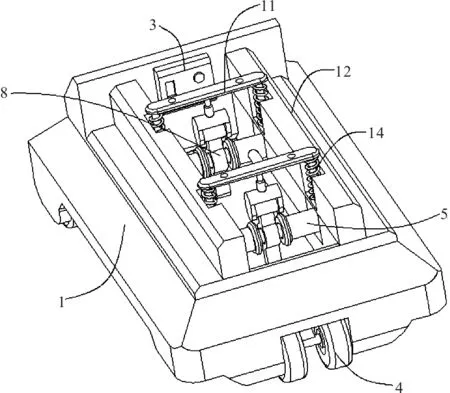
圖4 智能移動機器人本體立體結構示意
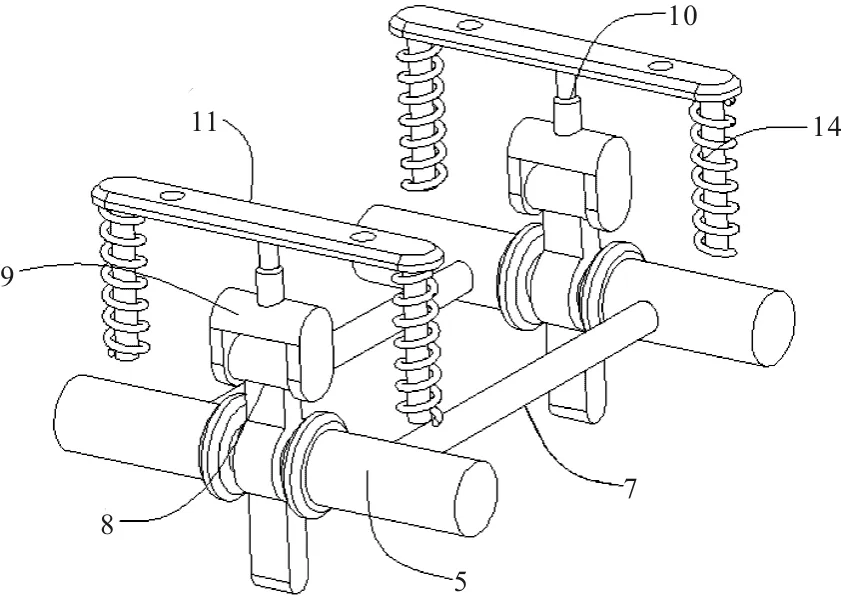
圖5 智能移動機器人固定桿立體結構示意
4 防彎道側翻的智能移動機器人的工作原理
由圖1~5所示,使用該智能移動機器人時,首先機器人本體1在行駛至轉彎處時,通過感應探頭2監測到路面信息而傳遞至中控器3,由中控器3控制車輪4及機器人本體1減速,而在行駛在路面顛簸的環境中時,安裝在支撐架9上的升降桿10自動抬升固定桿11與感應臺12上表面產生一定間距,從而有利于兩側側卡槽13中的彈簧桿14對固定桿11和置物臺15進行緩沖支撐,而在轉彎時,因受到較重貨物以及堆放貨物較高的影響,使貨物以及機器人重心會向轉彎方向內側偏移,此時感應臺12控制置物臺15底部兩側的承載架16會自動調整連接角度,并壓縮另一側的緩沖架17對置物臺15進行穩定支撐,并推動置物臺15返回與地面的水平位置角度,從而避免機器人和貨物側翻,這就是該可防止彎道側翻的智能移動機器人的工作原理[10,11]。
與現有技術相比,設計的智能移動機器人具有以下特點。
(1)機器人本體上設置感應探頭、中控器和車輪的結構,通過機器人本體正前方設置的感應探頭對道路環境進行監測,并利用中控器對監測數據進行判斷,以及通過前寬后窄的三輪車輪結構實現貨物的穩定運輸的原理,達到裝置能夠便于對行駛路徑進行實時監測,并在需要拐彎時控制機器人減速,同時能夠保持機器人整體運行結構的重心穩固的目的[12,13]。
(2)置物臺上設置感應臺、彈簧桿、承載架和緩沖架的結構,通過感應臺內置的重心感應設備監測置物臺的重心偏移方向和角度,并利用彈簧桿對貨物給置物臺施加的壓力進行緩沖,同時利用感應臺控制不銹鋼承載架轉動角度[14,15],以及緩沖架壓縮內置彈簧將置物臺擺正的原理,實現裝置能夠便于控制機器人轉彎時,上貨物重心偏移時調節置物臺的水平方向,進而保持載貨重心的穩固的功能[16]。
5 結語
本文給出了具體的設計方案以及實施說明,并且闡述了工作原理。通過上述3個方面的分析,可以看出,設計的可防止彎道側翻的智能移動機器人,主要是通過在機器人本體上設置感應探頭、中控器和車輪的結構以及在置物臺上設置感應臺、彈簧桿、承載架和緩沖架的結構,可以做到在拐彎時控制機器人減速,以及保持機器人整體運行結構的重心穩固。與現有技術相比,設計的一種可防止彎道側翻的智能移動機器人具有能夠保持機器人整體運行結構的重心穩固和載貨重心穩固的特點。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
少先隊活動(2021年4期)2021-07-23 01:46:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
制造技術與機床(2017年3期)2017-06-23 08:11:21
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
