有纜海底觀測系統浪涌電流抑制電路設計
2022-06-20 11:23:02顧吉星霍建玲劉松堂
海洋技術學報 2022年2期
李 超,顧吉星,霍建玲,劉松堂
(1.國家海洋技術中心,天津300112;2.自然資源部海洋觀測技術重點實驗室,天津 300112;3.國家海洋局煙臺海洋環境監測中心站,山東 煙臺 264010)
進入21 世紀,人類對海洋的探索由海面延伸到幾千米甚至萬米水深的海底,海面和空間的觀測技術顯得捉襟見肘,一種全新的監測技術孕育而生——有纜海底原位在線監測技術。科學家在實驗室即可實時瀏覽海底監測儀器上傳的數據,并遠程控制儀器的工作狀態。海底原位在線監測技術既擺脫了船舶監測的船時限制,又不受惡劣天氣的影響,還能通過因特網技術將大容量的視頻圖像源源不斷地傳到實驗室,使人們親眼看到海底的景象,開辟了海洋監測的新時代[1]。隨著海洋觀測技術的發展,鑒于海底原位在線監測技術的優勢,越來越多的國家開始有纜海底觀測系統的研究和建設。美國在有纜海底觀測技術方面是起步最早、種類最多、技術最全的國家,目前建有不同專業用途的海底站網近20 個。1996 年建成的長期生態系統觀測站(Long-term Ecosystem Observatory,LEO) 是美國第一個有纜海底觀測系統,用于長期觀測近岸大陸架海水的生態環境[2]。2015 年建成的美國海洋觀測計劃(Ocean Observation Initiative,OOI)是目前世界上區域最大、觀測范圍最廣、傳感器種類最多的有纜海底觀測系統[3-4]。加拿大在2009 年建成的東北太平洋時間序列海底聯網試驗網(North-East Pacific Time -series Undersea Networked Experiments,NEPTUNE)是世界上最早的真正意義上的區域性海底觀測網,主干網全長800 km,最大水深2 660m[5-6]。此外,日本也建成了地震和海嘯海底觀測密集網絡(Dense Ocean-floor Network System for Earthquakes and Tsunamis,DONET)[7]。與國外相比,我國在有纜海底觀測技術方面起步較晚,但近些年在國家多個部門的支持下,我們加快了這個領域的研究進度,也取得了一定的成果,如同濟大學于2009 年在東海小衢山建立了國內首個海底觀測試驗站、中國科學院南海海洋研究所于2013 年建成海南三亞試驗站,以及浙江大學于2014 年在東海建成的摘箬山島海底觀測網絡示范系統等[8-9]。
有纜海底觀測系統是由岸基站、光電復合纜和海底控制艙組成的長期海底原位在線觀測系統,控制艙的主要功能是完成電壓變換和網絡通信。控制艙將岸基站輸送到水下的高壓直流電壓(通常為幾百伏到一萬伏)變換成直流低壓(通常為12~48 V),通過統一的供電接口給科學儀器供電。控制艙供電通常由繼電器控制,繼電器吸合瞬間會在供電線路上產生一個很大的電流,這就是我們通常說的浪涌電流。浪涌電流產生的原因主要由供電線路上的等效電容和控制艙內濾波電容引起,電容的等效電阻很小,因此會產生很大的電容充電瞬時脈沖電流,也稱為輸入浪涌電流[10-11]。浪涌電流的尖峰可能比穩態電流大幾倍甚至十幾倍,如不加以抑制,很容易造成后級電路保護器件燒毀、繼電器開關觸點熔焊及元器件受損等故障,嚴重影響控制艙的正常運行,進而影響整個海底觀測系統的運行安全。因此,浪涌電流的抑制對控制艙的穩定運行至關重要,本文在分析浪涌電流產生機理的基礎上,對浪涌電流抑制電路開展研究,分析了現有傳統浪涌電流抑制電路的優缺點,設計了基于金屬-氧化物半導體場效應晶體管(Metal-Oxide-Semiconductor Field-Effect Transistor,MOSFET)的母線浪涌電流抑制電路,并詳細介紹了元器件參數的計算過程,最后通過實驗和示范運行對電路的性能進行驗證。
1 浪涌電流產生原因分析
海底觀測系統控制艙電源變換系統框圖如圖1所示。Cr 為岸站到控制艙之間母線的等效電容,母線越長Cr 值越大,當母線長為幾十米時,Cr 可忽略不計,但當達到幾公里甚至更長距離時,則需考慮Cr 對浪涌電流的影響。為了抑制傳導干擾,在直流/直流(Direct Current/Direct Current,DC/DC)變換器的前端通常會設置電磁干擾(Electro Magnetic Interference,EMI)濾波電路,其中含有數值較大的濾波電容。另外,DC/DC 變換器本身為了濾除一些低頻和高頻干擾噪聲,也含有大量的電容。繼電器吸合瞬間,電源對濾波電容充電,直至電容充滿電后電壓穩定。由于電容的等效電阻很小,充電時近似于短路,因此會產生很大的瞬時浪涌電流,且電容容量越大,浪涌電流也越大[12]。

圖1 控制艙電源系統框圖
2 傳統浪涌電流抑制電路
根據上述對浪涌電流產生原因的分析,通常采用在母線的輸入端串聯抑制性器件進行浪涌抑制。目前,較為傳統的浪涌電流抑制方法主要有3 種[13-14]。
(1)串聯電阻。在母線上串聯電阻,通電瞬間通過電阻給后面的電容充電,由于電阻具有較高的阻抗,從而減小浪涌電流。但這種方法存在缺點,系統正常工作后,串聯的電阻會持續產生功率損耗。因此,對電路進行改進,在電阻上并聯繼電器,在系統正常工作后,通過延時電路控制繼電器吸合將電阻短路,此電路形式相對復雜,需要有專門的延時電路控制繼電器。
(2) 串聯負溫度特性的熱敏電阻(Negative Temperature Coefficient Thermistor,NTC)。NTC 的阻值與溫度成反比,常溫下電阻較大,利用自身的高阻特性抑制浪涌電流,通電后由于自身損耗產生熱量,其阻值隨之降低,自身功耗也隨之降低。該電路的優點是結構簡單,缺點是關機后立即再次開啟,NTC 電阻會失去浪涌電流抑制效果,原因是NTC 電阻已經處于高溫狀態,阻值已經非常小。
(3)串聯電感。在母線上串接一個差模電感,電感前的母線上并聯一個快恢復型二極管用于續流。電路的原理是利用電感抑制電流不能突變的基本特性,從而達到抑制浪涌電流的作用。該電路的優點是結構簡單,實現方便。缺點是電感串聯在回路中,產生功率損耗。另外,由于電感的體積較大,也不利于空間有限的水下密封艙體內安裝。
3 基于MOSFET 場效應管的新型浪涌電流抑制電路設計
3.1 MOSFET 場效應管的工作原理
如圖2 所示,MOSFET 場效應管在柵極電壓控制下的導通過程分為4 個階段[15-16]。

圖2 MOSFET 場效應管的導通過程曲線
第1 階段:t0~t1,柵極電壓UGS由零上升到開啟電壓UTH,這個階段漏源極電流IDS幾乎為零,管子處于截止狀態。
第2 階段:t1~t2,柵極電壓UGS由開啟電壓UTH繼續上升到米勒平臺電壓,漏源極電流IDS逐漸增大,這個階段管子導通并工作在可變電阻區。
第3 階段:t2~t3,柵極電壓UGS維持在米勒平臺電壓,管子完全導通并工作在放大區,漏源極電流IDS達到飽和并維持恒定。
第4 階段:t3~t4,柵極電壓UGS由米勒平臺電壓繼續增大至管子的驅動電壓,此時管子完全導通。
MOSFET 場效應管是電壓控制型器件,當其工作在可變電阻區,即導通過程的第2 階段時,可以看作是一個壓控電流源,漏源極電流IDS隨柵極電壓UGS近似呈線性增大,控制柵極電壓的變化就能控制流過漏源極的電流大小。因此,通過適當延長MOSFET 管柵極輸入電壓建立的時間,控制其在可變電阻區的導通過程,使母線上的浪涌電流得到控制。
基于MOSFET 場效應管的浪涌電流抑制電路,除了能夠解決傳統電路本身固有的缺點外,還具有體積小、開關速度快、損耗小和驅動方式簡單的特點,輔以簡單的外圍器件即可方便的搭建浪涌電流抑制電路。根據內部導電溝道的不同,MOSFET 場效應管可分為P 溝道和N 溝道兩種類型,因P 溝道的MOSFET 導通電阻大、價格高和替換種類少等原因,本文選用N 溝道MOSFET 設計浪涌電流抑制電路。
3.2 MOSFET 場效應管浪涌電流抑制電路設計
如圖3 所示,輸入電壓為直流375 V,基于MOSFET 場效應管的浪涌電流抑制電路由MOSFET場效應管、電阻、電容和穩壓管等無源器件組成。圖中VT 為N 溝道MOSFET 場效應管,R1、R2 為分壓電阻,R3 為限流電阻,C1 為充電電容,Cr 和Rr 為供電系統總的等效電容和等效負載。

圖3 浪涌電流抑制電路
繼電器J 吸合瞬間,由于電容C1 兩端電壓不能突變,VT 的柵極電壓UGS被鉗位在0 V,VT 截止,Cr 上沒有充電電流。隨著輸入電壓經過電阻R1 給電容C1 充電,柵極電壓UGS逐漸升高,等到達開啟電壓UTH后,VT 開始導通并工作在可變電阻區,此時電流IDS由零逐漸變大,開始給電容Cr 充電直至充滿。隨著UGS繼續升高到米勒平臺電壓,最后穩定在設計的驅動電壓值,VT 完全導通。整個電路通過電阻R1、R2 和電容C1 的值調整VT 柵極電壓UGS的上升斜率,控制電流IDS的大小,使電路得到較好的浪涌電流抑制效果。
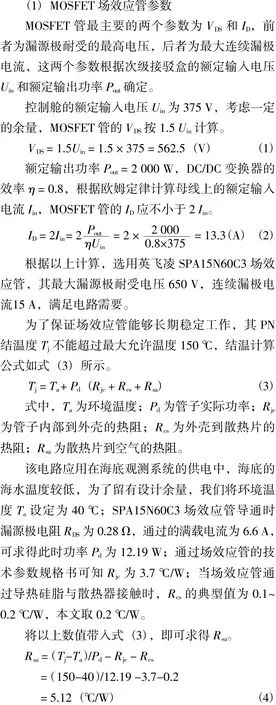
由式(4)可知,選用熱阻小于5 ℃/W 的散熱器即可保證SPA15N60C3 場效應管的結溫不超過150 ℃,選好散熱器后再通過實際測量管子外殼的溫度進行修正。
(2)其他無源器件參數
電路中其他無源器件包括電阻、電容和穩壓管。MOSFET 場效應管柵極的驅動電壓不能超過20V,通常取10~15 V,驅動電壓由電阻R1 和R2 分壓獲得。分壓的同時,為了降低電阻上的損耗,需增大阻值以降低電流,R1 取510 kΩ、R2取18 kΩ,根據歐姆定律可計算驅動電壓約為13 V。R1的功率損耗約為0.257 W,R2功率損耗約為0.009 W,R1和R2可選擇5%精度的金屬膜電阻,功率分別為1 W 和0.25 W。R3為場效應管柵極限流電阻,通常取幾歐姆到十幾歐姆,可采用5%精度的金屬膜電阻,阻值5.1 Ω,功率0.25 W。穩壓二極管D1用于保護場效應管不會因柵極電壓過高而損壞,可選用1N5245,其穩壓值15 V,功率0.5 W。
R1的阻值確定以后,電容C1 的大小決定著場效應管柵極電壓建立的快慢。繼電器J 吸合后,電源經過電阻R1對C1 進行充電,C1上電壓與時間的變化關系如式(5)所示。

3.3 試驗驗證
浪涌電流抑制電路板設計完成后,在核電站致災生物監測項目的供電系統中應用并加以驗證。監測系統供電控制艙電壓變換控制板如圖4 所示,包括浪涌電流抑制板和電壓變換控制板。電壓變換控制板輸入電壓375 V,輸入濾波電容200 μF,電壓變換后共有4 路輸出,其中1 路48 V、2 路24 V、1 路12 V,輸入和輸出均設有電壓、電流信號采集。

圖4 電路板實物圖
測試儀器為YOKOGAWA DL950 示波記錄儀,分別測量了輸入母線上接入浪涌電流抑制電路板和沒有接入浪涌電流抑制電路板兩種情況下的浪涌電流,如圖5 和圖6 所示。圖片中下半部分為上半部分浪涌電流的局部放大,從局部放大圖中可以看到有兩個電流尖峰,第一個電流尖峰是開機瞬間給電路板上的兩個濾波電容充電的電流,即主要的浪涌電流。第二個電流尖峰是給濾波電容充滿電后,后級的DC/DC 變換器開始工作時的浪涌電流。未接入浪涌電流抑制電路板時,開機瞬間母線上的浪涌電流峰—峰值為11.55 A,接入浪涌電流抑制電路板后的浪涌電流峰—峰值為4.14 A。可以看出,浪涌電流抑制電路將浪涌電流限制在了合理范圍內,有效降低了母線上的輸入浪涌電流,取得了預期的抑制效果。

圖5 未接入浪涌電流抑制板的浪涌電流波形

圖6 接入浪涌電流抑制板的浪涌電流波形
4 結 論
本文通過對浪涌電流產生原因的分析,提出了一種基于MOSFET 場效應管的浪涌電流抑制電路,并成功應用在國家重點研發計劃“濱海核電站取水區典型致災生物立體監控系統及應用示范”項目致災生物監測供電系統中。在沒有接入浪涌電流抑制板時,開機瞬間,電源直接給電容充電,瞬間充電電流達到11.55 A,勢必對電路中元器件造成沖擊,影響使用壽命。接入浪涌電流抑制板后,開機后串聯在母線上的MOSFET 場效應管SPA15N60C3 并未導通,母線上的電流為零,隨著柵極電壓逐漸增高,SPA15N60C3 開始工作在可變電阻區,母線上開始出現充電電流并逐漸增大,最大充電電流為4.14 A。隨著電容上的電壓逐漸升高,充電電流逐漸減小,當電容充滿電后,電流穩定在系統空載電流值,約0.3 A。對比浪涌電流的大小,接入浪涌電流抑制板后,浪涌電流減小為原來的三分之一。實驗證明,基于MOSFET 場效應管的浪涌電流抑制電路能夠很好地起到供電母線上浪涌電流的抑制作用,有效地保護后級元器件,提高供電質量。致災生物監測系統于2021 年9 月布放在海南昌江核電冷源取水口,截至目前供電系統一直穩定運行,保障系統獲得實時的監測數據。示范期間經歷多次人為停斷電,恢復供電以后,系統均能正常工作,通過上位機監控軟件顯示浪涌電流均在可控范圍內,示范運行結果表明浪涌電流抑制方案的可靠性和穩定性。