基于無人機影像數據的三維景觀圖制作研究
2022-06-19 00:45:15李燕燕
科技創新導報 2022年3期
關鍵詞:無人機
李燕燕
摘要:城中村復合目標自動高精度三維重建是城市三維重建以及城中村變化監測的重要環節,而典型城中村區域通常是高、低不同的建筑物并存,房屋比較密集,從而影響了目標三維模型的精度。針對這一問題,本文提出一種利用無人機序列影像和POS數據自動生成TIN點云模型、格網DSM和DOM的方法,并通過DOM與DSM的疊加,制作出該研究區的城中村三維數字模型,驗證了利用無人機數據進行城中村三維模型的有效性。此外,通過比較不同情況下三維模型間的差異,分析格網DSM的精度與點云的提取密度、點云過濾和格網尺寸的關系。
關鍵詞:三維建模 無人機 DSM 城中村 點云
近年來,城市建筑物等目標的空間信息的獲取技術得到了極大的發展,有了越來越多的空間信息的獲取手段,如GPS、攝影測量、遙感、三維激光掃描、干涉雷達技術等[1],但無論是LiDAR,還是傳統的攝影測量手段,獲取數據所需花費的費用都很高,特別是當需要進行重復觀測時所花費的費用將更高。而無人飛行器(UAV)的出現,其以機動靈活、高效快速、精細準確、作業成本低、適用范圍廣、生產周期短等優點,很好地解決了上述難題。
DSM是一種包含地表多種信息的地表三維模型,在研究地表信息、城市三維建模、變化監測以及輔助其他手段進行其他的應用等方面有著重要的作用。而無人機航空攝影測量作為一種新型的航測手段,相較于傳統航測,優點比較突出,成本費用較低[2]。但是到目前為止,無人機數據的處理還不太成熟,特別是應用于城中村DSM、DOM以及三維模型的建立方面。具體問題在于:典型城中村區域通常是高低不同的建筑物并存,大多數房屋比較密集,這給影像匹配帶來了困難。因此,本文利用河北某地區的小區域內的無人機航攝數據,研究如何利用無人機航攝數據生成城中村的DSM,最后進行實驗驗證,并對結果進行分析和精度評價,希望能為后續的相關研究提供一定的基礎。
1數據獲取與處理
1.1? 無人機數據及研究區概況
本次實驗所用的數據是河北某市的無人機航攝數據,該數據是使用固定翼無人機拍攝的,平均地面采樣距離(GSD)是6.11712cm/像素。航向和旁向重疊度分別是65%和35%。POS數據中的外方位元素是隔片記錄,由于保密政策,本次使用的POS數據采用獨立坐標系。本研究區有效使用了11張影像,影像的存儲格式為JPG,是真彩色影像。
無人機數據覆蓋的區域位于河北某市城中村,實驗區內房屋密布,主要的人工設施有道路、普通居民住宅、高層的商業用樓、大型的體育場、操場、廣場,此外實驗區還有建筑物密集的城中村及遍布整個實驗區的零星的植被,實驗區的還存在形狀奇特的建筑物,情況相當復雜。
1.2 無人機數據及研究區概況
本次實驗使用Pix4Dmapper生成較高精度的DSM和DOM,進而利用ArcGIS制作該區域的三維景觀圖。主要包括以下步驟:(1)數據預處理:包括POS數據的存儲格式編輯及內方位元素的計算。(2)初步處理:包括識別和校正相機模型、完成影像間的相對定位及區域網平差。(3)空三加密:提取點云和過濾平滑點云。(4)生成數字表面模型和數字正射影像:包括生成數字表面模型和影像的正射糾正及拼接[3]。
1.2.1 空三加密
在Pix4Dmapper中,航攝數據經過初步處理,就完成了內定向、相對定向和絕對定向,像片的正確位置就已經糾正過來了,對應的地面點的坐標就可以量測計算出來了,下面就可以進行空三加密了。該軟件的空三加密包括點云加密、點云過濾和平滑3個主要的過程,3個過程都是為了提取到質量較好的點云數據,為后續生成數字表面模型做準備[4]。
經過合適的點云加密模式加密的點云,在密度方面已經可以滿足生成數字表面模型的需求了,但是由于影像自身和軟件的原因,這些點云中不可避免地存在著異常點,這需要對加密的點云進行過濾降噪。Pix4Dmapper中對于點云的過濾主要是通過改變噪波過濾的半徑來實現的,不同的點云過濾半徑會得到不同的結果,一般來說,半徑越大,過濾掉的點越多,丟失的表面特征也越多。雖然點云經過過濾去除了異常點,也在軟件中生成了一個數字表面,但是這時的表面是不平滑的,甚至某些地物的表面特征發生了改變(如建筑物的頂部變得非常尖銳),這就需要對這個表面進行平滑,這里軟件提供了3種平滑模式(sharp、smooth和medium)來改善這種情況。sharp模式可以保留更多的轉角、邊緣等特征,smooth模式就是平滑整個表面,medium是以上兩者的綜合。為了更好地保留實驗所得的點云數據和保證地物表面擁有更多的特征,本次實驗采用點云過濾半徑為10(該數值為軟件提供的默認值)、平滑模式為sharp。
1.2.2 DSM和DOM生成
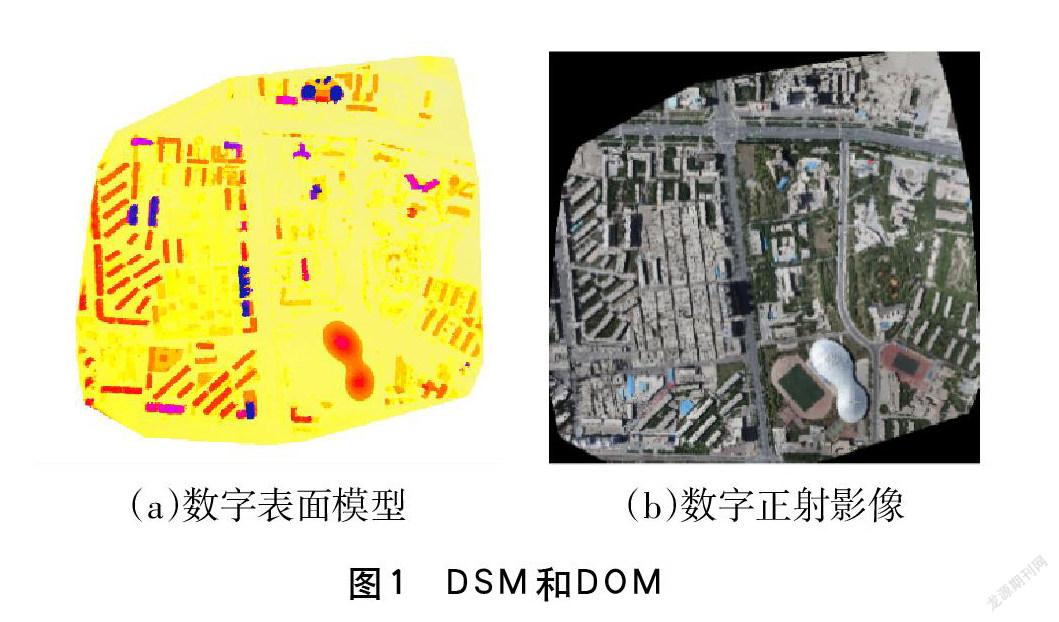
數字表面模型的生成是基于點云加密得到的點云數據來完成的,本次實驗使用的軟件生成的DSM是格網DSM,它的精度主要受格網大小影響,這一點在隨后的精度分析中將會重點來說明。由于考慮到計算的速度,因此軟件中生成的DSM的實際過程是:先分塊生成各個小塊的DSM,然后再將各個小塊鑲嵌拼接生成大幅的DSM,這樣做的好處就是可以加快計算的速度,節省時間[5]。至于數字正射影像的生成,就是基于先前生成的DSM來完成了,與常見的數字攝影測量軟件一樣,該軟件也可以進行正射影像的鑲嵌和拼接線編輯。只是有一點不同于其他的軟件,這里使用的是DSM進行正射糾正,而不是常見的DEM,所以這里生成的數字正射影像實際上是真數字正射影像(T-DOM),相比于傳統的DOM糾正的質量更好,也更精確一些,圖1為最終的所得產品。
2 實驗結果及精度分析
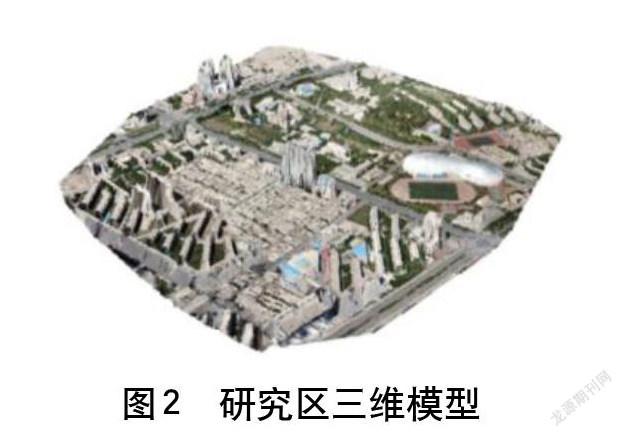
圖2是在ArcScene中,在實驗所得的DSM上添加實驗所得的DOM作為紋理所生成的三維圖,目視觀察,實驗所得DSM結果與實際地表之間還是十分吻合的,它們的紋理基本一致,這也就是說明實驗結果還是不錯的。584622D3-2AEC-4822-BBA9-FD7A6496236D
由于本次實驗的數據采用的是獨立坐標系,無法對實驗的結果進行具體的數據精度檢驗,因此開展了以下分析,即分析了影響實驗結果DSM精度的幾個因素:(1)點云過濾對最終生成的DSM的影響;(2)格網大小對DSM、DOM精度的影響。
2.1 點云過濾對最終生成的DSM的影響
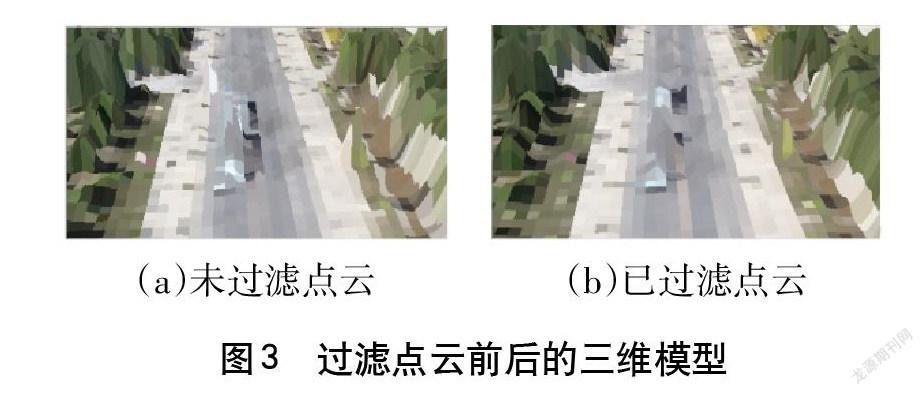
圖3中的(a)是經過過濾的點云生成的DSM,(b)則是未過濾的點云所生成的DSM。經過對比兩幅圖像的細節,發現它們在大的方面相差不大,只是在細節方面存在一些差異。這兩幅圖是在同一區域中,兩幅圖中所在的區域都是在一條道路上,由于未知的原因導致在該道路上存在有誤差點,使得本該平整的路面變得凹凸不平。對比過濾前后的圖像發現,雖然過濾后,該公路上仍然是凹凸不平的,但是比起過濾前有了很大的改善,起伏減小了,但是沒有完全消除,這可能是過濾條件選擇不合理導致的。另外,道路兩旁的樹木在過濾后變得平滑、柔和,而在過濾前這些樹木顯得十分生硬、尖銳。由此,可以確定點云過濾與最終生成的DSM的精度有一定的關系,經過點云過濾后,對于DSM的精度有一定的改善作用[6]。
2.2 格網大小對DSM、DOM精度的影響
分析格網大小為10cm和100cm時生成的點云模型情況,發現:在較小的格網尺寸中點云十分密集,幾乎看不到點,物體的表面輪廓十分清晰,但是在較大的格網尺寸下已經完全可以看到排列整齊有序的點云了。
結合圖4,同一區域在不同的格網尺寸上有不同的結果。例如:在正射影像中可以看到操場上有6個球門,在(a)圖中這6個球門比較矮小,而在(b)圖中則比較高大;再比較兩幅圖中的樹木,發現(a)圖中的樹木比(b)圖中的也高大了不少。但是如果詳細地比較兩幅影像的話,肯定是(b)圖更好一些,首先,根據真實情況,球門一般都是只有門柱才是最高的,其余部分是球網,不可能出現(a)圖中如此高大的實體;其次,(b)圖中的樹木也更真實一些,因為它更符合一個常識問題,即樹木一般是呈傘形生長的,而不像(a)圖中的那樣幾乎就是柱形的。因此,可以得出結論:格網的尺寸確實對DSM的精度有直接的影響,而且格網的尺寸越小,格網DSM的精度也越高。
3 結語
本文通過對無人機數據利用Pix4Dmapper數字攝影測量軟件生成了城中村點云模型、DSM和DOM,進而利用ArcSence將DSM表面貼上DOM作為紋理,制作三維模型,然后通過比較不同的三維模型和點云模型,分析了影響DSM精度的因素,最后得出以下結論:使用無人機數據生產數字表面模型主要依托于數字攝影測量手段,在理論和方法上都是現實可行的,而獲取數字表面模型的關鍵在于如何通過數字攝影測量的方式獲取高精度的點云模型數據;點云模型數據質量的好壞與點云加密的尺度和點云過濾的尺度及平滑模式有著一定的關系,合適的點云加密尺度和過濾方式,可以有效地改善數字表面模型的精度;格網DSM的精度與格網的尺寸有著直接聯系。
但本次實驗采用的無人機數據由于POS數據保密原因,未生成絕對的立體模型,無法對模型精度進行實際檢驗,還需要采用適合的方法進行精度檢驗。此外,特征匹配算法的參數設置過于繁瑣,總是需要進行多次的實驗才能得到較為理想的匹配結果。因此,有待進一步的改進和研究。
參考文獻
[1]趙浚壹.基于深度相機的無人機三維場景重建技術研究[D].桂林:桂林電子科技大學,2021.
[2]詹容若,段亮,羅曉容,等.無人機多點位航拍高分辨率三維數字露頭建模[J].西安科技大學學報,2021,41(6):1050-1058.
[3]石礎.面向城市三維重建的無人機航拍路徑規劃方法研究[D].天津:天津理工大學,2021.
[4]劉洋,廖東軍,王朝剛,等.無人機近景攝影支持下的古建筑三維建模[J].測繪通報,2020(11):112-115.
[5]席敏哲.基于無人機傾斜影像的精細化三維模型構建及智慧園區應用研究[D].西安:西安科技大學,2020.
[6]周增輝,謝作勤,魏見海,等.無人機三維實景建模技術在路塹邊坡地質信息提取中的應用[J].公路,2020,65(1):152-156.584622D3-2AEC-4822-BBA9-FD7A6496236D
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
