神經(jīng)網(wǎng)絡模糊PID控制半主動懸架系統(tǒng)
2022-06-17 03:36:40王文博錢愛文
洛陽理工學院學報(自然科學版) 2022年2期
王 琳, 王文博, 錢愛文
(1.蚌埠學院 機械與車輛工程學院, 安徽 蚌埠 233030; 2.洛陽理工學院 電氣工程與自動化學院, 河南 洛陽 471023)
懸架是一個復雜的非線性系統(tǒng),用來連接車輪與車架,將路面作用于車輪上的各種力及力矩傳給車架,緩和因路面不平產(chǎn)生的沖擊,改善汽車平順性[1]。被動懸架阻尼器無法調(diào)節(jié),難以滿足不同工況下舒適性的要求。因此,根據(jù)不同路況調(diào)節(jié)懸架阻尼來優(yōu)化汽車振動特性成了懸架領域研究的熱點之一[2-5]。模糊控制可以有效解決車輛半主動系統(tǒng)的多參數(shù)非線性問題,對過程參數(shù)的變化不敏感,魯棒性好,通用性強,但存在穩(wěn)態(tài)誤差[6-7];經(jīng)典PID控制策略簡潔有效,可以有效消除穩(wěn)態(tài)誤差[8-9],但只適用于能夠建立精確數(shù)學模型的線性定常參數(shù)系統(tǒng)。將模糊控制和PID控制相結(jié)合,設計出能夠調(diào)整PID控制參數(shù)的模糊PID控制器。模糊PID控制汽車半主動懸架系統(tǒng)具有良好抑制擾動的能力,對多種激勵信號響應過沖量小,調(diào)節(jié)時間短,綜合性能指標好[10-12]。以車輛懸架動撓度作為控制輸入[13],建立模糊PID控制模型,將其應用于半主動懸架數(shù)學模型,車輛的平順性得到明顯改善。PID控制器3個增益參數(shù)的確定依賴于模糊系統(tǒng)中模糊規(guī)則的制定,控制效果的優(yōu)劣取決于研究者的經(jīng)驗。文獻[14]針對車輛半主動懸架,提出一種變論域模糊PID控制方法,以解決模糊PID存在的因模糊規(guī)則制定盲目性而產(chǎn)生的在線調(diào)節(jié)時間過長的問題。文獻[15]采用遺傳算法優(yōu)化模糊PID控制器的懸架,車身振動加速度、懸架動撓度和輪胎動載荷的均方根都有所下降,效果優(yōu)于模糊PID控制。
優(yōu)化車輛車身振動加速度、懸架動撓度和輪胎動載荷等參數(shù)能有效改善整車的操縱穩(wěn)定性及平順性。現(xiàn)有的控制算法也很多,但每種算法均有局限性,難以獲得最優(yōu)參數(shù)。BP神經(jīng)網(wǎng)絡算法具有較強的函數(shù)逼近性,適合復雜非線性系統(tǒng)的建模與控制,但收斂慢、易陷入局部最小。本文將自適應學習算法應用于BP神經(jīng)網(wǎng)絡,既保留了BP神經(jīng)網(wǎng)絡算法的非線性映射及泛化能力,又克服了其不足之處。
以某轎車為研究對象,在深入分析懸架性能指標的基礎上建立二自由度1/4半主動懸架數(shù)學模型,利用模糊邏輯規(guī)則將狀態(tài)變量進行模糊化和歸一化處理,再輸入神經(jīng)網(wǎng)絡中,BP神經(jīng)網(wǎng)絡技術(shù)對加權(quán)系數(shù)進行調(diào)整,得到優(yōu)化的PID控制參數(shù)。神經(jīng)網(wǎng)絡模糊PID控制半主動懸架,可以實時調(diào)整PID控制器參數(shù),改善車輛的使用性能。
1 半主動懸架動力學模型的建立
1/4半主動懸架模型如圖1所示,有2個自由度,分別為簧上質(zhì)量的垂直運動和非簧載質(zhì)量的垂直運動[16]。
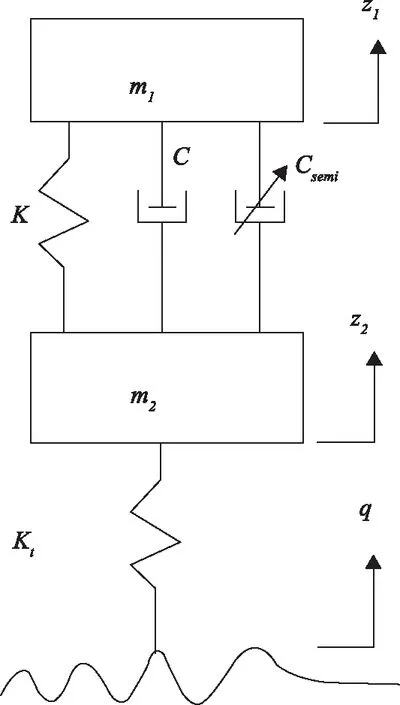
圖1 1/4半主動懸架模型
根據(jù)圖1,由牛頓定律推導出懸架運動微分方程:
(1)
(2)
式中:m1為簧上質(zhì)量;m2為簧下質(zhì)量;K為彈簧剛度;C為減振器阻尼系數(shù);Kt為輪胎剛度;q為路面不平度系數(shù);Csemi(t)為懸架的可變阻尼;z1、z2分別是車身和車輪的垂直位移。
2 半主動懸架控制器設計
神經(jīng)網(wǎng)絡模糊PID控制器以懸架系統(tǒng)的偏差與偏差變化率為輸入?yún)?shù),利用模糊邏輯規(guī)則將狀態(tài)變量進行模糊和歸一化處理,然后利用神經(jīng)網(wǎng)絡自我適應和學習的特點對加權(quán)系數(shù)進行調(diào)整以優(yōu)化PID控制器的3個參數(shù)KP、KI和KD。
2.1 PID控制器設計
PID控制器控制算法:
(3)
式中:u(t)為控制器輸出信號;e(t)為偏差;KP為比例增益;KI為積分增益;KD為微分增益;TI=KP/KI為積分時間常數(shù);TD=KD/KP為微分時間常數(shù)。
結(jié)合齊格勒-尼柯爾斯規(guī)則確定出PID控制器的初始參數(shù)KP0、KI0、KD0。
2.2 模糊控制器設計
2.2.1 輸入和輸出變量值模糊化
為實現(xiàn)控制參數(shù)調(diào)整,需要將車身垂直速度、車身垂直加速度量化到論域{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}中,論域和模糊子集相對應,用負大[NB]、負中[NM]、負小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB]等來表達模糊子集。模糊控制器的輸出變量為ΔKP、ΔKI、ΔKD。輸入變量和輸出變量的隸屬函數(shù)選擇高斯隸屬函數(shù)[10]:
(4)
式中:σ=0.85;c={-6,-4,-2,0,2,4,6}。根據(jù)高斯隸屬函數(shù)可求得各模糊子集的隸屬度。
2.2.2 建立模糊規(guī)則表
(1)KP值取決于系統(tǒng)的響應速度,增大KP可提高響應速度,減小穩(wěn)態(tài)偏差,但KP值過大會產(chǎn)生比較大的超調(diào),過小則響應速度減慢。故調(diào)節(jié)時KP值先增再減,最后再增加。根據(jù)上述規(guī)則,制定KP模糊規(guī)則表,如表1所示。

表1 KP模糊規(guī)則表
(2)調(diào)節(jié)初期為防止積分飽和引起較大超調(diào),KI值要小些,甚至可以為零,調(diào)節(jié)中期考慮到系統(tǒng)穩(wěn)定性,KI值要適中,在調(diào)節(jié)后期應增加KI值以減小調(diào)節(jié)靜差。根據(jù)上述規(guī)則,制定KI模糊規(guī)則表,如表2所示。

表2 KI模糊規(guī)則表
(3)KD值的大小對系統(tǒng)動態(tài)特性調(diào)節(jié)影響顯著,調(diào)節(jié)初期,增大KD值以減小超調(diào)量,鑒于調(diào)節(jié)特性對KD值變動比較敏感,調(diào)節(jié)中期適當減小KD值并保持,調(diào)節(jié)后期應減小KD值以減少調(diào)節(jié)時間。根據(jù)上述規(guī)則,制定KD模糊規(guī)則表,如表3所示。

表3 KD模糊規(guī)則表
2.3 神經(jīng)網(wǎng)絡模糊PID控制器設計
BP神經(jīng)網(wǎng)絡是一種按誤差逆?zhèn)鞑ニ惴ㄓ柧毜亩鄬忧梆伨W(wǎng)絡,包括輸入層、隱含層和輸出層[17]。輸入層有2個神經(jīng)元,分別對應車身垂直速度、車身垂直加速度,輸出層有3個神經(jīng)元分別對應PID控制器的3個可調(diào)參數(shù)KP、KI和KD,如圖2所示。

圖2 BP神經(jīng)網(wǎng)絡結(jié)構(gòu)圖
網(wǎng)絡輸入層:
(5)
網(wǎng)絡隱含層的輸入和輸出:
(6)
(7)
隱含層神經(jīng)元的活化函數(shù)為Sigmoid函數(shù):
(8)
網(wǎng)絡輸出層的輸入和輸出:
(9)
(10)
(11)
(12)
(13)

神經(jīng)網(wǎng)絡具有出色的并行計算、信息容錯和自適應學習功能,但易陷入局部極小值,收斂慢且易引起震蕩。為克服其不足,研究采用變步長BP神經(jīng)網(wǎng)絡算法,通過連續(xù)2次監(jiān)測訓練的誤差值,根據(jù)訓練誤差的反饋做出不同的響應,動態(tài)調(diào)整學習率。誤差下降,則增大學習率;誤差在較小范圍內(nèi),則步長不變;誤差超過設定值,則減小學習率。
網(wǎng)絡輸出層神經(jīng)元選Sigmoid函數(shù)作為活化函數(shù):
(14)
性能指標函數(shù):
(15)
按最速下降法修正網(wǎng)絡權(quán)系數(shù),增加一個使收斂快速的全局極小慣性量,則有
(16)
式中:η為學習率;α為平滑因子。
(17)
用函數(shù)sgn[?y(k)/?u(k-1)]近似代替?y(k)/?u(k-1)。
網(wǎng)絡隱含層加權(quán)系數(shù)的學習算法為
(18)
(19)
式中:
g′(·)=g(x)(1-g(x))
f′(·)=(1-f2(x))/2
網(wǎng)絡輸出層加權(quán)系數(shù)的學習算法為
(20)
(21)
設計好網(wǎng)絡結(jié)構(gòu),確定出訓練算法后,可對神經(jīng)網(wǎng)絡進行訓練。當輸出值達到預期即可停止,否則繼續(xù)進行訓練調(diào)整權(quán)值。
2.4 控制器算法設計
基于BP神經(jīng)網(wǎng)絡模糊PID控制算法的設計流程如圖3所示。

圖3 神經(jīng)網(wǎng)絡模糊PID控制器算法流程圖
3 仿真分析
在Matlab/Simulink模塊中建立神經(jīng)網(wǎng)絡模糊PID控制器,并將其應用于1/4半主動懸架上,如圖4所示。將仿真結(jié)果與被動懸架和模糊PID控制半主動懸架系統(tǒng)進行對比。車輛仿真參數(shù):簧上質(zhì)量m1為365 kg,簧下質(zhì)量m2為38 kg,彈簧剛度K為20 000 N/m,減振器阻尼系數(shù)C為1 300 ns/m,輪胎剛度Kt為180 000 N/m,懸架限位行程6.5 cm。
采用濾波白噪聲隨機路面輸入,仿真時間為100 s,仿真步長為0.01 s,車輛以60 km/h的速度在A、B、C和D級路面上行駛,選取車身垂直振動加速度、車輪動載荷、懸架動撓度作為控制策略的評價指標,仿真結(jié)果如表4所示。受篇幅限制,僅給出車輛在B級路面上的時域曲線,如圖5~圖7所示。

圖4 神經(jīng)網(wǎng)絡模糊PID控制半主動懸架系統(tǒng)模型

表4 懸架性能參數(shù)仿真結(jié)果

圖5 車身垂直振動加速度仿真曲線

圖6 懸架動撓度仿真曲線

圖7 車輪動載荷仿真曲線
由表4可知,在不同等級路面上,采用神經(jīng)網(wǎng)絡模糊PID控制策略和采用模糊PID控制策略的半主動懸架,車身垂直振動加速度均優(yōu)于被動懸架。神經(jīng)網(wǎng)絡模糊PID控制策略對車身垂直振動加速度的抑制效果最為明顯,加速度均方根降低33.33%以上。圖5顯示加速度時域信號變化平緩,最大值沒有出現(xiàn)惡化,神經(jīng)網(wǎng)絡模糊PID控制的半主動懸架系統(tǒng)車身垂向加速度峰值均低于被動懸架和模糊PID控制半主動懸架,且系統(tǒng)舒適性優(yōu)良。
神經(jīng)網(wǎng)絡模糊PID控制半主動懸架的懸架動撓度均方根低于模糊PID控制半主動懸架和被動懸架,降低了5.89%以上。懸架動撓度時域信號變化平緩,隨著路面等級下降,出現(xiàn)了動撓度最大值大于被動懸架動撓度最大值的現(xiàn)象,但低于模糊PID控制策略下的半主動懸架,總體上未出現(xiàn)惡化現(xiàn)象,也未超過懸架的限位行程,充分利用了懸架設計空間,如圖6所示。
不同路面等級,半主動懸架的車輪動載荷均方根降低幅度存在差異,在A級和B級路面上,神經(jīng)網(wǎng)絡模糊PID控制半主動懸架系統(tǒng)的車輪動載荷優(yōu)于模糊PID控制半主動懸架和被動懸架,車輪附著能力良好,車輪動載荷時域信號變化平緩,如圖7所示。但在C級和D級路面上,神經(jīng)網(wǎng)絡模糊PID控制策略下的半主動懸架相對半主動懸架表現(xiàn)略差。
綜上所述,采用神經(jīng)網(wǎng)絡模糊PID控制的半主動懸架可以有效降低車輛的車身垂向加速度、懸架動撓度和輪胎動載荷,3個指標的時域信號變化也比較平緩,在一定程度上改善了車輛的平順性和操縱穩(wěn)定性。
4 結(jié) 語
(1)神經(jīng)網(wǎng)絡模糊PID控制策略能夠有效抑制半主動懸架系統(tǒng)的車身垂直振動加速度、懸架動撓度和車輪動載荷。
(2)本文提出的基于神經(jīng)網(wǎng)絡控制策略為懸架參數(shù)優(yōu)化提供一定參考,但在控制機理方面還有待進一步深入研究。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
幸福(2018年33期)2018-12-05 05:22:42
消費導刊(2018年10期)2018-08-20 02:57:02
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國科技信息(2016年14期)2016-07-31 21:16:32
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26