直流鉆機絞車的特殊振蕩
2022-06-16 10:37:58張建張康利王玉明朱奇先
電氣傳動自動化 2022年3期
關鍵詞:工藝
張建,張康利,王玉明,朱奇先
(1.中國石油集團川慶鉆探工程有限公司川東鉆井公司,重慶 400021;2.大型電氣傳動系統與裝備技術國家重點實驗室,甘肅 天水 741020)
串勵調速拖動在直流鉆機中有大量應用,但高速輕載時的絞車工藝振蕩是其固有缺點。如何消除振蕩、滿足操作要求是設計控制裝備的關鍵環節。本文以SINAMICS DCM整流裝置構成調速系統并研究其控制策略,以供同行參考和探討。
1 起鉆工藝
直流鉆機的絞車用于拖動鉆具,電機輸出軸與傳動機構負載之間通過機械離合器傳遞動力[1]。在起鉆工藝中,大鉤以貓頭速度帶上鉆具負載后,司鉆踩下腳踏控制器(速度給定階躍到額定),電機以控制系統設定的方式加速到額定速度并將大鉤從鉆臺面提升至二層臺附近或特定位置,再松開腳踏(撤除額定、恢復貓頭速度給定)、斷開離合器(卸去負載),進行完其他工藝后,重復上述過程,直到下鉆工藝結束。在卸去負載到恢復貓頭速度之前,電機處于高速空載狀態,如果控制系統沒有合適的預防措施,轉速將大幅波動而無法進行下一步的工藝操作。
2 調速結構
本文以SINAMICS DCM直流調速整流器[2]的數字控制軟件功能塊搭建控制架構,串勵變磁通調速控制結構圖如圖1所示。其中RFG為積分器,ST為速度控制器,LT為扭矩控制器,A1代表晶閘管三相橋式變流器,A2代表電樞電路,A3為電流/反電勢變換環節,A4為反電勢/轉子速度變換環節,A5為濾波器,A6為除法器,A7為磁通模擬器。由圖可見,速度反饋方式與傳統的獲取略有不同。

圖1 串勵變磁通調速控制結構圖
3 振蕩原因
3.1 電流斷續
本文中的電機數據見表1,供電回路見圖2。其中,電源G的電壓為 AC600V50Hz,漏感 LT=0.0025mH,電抗器的漏感 Llx=0.0211mH。
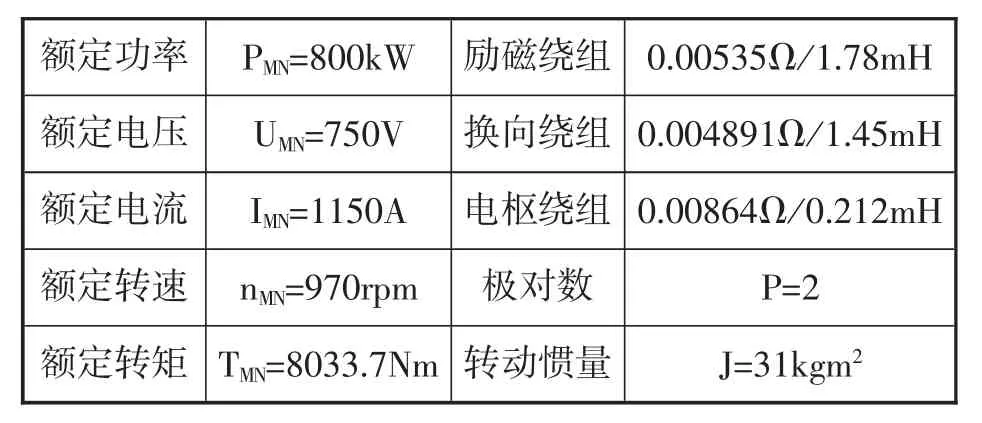
表1 YZ08(A)串勵數據

圖2 供電回路
參照文獻[3]的 6-74 式,取計算系數 C=0.1時,計算的電機電感量為:

按圖2回路供電時,根據文獻[3]的6-77式,取計算系數 Klx=0.1、KL=2、KUV=2.34、UVΦ=600/1.732時,電流的連續最小計算值為:

實際空載運行時電流為50A左右,對比可知其處于斷續狀態。因此,按電流連續配置設計調節控制參數在此時容易振蕩。
3.2 反饋斷續
(1)降速時間
在摩擦扭矩Td作用下,電機轉子從額定速度ne降低到貓頭速度na=0.2ne時,計算的平均時間:

隨著速度的降低,靜摩擦阻力逐漸增大,實際時間比計算的有所減小,實測為40s左右。
(2)調節過程
松開腳踏瞬間,由于反饋(ne)遠大于給定(0.2ne),在速度控制器ST、扭矩控制器LT作用下,橋式變流器A1關斷,無電壓輸出,回路電流中斷,反饋變零;隨著時間延長,貓頭給定在ST、LT作用下,A1開通,輸出相應電壓,由于斷續,電流和磁通立即出現,因慣性,轉子速度較高,感應的反電勢也較高,通過計算獲取的速度反饋仍然大于給定,在ST、LT作用下,A1重新關斷。因此,A1將重復關斷、開通、再關斷、再開通,直到轉子下降到貓頭速度為止。
(3)反饋狀態
根據上面論述,結合速度反饋獲取方式以及電流斷續的情況,起鉆工藝的這個階段,在降速期間,反饋狀態不是恒定量,而是時有時無,兩次有的量值隨著轉子速度的變化而變化,在調節參數合適時處于減幅振蕩狀態,不合適時處于增幅振蕩狀態。
4 應對措施
4.1 控制方面
(1)自適應
在滿足電流連續的控制系統參數下,給電流調節器LT增加斷續自適應控制。根據文獻[4],具體的做法就是在電流斷續時,使其從較大的比例積分器變成小時間常數的積分器,且使該常數按變流器A1放大倍數的降低而相應降低。
(2)斷反饋
增加自適應功能后,由于放大倍數較低,控制系統反應較慢,在貓頭速度加載提升時,有可能出現大鉤停轉或倒轉的不允許現象。因此,可以采用在升速空轉時有自適應,在帶載時取消自適應,從帶載到卸載空轉速度降到貓頭速期間斷開反饋的結構變化解決振蕩問題,這在本文所采用的控制器中很容易實現。
(3)加制動
加制動的方式在ROSS HILL模擬控制的鉆機中大量采用,其實現方法可參見文獻[5]。
4.2 操作方面
根據現場實際經驗,振蕩多數產生于先卸載后松腳踏的操作方式。如果先松腳踏,等速度降到接近貓頭速時,再卸載,則基本上不會有振蕩現象。這雖然犧牲了部分的操作自由度,但換來了控制的簡單、安全、可靠等優點。從解決問題的角度看,也不失為一種有效的措施,只是改變了操作習慣而已。
5 結論
空載高速時的振蕩是串勵調速的固有缺點,這主要是由于電流斷續和反饋振蕩所致。采用自適應控制和合理處理好速度反饋后,能夠很好地應用于工藝復雜的鉆機絞車拖動,可帶來成本較低、控制簡單、可靠耐用等優點。本文以SINAMICS DCM直流調速整流器為基礎構成的控制系統,采取了多種控制措施,經過現場實際驗證,其對于消除振蕩取得了比較理想的效果,可供同行參考。
猜你喜歡
中國特種設備安全(2022年5期)2022-08-26 09:19:32
礦產綜合利用(2020年1期)2020-07-24 08:50:40
山東冶金(2019年6期)2020-01-06 07:45:54
收藏界(2019年2期)2019-10-12 08:26:06
世界農藥(2019年2期)2019-07-13 05:55:12
世界農藥(2019年2期)2019-07-13 05:55:10
模具制造(2019年3期)2019-06-06 02:11:00
山東工業技術(2016年15期)2016-12-01 05:30:59
銅業工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52