改進直通濾波SAC-IA粗配準(zhǔn)算法
2022-06-11 07:29:10宮德寧吳琳娜李榮華盧祺
大連交通大學(xué)學(xué)報 2022年2期
關(guān)鍵詞:特征
宮德寧,吳琳娜,李榮華,盧祺
(1.大連交通大學(xué) 機械工程學(xué)院,遼寧 大連 116028;2.上海宇航系統(tǒng)研究所,上海 201109)
隨著航天技術(shù)的飛速發(fā)展,空間在軌服務(wù)成為當(dāng)前亟需技術(shù),主要包括輔助變軌、碎片移除、在軌燃料加注與延壽、在軌裝配和在軌維修等.空間目標(biāo)三維重建是空間在軌服務(wù)的關(guān)鍵,三維重建技術(shù)主要包括可見光序列圖像和激光雷達方法.Yingying Gu[1]通過單目相機測量,提出了一種在復(fù)雜光照條件下可以穩(wěn)定提取目標(biāo)圖像投影角度的圖像處理方法.劉玉[2]驗證激光雷達的航天器相對位姿測量技術(shù)方法合理可行,測量精度高,可滿足近距離操控中相對導(dǎo)航任務(wù)需求,對國內(nèi)后續(xù)開展工程應(yīng)具有較大參考價值.尹芳[3]針對激光3D點云數(shù)據(jù)跟蹤配準(zhǔn)中產(chǎn)生的累積誤差問題,提出了位姿圖優(yōu)化的SLAM技術(shù)框架的方法.點云數(shù)據(jù)配準(zhǔn)是空間目標(biāo)三維重建必要途徑,準(zhǔn)確的點云配準(zhǔn)可以提高三維重建精度.
點云配準(zhǔn)分為粗配準(zhǔn)[4〗和精配準(zhǔn)[5].粗配準(zhǔn)也叫初始配準(zhǔn),用于處理兩幅未知點云位姿信息,為精配準(zhǔn)提供良好的初值.近年來為了提高配準(zhǔn)精度,越來越多的學(xué)者開始研究粗配準(zhǔn)算法.Rusu[6]提出了計算點云特征描述的子方法,描述了中心點與其領(lǐng)域范圍點之間的空間差異,形成點特征直方圖(Point Feature Histograms,PFH).R.B.Rusueta[7]提出了一種基于FPFH特征的配準(zhǔn)算法,該算法不僅提高了點云配準(zhǔn)精度,也顯著性提高了點云配準(zhǔn)的效率.隨著配準(zhǔn)算法的進一步研究,NDT算法[8]、3DSC算法[9]和4PCS算法[10]開始得到廣泛應(yīng)用.Chen[11]首次在點云配準(zhǔn)中運用RANSAC算法,繼而Rusu[6]通過快速點特征直方圖(Fast Point Feature Histograms,FPFH)描述子和RANSAC原理,提出了SAC-IA(Sample Consensus Initial Alignment)算法.
利用NDT、3DSC、4PCS和FPFH等傳統(tǒng)算法實現(xiàn)了點云的粗配準(zhǔn),對部分點云數(shù)據(jù)能夠得到較好的結(jié)果,為精確配準(zhǔn)提供較好的初始旋轉(zhuǎn)矩陣,但對于衛(wèi)星點云等平面特征多且特征單一的特殊點云模型,容易產(chǎn)生異部分誤匹配,導(dǎo)致粗配準(zhǔn)失敗.針對以上問題,本文提出改進直通濾波SAC-IA粗配準(zhǔn)算法,首先對點云數(shù)據(jù)處理時,先需要進行離群點與噪聲的去除;其次采用PCA算法計算點云數(shù)據(jù)中心點,去除均值,得到協(xié)方差矩陣,從而得出特征值以及特征向量;然后特征向量方向為主成分方向規(guī)定成分方向為Z軸進行坐標(biāo)變換,再對Z軸方向進行直通濾波,保留衛(wèi)星主體部分,去除太陽能帆板,再進行主體部分下采樣濾波,能有效提高配準(zhǔn)精度;最后計算2個待配準(zhǔn)點云的法向量,使用Kd-Tree樹結(jié)構(gòu)對點云的FPFH特征進行加速計算,得到目標(biāo)點云和待配準(zhǔn)點云的FPFH特征.再根據(jù)2個點云相似的FPFH特征,使用SAC-IA算法求解變換矩陣,同時對前期PCA算法處理后的點云進行逆變換,求累積矩陣變換,完成點云粗配準(zhǔn),具體點云粗配準(zhǔn)路線見圖1.

圖1 配準(zhǔn)路線圖
1 改進點云直通濾波
根據(jù)真實衛(wèi)星尺寸進行1∶1三維建模,經(jīng)MeshLab軟件處理三維模型,生成衛(wèi)星點云數(shù)據(jù),最后在通過MATLAB對數(shù)據(jù)仿真,得到局部可視點云,仿真過程中加入噪點,模擬真實數(shù)據(jù)情況.在處理點云數(shù)據(jù)時,大多數(shù)需要通過濾波重采樣來對點云進行預(yù)處理,在保留特征的前提下節(jié)省特征子計算時間,提高點云配準(zhǔn)精度和時效性[12].考慮到衛(wèi)星點云初始目標(biāo)的太陽能帆板平面部分和目標(biāo)點云衛(wèi)星主體平面部分點云造成誤匹配,為了得到準(zhǔn)確的點對對應(yīng)關(guān)系,本文首先去除點云離群點,然后采用PCA變換分析方法估算點云的法向信息,獲得點云的三個主方向,獲取質(zhì)心,求得協(xié)方差矩陣,從而求解出矩陣的特征值和特征向量,特征向量即為主方向.接著校正主方向垂直,變換矩陣為M,對點云進行坐標(biāo)變換,這樣無論衛(wèi)星在任何位姿下,都能準(zhǔn)確地保留中主體部分.計算過程如下:
(1)求每個維度的平均值
(1)
(2)
(3)
式中:N是點云中點的總個數(shù).
(2)求協(xié)方差矩陣以及對應(yīng)的特征值、特征向量
(4)
Cλ=μλ
(5)

利用矩陣知識,求協(xié)防差矩陣C的特征值λ和相對應(yīng)的特征向量μ,特征向量為主方向.
(3)用(1),(2)中獲得的點云主方向和質(zhì)心,將輸入點云轉(zhuǎn)換到原點位置,且主方向與坐標(biāo)系Z軸方向重合.再進行點云直通濾波,如圖2所示,因為衛(wèi)星的點云主體寬度尺寸已知為A,所以直通濾波時選取濾波范圍A,剔除兩側(cè)太陽板,保留衛(wèi)星目標(biāo)的主體部分,點云數(shù)據(jù)通過對主體點云進行下采樣濾波處理,不僅提高了計算效率,而且能有效防止對應(yīng)點對之間產(chǎn)生錯誤,提高準(zhǔn)確率.
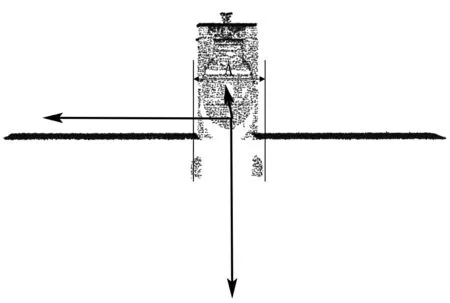
圖2 改進點云濾波圖
2 點云配準(zhǔn)
在點云的初配準(zhǔn)中,首先計算經(jīng)過濾波處理衛(wèi)星點云主體部分中每個點的FPFH,然后使用SAC-IA算法在目標(biāo)點云中查找與待配準(zhǔn)點云中具有相似FPFH特征的點,從這些相似點中構(gòu)建對應(yīng)點對應(yīng)關(guān)系.計算旋轉(zhuǎn)變換矩陣,旋轉(zhuǎn)平移待配準(zhǔn)點云完成配準(zhǔn).
FPFH是由PFH改進而來的,首先計算查詢點與鄰域點之間的關(guān)系,而不計算鄰域點與鄰域點之間的關(guān)系特征,接著再確定查詢點與鄰近點的理論復(fù)雜度.雖然FPFH沒有對近鄰點所有組合進行計算,可能會導(dǎo)致重要點對的丟失,但在進行權(quán)重和鄰近點的重新計算過程中,降低了信息復(fù)雜度,增加了適用性,有效提升運算速率.
FPFH在計算Pq和其k鄰域點Pk1~Pk5,構(gòu)建每一個領(lǐng)域點的局部坐標(biāo)系,分別計算出每個k領(lǐng)域點的四元組,獲得特征直方圖,不計算領(lǐng)域點與領(lǐng)域點之間的關(guān)系,得到簡化的點特征直方圖(Simple Point Feature Histograms, SPFH).如圖3所示,分別以Pk1~Pk5作為目標(biāo)點尋找其k鄰域點并計算法向量、構(gòu)建局部坐標(biāo)系、獲得Pq和其鄰域點為目標(biāo)點的SPFH.點Pq的FPFH特征計算公式為:
(6)
式中:Pq和Pk為相鄰點;ωk是Pq和Pk的距離權(quán)重.
在式(6)中,以Pq和其鄰域點Pk之間的距離作為權(quán)重.首先獲取衛(wèi)星點云全部點的簡化特征直方圖,接著通過點云的簡化特征直方圖與鄰域點的SPFH值重新加權(quán)計算,最后得到衛(wèi)星點云的快速點特征直方圖,如圖3所示.
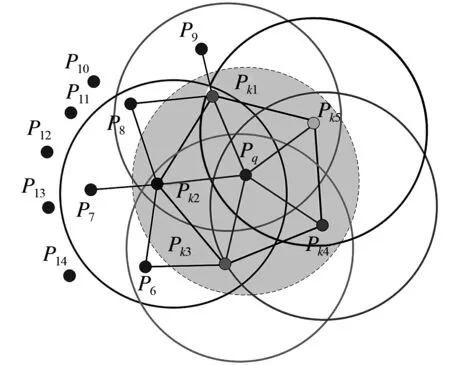
圖3 FPFH計算原理圖
計算完衛(wèi)星主體部分特征描述子之后,通過采樣一致性初始配準(zhǔn)算法(Sample Consensus Initial Aligment)來尋找兩幅衛(wèi)星點云的對應(yīng)點,從而得出旋轉(zhuǎn)平移矩陣.具體步驟如下:
(1)從待配準(zhǔn)點云A′中選取m(m>3)個采樣點,規(guī)定采樣點之間的最小距離,能保證采樣點具有不同的快速點特征直方圖特征.
(2)查找待配準(zhǔn)衛(wèi)星點云A′的點與目標(biāo)衛(wèi)星點云B′中的點具有相似的快速點特征直方圖特征,選取相似特征的點云作為待配準(zhǔn)點云與目標(biāo)點云的對應(yīng)點.
(7)
式中,ei為第i組對應(yīng)點變換之后的距離差,L為預(yù)先給定值.
3 坐標(biāo)變換
配準(zhǔn)的結(jié)果不僅要從圖像得出,也要從最后得出的平移 、旋轉(zhuǎn)數(shù)據(jù)上體現(xiàn),二者需要相輔相成,而坐標(biāo)變換也是點云配準(zhǔn)得到平移、旋轉(zhuǎn)誤差的重要途徑.本文在求初始點云跟目標(biāo)點云之間的變換經(jīng)過了兩次變換,首先是兩幅點云的主成分方向變換,然后是經(jīng)過變換后的點云配準(zhǔn)變換,所以求取初始點云與目標(biāo)點云之間的位姿變換需要對兩次變換矩陣整體求逆變換,得到的矩陣是要求取的誤差矩陣.具體流程如圖4所示.

圖4 矩陣變換流程圖
其中點云A是初始點云,點云B是目標(biāo)點云.最后配準(zhǔn)過程輸出結(jié)果是矩陣P.在矩陣變換過程中,符合下列計算規(guī)則,其中C,D,E為可逆的4×4階矩陣:
(8)
(9)
(10)
如果CD=E,那么
(11)
在矩陣進行變換時,
CD=E?C=ED-
(12)
所以根據(jù)式(12)可以得出:
P=M×N×O-
(13)
4 結(jié)果與分析
本文實驗平臺配置如表1所示.
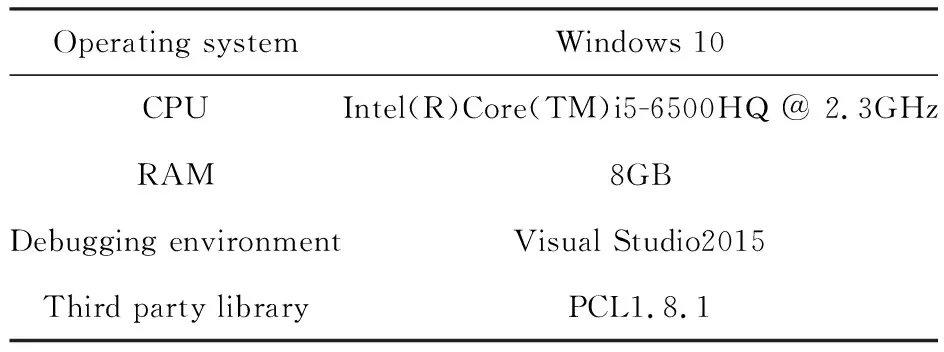
表1 系統(tǒng)環(huán)境配置
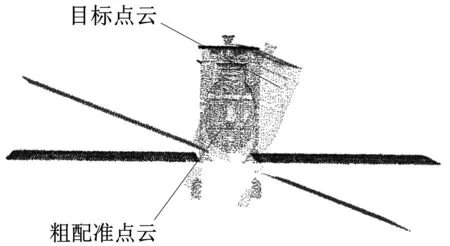
如圖5所示,采用了一組仿真數(shù)據(jù)自旋4.979章動5.103 7章動角56.68的第0幀和第5幀兩組可視點云進行實驗,兩組數(shù)據(jù)由于掃描數(shù)據(jù)時相機的站位不同,自身遮擋重疊部位點云數(shù)據(jù)無法顯示,不能得到全部點云.圖5中的原始點云數(shù)據(jù)有16 782個點,目標(biāo)點云數(shù)據(jù)有19 054個點.

圖5 輸入點云模型
由于點云數(shù)據(jù)遮擋部分不同,形成的可視點云數(shù)據(jù)對應(yīng)部分減少,增加配準(zhǔn)難度,對效率和精度影響大.首先對點云進行主成分分析,接著對點云進行變換,最后對點云進行直通濾波,圖6(a)為處理后的原始點數(shù)據(jù),圖6(b)為處理后的目標(biāo)點云數(shù)據(jù).

(a) 處理后的原始點云

(b) 處理后的目標(biāo)點云圖6 直通濾波處理后的結(jié)果
為了驗證本文算法的有效性,跟傳統(tǒng)的3DCS、4PSC、FPFH、NDT粗配準(zhǔn)算法進行比較.通過對比配準(zhǔn)前后點云模型在X、Y、Z軸的旋轉(zhuǎn)誤差和平移誤差來判定配準(zhǔn)精度,從而得出配準(zhǔn)結(jié)果.為驗證算法的有效性,控制其他閾值對配準(zhǔn)結(jié)果的影響,對仿真數(shù)據(jù)進行相同的濾波,去除離群點,進行配準(zhǔn),并記錄了不同點云配準(zhǔn)方法完成衛(wèi)星點云粗配準(zhǔn)所需的時間和平移旋轉(zhuǎn)誤差,配準(zhǔn)實驗效果如圖7所示.
(a) 3DSC配準(zhǔn)
在配準(zhǔn)效率方面,通過點云配準(zhǔn)所需要的時間來反應(yīng).實驗數(shù)據(jù)如表2所示.

表2 配準(zhǔn)時間表
在配準(zhǔn)精度方面,通過不同坐標(biāo)軸的旋轉(zhuǎn)誤差來反應(yīng),如表3和圖8所示.
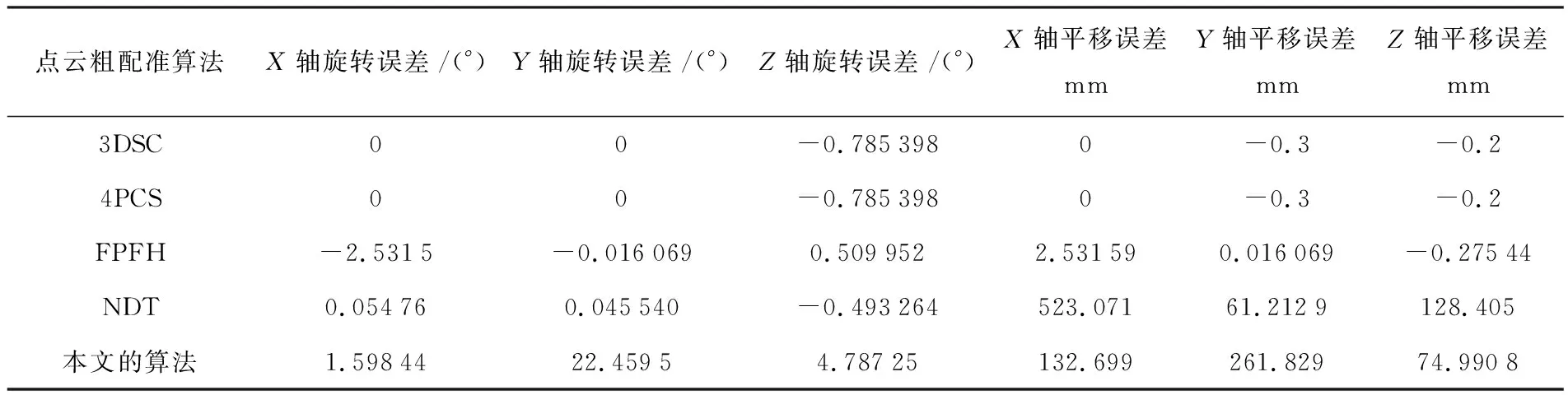
表3 誤差記錄表
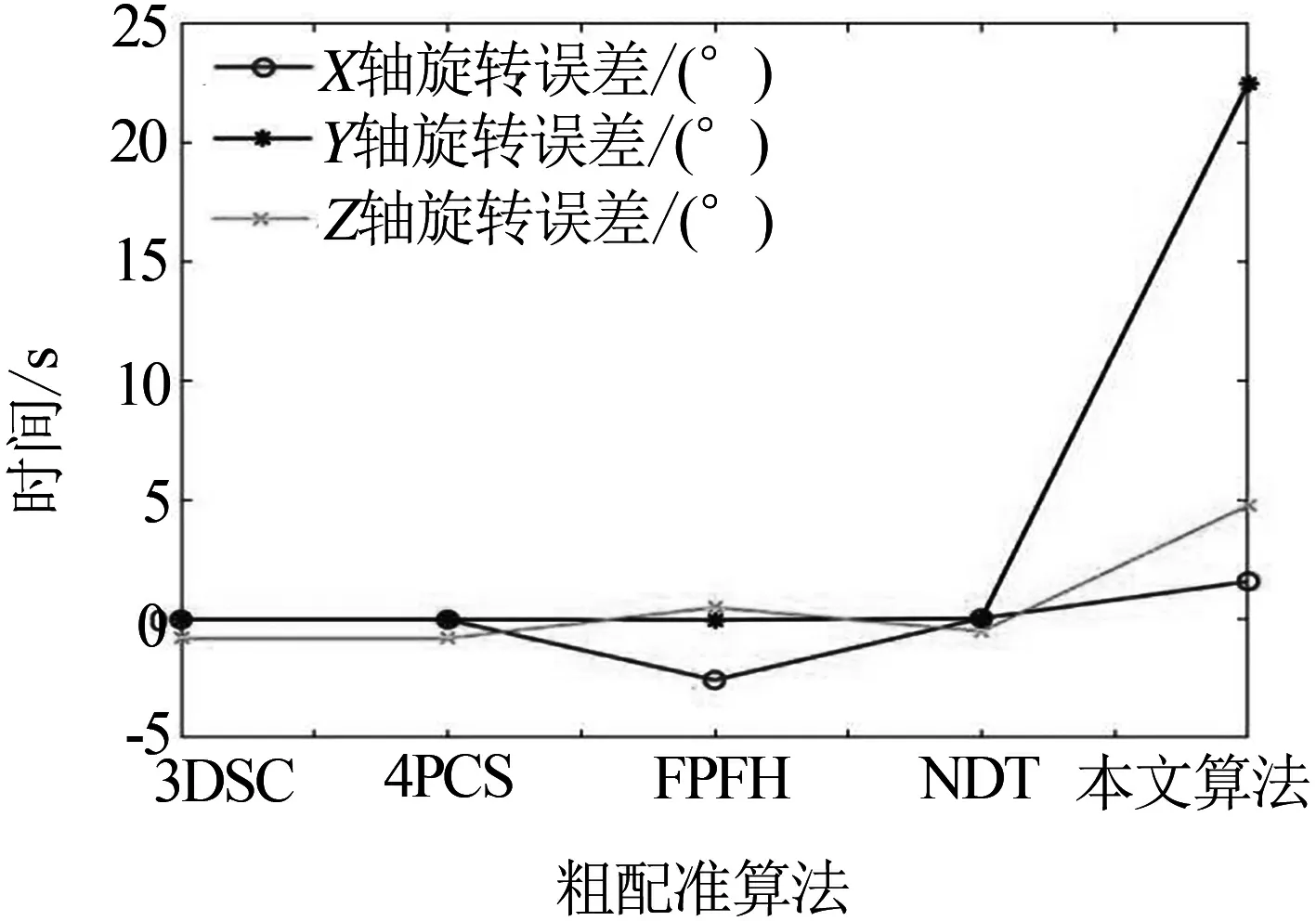
(a) 粗配準(zhǔn)旋轉(zhuǎn)誤差
在基于局部特征的描述算法中3DSC的點云配準(zhǔn)時間要明顯小于FPFH,由于快速點特征直方圖需要計算查詢點與鄰域點之間的關(guān)系,消耗時間長.3DSC需要計算出點云的曲面形狀特征,增加了計算量,由于點云的數(shù)量多,計算查詢點與領(lǐng)域點之間的關(guān)系消耗的時間要遠大于計算出點云的曲面形狀特征.衛(wèi)星點云由于曲面特征少,平面特征較多導(dǎo)致3DSC計算形狀特征配準(zhǔn)失敗;在基于全局特征的描述方法中4PCS需要計算兩幅點云共面的四點基,然后依據(jù)放射性不變的原理,進行剛體變化,衛(wèi)星模型由于其特征大多數(shù)是直面特征,導(dǎo)致計算時間短,配準(zhǔn)失敗;NDT計算正態(tài)分布是一個一次性的工作(初始化),不需要消耗大量代價計算最近鄰搜索匹配點概率密度函數(shù),在兩幅圖像采集之間的時間可以離線計算出來,配準(zhǔn)效率高,但是精度低,受點云的模型影響大;本文提出的算法雖然在前期進行點云主成分分析和坐標(biāo)變換時占用了時間,但是在后面配準(zhǔn)過程中采用直通濾波后的點云數(shù)據(jù),在保證足夠配準(zhǔn)所需的特征前提下,大大減少了點云的數(shù)量,去除部分相似特征部分,如圖8所示,在不同算法的配準(zhǔn)結(jié)果中,本文所提算法的配準(zhǔn)效果最好,能提高效率和配準(zhǔn)精度.由此可見,本文算法能夠?qū)πl(wèi)星點云,可以實現(xiàn)高精度、高效率的點云粗配準(zhǔn).
5 結(jié)論
針對衛(wèi)星目標(biāo)的幾何形狀特殊、平面特征多以及配準(zhǔn)方法適合度低等問題,本文通過對SAC-IA粗配準(zhǔn)算法的直通濾波改進,并跟傳統(tǒng)的粗配準(zhǔn)算法進行比較,本文的算法能夠有效完成衛(wèi)星點云粗配準(zhǔn)工作;3DSC和4PCS由于衛(wèi)星點云模型的特殊結(jié)構(gòu)無法完成配準(zhǔn)工作;FPFH和NDT雖然在配準(zhǔn)效率方面較高,但是其精確性較低.首先對衛(wèi)星點云的主成分分析,確定主成分方向,將點云主成分方向與Z軸重合進行坐標(biāo)變換,再對其直通濾波保留衛(wèi)星主體部分,接著對其進行粗配準(zhǔn),最后進行點云坐標(biāo)變換.這樣不僅保證點云有足夠的特征進行配準(zhǔn),而且也能夠有效防止配準(zhǔn)失敗和提高配準(zhǔn)效率.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:38
