速度相關(guān)初制導(dǎo)拐彎規(guī)律設(shè)計*
2022-06-11 01:53:04鄭國棟韋亞利
飛控與探測 2022年2期
關(guān)鍵詞:指令
鄭國棟,石 琛,韋亞利,王 磊
(1.南京理工大學(xué) 自動化學(xué)院·南京·210094;2.上海機電工程研究所·上海·201109)
0 引 言
初制導(dǎo)的任務(wù)是實現(xiàn)向目標(biāo)射向拐彎,使初制導(dǎo)段結(jié)束時刻導(dǎo)彈姿態(tài)、速度達(dá)到射向要求。而地面發(fā)射的導(dǎo)彈,初制導(dǎo)段的任務(wù)還包括完成姿態(tài)控制到過載控制的交班,一般來講,導(dǎo)彈馬赫數(shù)達(dá)到 0.8以上,認(rèn)為具有過載控制能力。文獻(xiàn)[3]針對初制導(dǎo)大拐彎,提出了一種基于最優(yōu)控制理論的最優(yōu)拐彎方法,使拐彎完成時導(dǎo)彈的末端速度最大。文獻(xiàn)[4]分析了用于垂直發(fā)射防空導(dǎo)彈初制導(dǎo)的三角型和指數(shù)型兩種導(dǎo)引控制,結(jié)果表明,指數(shù)控制律的彈道傾角誤差、最大攻角和速度損失均較小,其導(dǎo)彈交班精度更高。文獻(xiàn)[5]對便攜式紅外尋的防空導(dǎo)彈的初制導(dǎo)進(jìn)行了研究,在側(cè)向力控制條件下給出了發(fā)射時下沉的補償措施。文獻(xiàn)[6]提出了一種適合初制導(dǎo)律的剩余時間擬合方法。文獻(xiàn)[7]利用粒子群算法和變尺度法,完成了初制導(dǎo)拐彎規(guī)律的優(yōu)化。文獻(xiàn)[8]提出了一種基于自適應(yīng)滑模觀測器的終端角度約束制導(dǎo)律。文獻(xiàn)[9]應(yīng)用遺傳算法對防空導(dǎo)彈垂直發(fā)射轉(zhuǎn)彎程序進(jìn)行了優(yōu)化設(shè)計。文獻(xiàn)[10]應(yīng)用最小時間控制理論,研究了采用燃?xì)舛婵刂频姆揽諏?dǎo)彈全方位快速姿態(tài)調(diào)轉(zhuǎn)技術(shù)。
但現(xiàn)有研究大部分針對推重比大的防空導(dǎo)彈,無需考慮姿態(tài)控制切換到過載控制的速度需求,其主要工作是做到時間和能量的最優(yōu)。針對遠(yuǎn)程防空導(dǎo)彈采用推重比小的助推發(fā)動機,具有導(dǎo)彈加速慢、不同環(huán)境溫度下初制導(dǎo)段時間長且散布大等特點,為了減小初、中制導(dǎo)段交班時導(dǎo)彈飛行狀態(tài)散布,提高姿態(tài)、速度方向到位精度,本文對傳統(tǒng)防空導(dǎo)彈初制導(dǎo)拐彎規(guī)律進(jìn)行了改進(jìn)設(shè)計。
由于助推發(fā)動機推力性能散布大,導(dǎo)致初制導(dǎo)段時間散布大,因此與時間相關(guān)的拐彎規(guī)律不再適用。本文尋求一種與速度相關(guān)的拐彎規(guī)律,并針對初制導(dǎo)時間長造成重力影響速度到位精度的現(xiàn)象,給出了一種含重力補償?shù)某踔茖?dǎo)拐彎規(guī)律,用于解決初制導(dǎo)段導(dǎo)彈姿態(tài)、速度方向的精度控制問題。
1 與速度相關(guān)的拐彎規(guī)律
記錄起控開始時刻導(dǎo)彈縱軸向量(,,),求取初制導(dǎo)結(jié)束時刻期望縱軸向量(,,),則兩縱軸向量夾角為
?=arccos(++)
(1)
設(shè)計一種與速度相關(guān)的縱軸向量夾角變化規(guī)律?

(2)

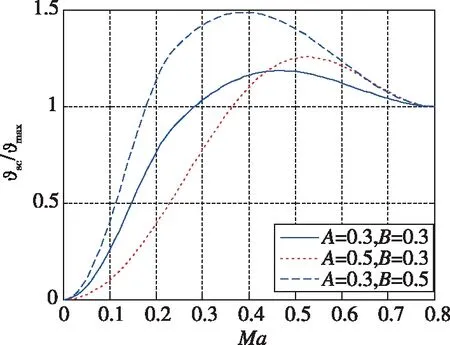
圖1 與速度相關(guān)的縱軸向量變化規(guī)律Fig.1 Regulation of y-axis vector with velocity
其中,主要影響指令上升的速度,主要影響指令的最大值。通過調(diào)節(jié)、的大小,可以調(diào)整指令變化的規(guī)律,使導(dǎo)彈在其彈體操縱性條件下,盡可能快地完成拐彎,同時避免太大的超調(diào)造成攻角超限影響其穩(wěn)定性。
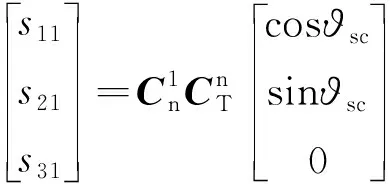
構(gòu)建一個坐標(biāo)系,使得縱軸向量的變化可以在該坐標(biāo)系的一個坐標(biāo)平面內(nèi)描述。該坐標(biāo)系的軸向量為起控開始時刻導(dǎo)彈縱軸向量(,,);軸向量(,,)垂直于兩縱軸向量組成的平面;軸向量(,,)由右手定則給出。
因此,構(gòu)建的坐標(biāo)系與地理坐標(biāo)系的轉(zhuǎn)移矩陣為
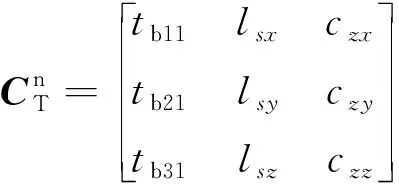
(3)

(4)
可得到彈體姿態(tài)誤差俯仰指令Δ?和偏航指令Δ
(5)
2 拐彎規(guī)律中的重力補償項
在分析重力影響時,往往將重力投影到彈道坐標(biāo)系上進(jìn)行分析。同理,進(jìn)行重力補償項設(shè)計時,也在彈道坐標(biāo)系下進(jìn)行。設(shè)計一種姿態(tài)指令?,用于補償重力
?=(,,,,)cos
(6)
(,,,,)=

(7)
其中,為彈道傾角;、、、、為設(shè)計參數(shù)。表征為了克服重力加速度而應(yīng)付出的攻角;、表征指令上升(下降)速度;、表征指令上升(下降)到最大值的一半時距開始(結(jié)束)狀態(tài)的遠(yuǎn)近。取一組參數(shù)值為例,得到重力補償項隨馬赫數(shù)變化規(guī)律,如圖2所示。
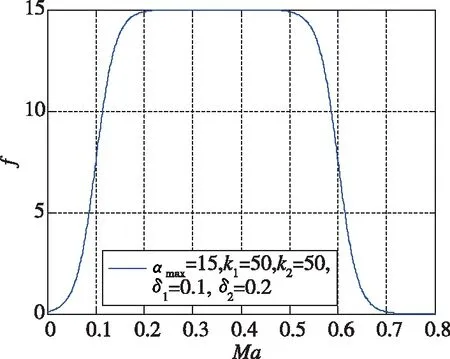
圖2 重力補償項隨速度變化規(guī)律Fig.2 Regulation of gravitational compensation with velocity
設(shè)計時應(yīng)選擇合適的參數(shù),避免起控時刻指令過大而彈體操縱性不夠引起的穩(wěn)定性下降,同時保證重力補償效果能夠消除長時間重力作用帶來的速度方向變化。

(8)
經(jīng)綜合,可以得到含重力補償項的彈體姿態(tài)誤差俯仰指令Δ?和偏航指令Δ
(9)
3 仿真校驗
為校驗含重力補償?shù)乃俣认嚓P(guān)初制導(dǎo)拐彎規(guī)律在解決助推發(fā)動機推重比小、推力性能散布大導(dǎo)致的到位精度差問題上的有效性,現(xiàn)給出仿真算例。
選取初始俯仰角70°、初始偏航角0°、初始滾轉(zhuǎn)角0°作為仿真初始條件;選取俯仰角60°、偏航角0°、滾轉(zhuǎn)角0°作為初制導(dǎo)到位條件;建立六自由度導(dǎo)彈模型進(jìn)行仿真;根據(jù)建立的仿真模型以及參數(shù)設(shè)置,仿真結(jié)果如圖3~圖5和表1所示。
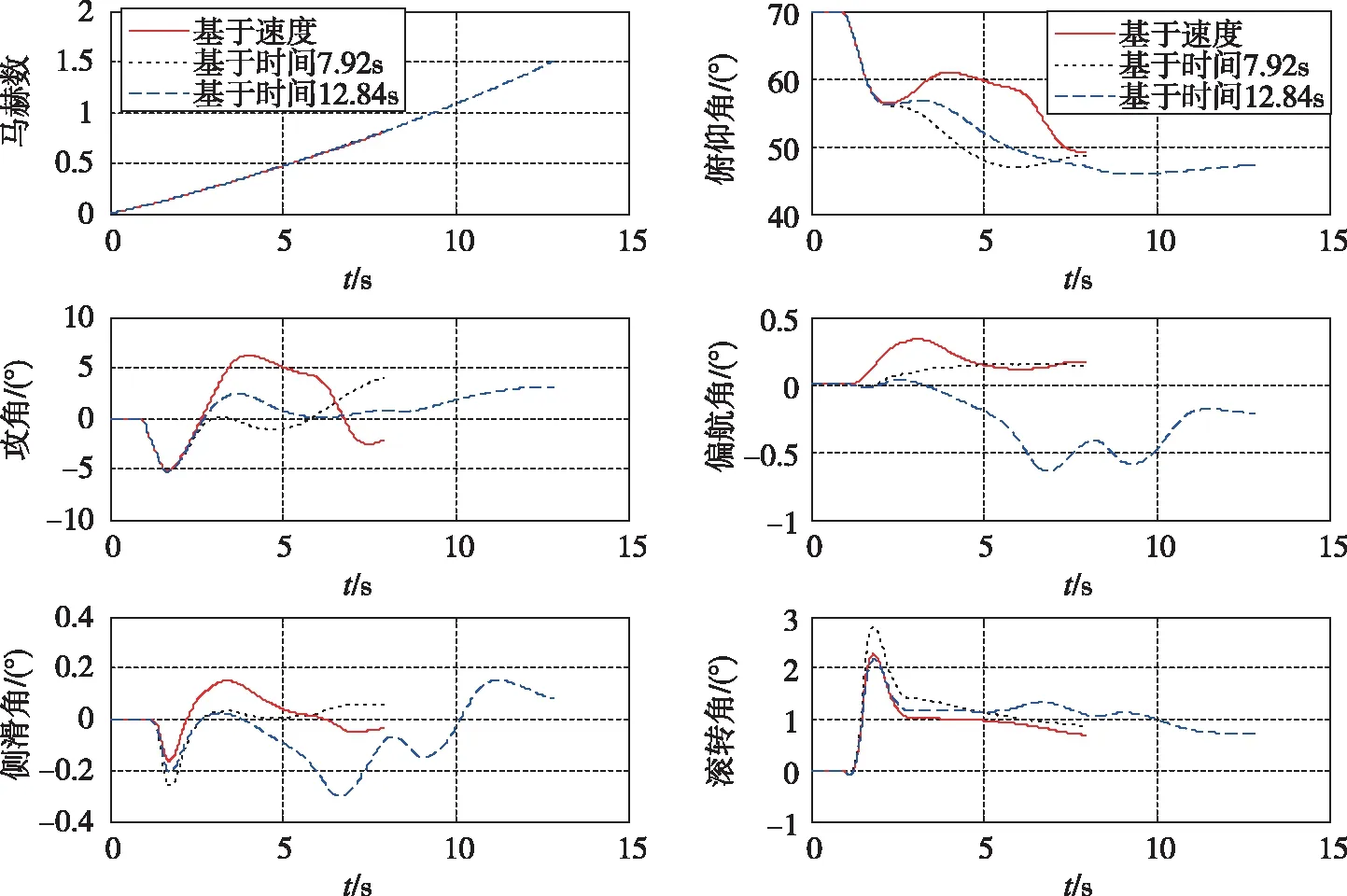
圖3 高溫條件下的導(dǎo)彈狀態(tài)Fig.3 State of the missile in the high temperature
圖4 常溫條件下的導(dǎo)彈狀態(tài)Fig.4 State of the missile in the normal temperature
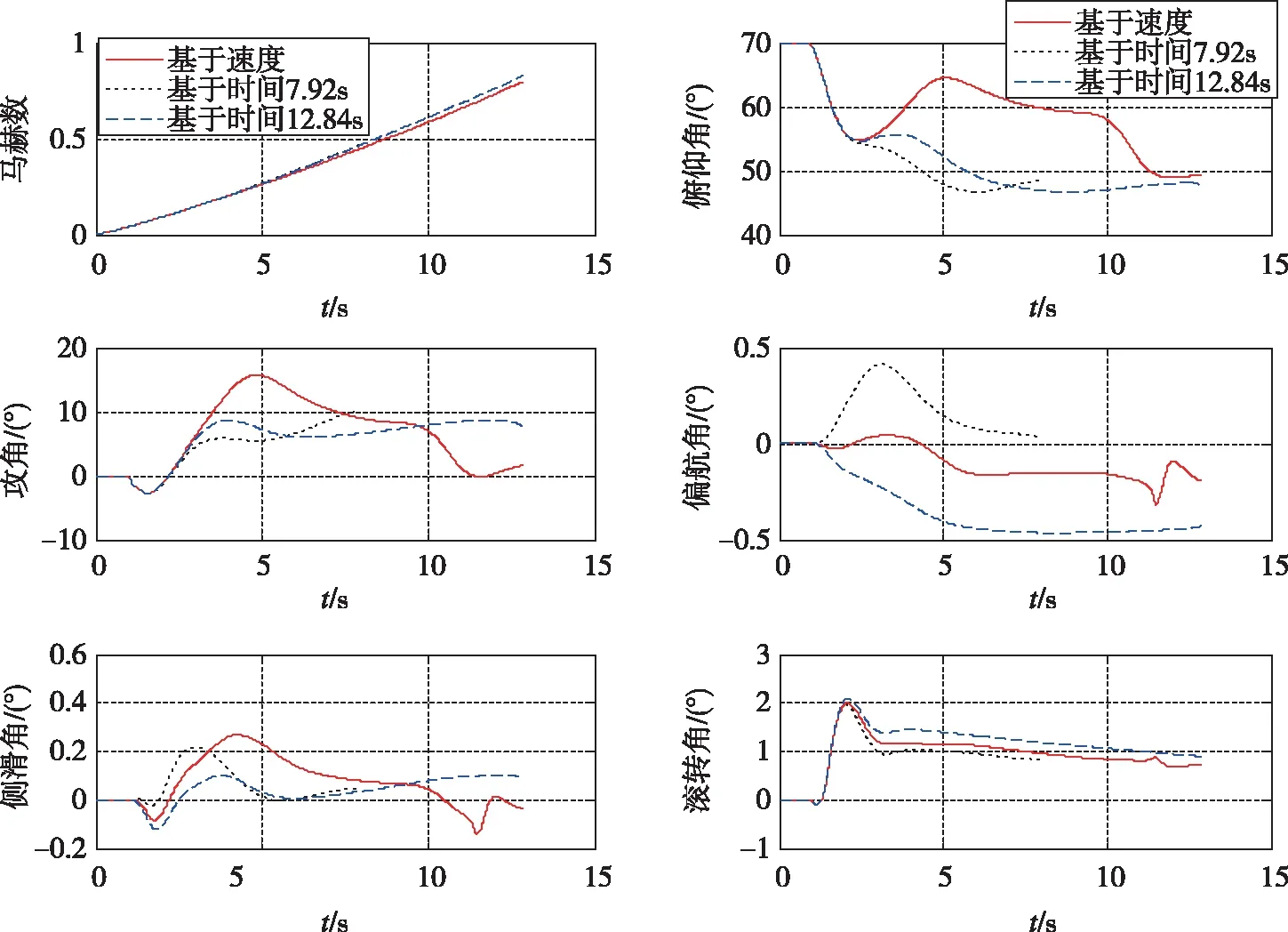
圖5 低溫條件下的導(dǎo)彈狀態(tài)Fig.5 State of the missile in the low temperature

表1 仿真結(jié)果統(tǒng)計
由仿真結(jié)果可知:
基于時間的拐彎規(guī)律,在面對發(fā)動機推力性能散布較大的條件時,初、中制導(dǎo)段交班時導(dǎo)彈狀態(tài)散布也較大。若到位時間設(shè)置較小,到位時刻速度在低溫狀態(tài)下只有馬赫數(shù)=0.47,舵效較低,不利于初、中制導(dǎo)交班。若到位時間設(shè)置較大,到位時刻速度在高溫狀態(tài)下達(dá)到馬赫數(shù)=1.50,浪費太多能量,不利于中制導(dǎo)段彈道的爬升;且初制導(dǎo)時間普遍較長,雖然姿態(tài)到位精度較好,但在重力作用下,速度到位精度差,到位時刻攻角最大達(dá)到10.14°,不利于初、中制導(dǎo)交班。
基于速度的拐彎規(guī)律在發(fā)動機高、常、低狀態(tài)下均能較好地實現(xiàn)導(dǎo)彈的到位角度;重力補償項的引入能夠有效減小到位時刻的攻角和側(cè)滑角,有利于初、中制導(dǎo)交班。
綜上,基于時間的拐彎規(guī)律雖然能實現(xiàn)導(dǎo)彈的到位角,但是其初制導(dǎo)結(jié)束時刻的攻角和馬赫數(shù)隨狀態(tài)變化較大,不利于初、中制導(dǎo)交班;基于速度加重力補償?shù)墓諒澮?guī)律不僅能實現(xiàn)導(dǎo)彈的到位角,而且其初制導(dǎo)結(jié)束時刻的攻角和馬赫數(shù)隨狀態(tài)變化較小,利于初、中制導(dǎo)交班。因此,基于速度加重力補償?shù)墓諒澮?guī)律對發(fā)動機推重比小、推力性能散布大的導(dǎo)彈初、中制導(dǎo)交班更有利。
4 結(jié) 論
本文設(shè)計了一種與速度相關(guān)的初制導(dǎo)拐彎規(guī)律,并加入重力補償項,能夠適應(yīng)助推發(fā)動機在不同環(huán)境溫度下的初制導(dǎo)拐彎要求,減小初、中制導(dǎo)段交班時導(dǎo)彈飛行狀態(tài)散布,更有利于初、中制導(dǎo)順利交班。研究成果可直接應(yīng)用于防空導(dǎo)彈初制導(dǎo)段指令設(shè)計。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
時代農(nóng)機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27