氫燃料電池發電系統交錯BOOST均流技術研究
2022-06-10 01:05:28彭根德
黑龍江電力 2022年1期
關鍵詞:控制策略
胥 良,張 碩,彭根德
(黑龍江科技大學 電氣與控制工程學院, 哈爾濱 150022)
0 引 言
隨著國民生活水平的提高,中國對綠色環保越發重視。氫燃料發電系統作為綠色能源的重要組成部分,得到了學者們廣泛關注。相較于其他傳統燃料電池,氫燃料電池的優勢在于可以將化學能直接轉換為電能,中間沒有其他轉換過程,利用率較高。且受環境影響小,設備結構簡單,安裝方便,設備起停速度快,工作過程穩定可靠,利用這一優點可以為電網提供實效的電能增減。氫燃料電池使用的燃料為氫氣,氫氣資源儲量豐富,其化學反應產生的產物為小分子的水,比燃煤發電系統更加環保。氫燃料電池的輸出特性與其連接的變換器有著密切關系,變換器是電能轉換的關鍵環節,影響氫燃料電池能量轉換的整體性能,因此性能優越的DC/DC變換器可以充分發揮燃料電池的優越性。
然而氫燃料電池的輸出電壓較低,需要通過DC/DC變換器將其產生的低電壓轉換為與直流微電網匹配的高電壓后才能向外界輸送電能[1]。通過對氫燃料電池特性的分析,在氫燃料電池發電系統中DC/DC變換器應具有寬輸入電壓范圍、穩定輸出、低輸入電流紋波、較高的升壓比并具有良好的動態特性[2]。
當DC/DC電路滿足較高的電壓增益時,需要開關器件承載較高的電流應力。開關元件承載較高的電流應力時會產生大量的熱量,降低變換器效率。嚴重時可能造成元件的損壞。為了降低開關器件的損耗且減小電流應力,對DC/DC電路進行并聯可以減小相應的電流應力,理想狀況下,并聯的變換器參數相同,電流會平均分配,但由于寄生參數存在差異,滿載時外特性斜率大的變換器輸出電流較大,輸出電流最大的變換器會率先達到保護電流閾值,引起誤操作,導致資源不能合理利用。綜上所述,采用并聯均流是變換器設計的重要環節。
1 交錯BOOST結構及分析
為了減小DC/DC變換器上開關管應力,采用具備均流技術的交錯并聯BOOST電路,如圖1所示。交錯BOOST電路主要結構包括直流源DC,兩只儲能電感L1、L2,2只開關管VT1、VT2,2只二極管D1、D2,輸出濾波電容C及負載電阻R[3]。交錯BOOST拓撲采用2只BOOST進行并聯,輸入電流被兩只BOOST變換器分配,其優點在于可以充分的減小流過開關器件的電流。但即使是相同參數的2只BOOST變換器也不能使2只變換器的電流達到平均分配。在某些特點狀態下,2只變換器流過的電流差距懸殊,因此需對交錯BOOST變換器進行精準均流,達到兩只變換器電流平均分配的目的。

圖1 交錯并聯BOOST拓撲結構Fig.1 Interleaved parallel BOOST topology
首先對DC/DC電路的工作狀態進行分析,Ug1和Ug2分別為交錯BOOST變換器2個開關管的驅動電壓,iL1和iL2分別為2只電感上的電流,iL為交錯BOOST整體輸出電流,交錯BOOST電路脈沖時序圖如圖2所示。
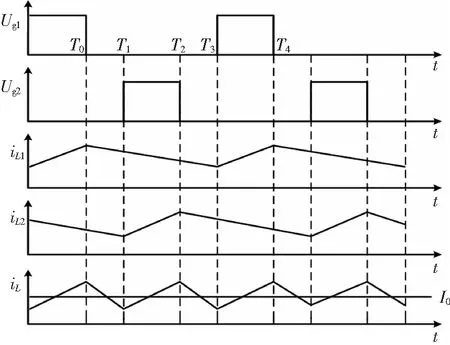
圖2 交錯并聯BOOST脈沖時序Fig.2 Interleaved parallel BOOST pulse timing
具體工作原理為:
工作過程1(0~T0):當Ug1施加驅動信號時,開關管VT1導通,電流流向為DC—L1—VT1,電感L1儲能并且電流iL1增大。Ug2無脈沖信號,開關管VT2關斷,工作過程DC—L2—D2—負載,如圖3(a)所示。
工作過程2(T0~T1):Ug1和Ug2此時都沒有驅動信號,開關管VT1和VT2全部關斷,此工作過程為DC—L1/L2—D1/D2—負載,直流電源和電感的能量同時向負載輸出,如圖3(b)所示。
工作過程3(T1~T2):當Ug2施加驅動信號時,開關管VT2導通,電流流向為DC—L2—VT2,電感L2儲能并且電流iL2增大。Ug1無脈沖信號,開關管VT1關斷,工作過程DC—L1—D1—負載,如圖3(c)所示。
工作過程4(T2~T3):Ug1和Ug2此時都沒有驅動信號,開關管VT1和VT2全部關斷,此工作過程為DC—L1/L2—D1/D2—負載,直流電源和電感的能量同時向負載輸出,如圖3(d)所示。

圖3 交錯BOOST工作原理Fig.3 Working principle of interleaved BOOST
2 交錯BOOST均流方案比較
傳統的并聯均流方式根據場合及DC/DC電路參數的不同主要分為平均電流法和最大電流法,分別有其優勢但也存在著顯著性的不足,對其原理進行系統性的分析如下:
如圖4所示,平均電流法主要通過檢測母線電流與母線電壓,當母線電流不為零時,母線電壓Ub與電流放大器輸出電壓作比較后,經過均流控制器變為Vc,調節電壓誤差放大器,得到Vf,Vf與反饋電壓Vout做比較后,通過誤差電壓來控制開關管占空比,實現均流[4]。

圖4 平均電流法Fig.4 Average current method
如圖5所示,最大電流法主要捕捉直流母線的最大電流,此結構會將其中一個并聯的模塊作為主模塊,另一個作為從模塊,最終實現均流[5]。與平均電流法相比,用二極管替換電阻,利用二極管的單向導通性,即某一模塊電源輸出電流最大時,二極管才能導通,此時電流放大器輸出電壓最大,母線電壓Ub與其做比較后,通過誤差信號調節開關管占空比。

圖5 最大電流法Fig.5 Maximum current method
3 并聯均流控制策略
平均電流法的均流結果相對準確,但當直流母線出現短路時,短路電流很大,會瞬間引起DC/DC電路產生很大的沖擊造成系統故障。最大電流法的優點主要是具備一定的抗干擾能力,但一個二極管的壓降會給系統整體造成誤差,使均流精度一定程度上受到干擾。針對上述問題提出一種新型主從雙環并聯均流控制策略,結合PID算法實現精準均流。
新型主從雙環控制器結構如圖6所示。首先檢測直流母線電壓Vout,與設定的參考電壓Vref作比較得到誤差信號,經過PI環節后調節BOOST1開關管的脈沖寬度形成電壓閉環,然后分別檢測BOOST1及BOOST2的直流電流,將BOOST1的電流作為給定值i1和BOOST2的電流i2進行比較,將誤差電流信號經過PI環節后調節BOOST2的電流迫使BOOST2的電流跟隨BOOST1的輸出電流,形成雙環控制,達到均流的目的。其優點在于實現簡單,且均流準確,只需要將BOOST1作電壓閉環,然后BOOST2作為電流閉環即可。這樣電壓作為外環,電流作為內環,實現雙環控制。

圖6 新型并聯均流控制器Fig.6 Novel parallel current sharing controller
3.1 新型并聯均流核心控制算法
結合PID算法調節2只并聯模塊開關管的脈沖寬度,最終達到穩壓并能精準均流的目的。模擬PID控制策略的一般規律如式(1)所示。
(1)
式中:U(t)為并聯控制器輸出;e(t)為母線電壓和參考電壓或兩只并聯模塊的電流誤差;Kp為變換器比例系數;Ti為變換器的積分項系數;Td為變換器微分項系數。PID調節主要通過調節上述三個系數使變換器達到穩定運行的狀態[4]。
由于上述控制為采樣控制,只能根據采樣時刻的數據來調節,因此對式(1)進行離散化處理,用數字形式的差分方程代替連續系統的微分方程 ,這時微分項和積分項可以表示為式(2)和(3)。
(2)
(3)
將式(2)和式 (3)代入式(1),則可得到離散的 PID 表達式:
P(K)=
(4)
式中:E(K)為K次采樣的誤差值;E(K-1)為K-1次采樣的誤差值;P(K)為第K次系統的輸出調節。 式(4)中只要確保采樣周期T足夠小,系統便可以得到一定的精度[5]。
4 仿真建模與波形分析
以50 kW氫燃料電池組后級DC/DC變化為模型借助Simlink仿真軟件進行模型搭建,其中輸入電壓DC 200 V,輸出電壓為500 V,輸出額定電流為100 A。未采用均流技術的交錯BOOST輸出電流如圖7(a)所示;采用新型雙環并聯均流控制器的波形如圖7(b)所示。可見2個控制器電流基本相等。單BOOST以100 A電流輸入時電流波形如圖8所示,采用新型雙環并聯均流控制器的交錯BOOST輸入電流如圖9所示,可見電流峰峰值明顯減小。采用新型雙環并聯均流控制器的交錯BOOST輸出電壓如圖10所示,可見輸出穩定電壓為500 V。

圖7 交錯BOOST電感電流波形Fig.7 Interleaved BOOST inductor current waveform

圖8 單BOOST下輸入電流波形Fig.8 Input current waveform under single boost

圖9 交錯BOOST下輸入電流波形Fig.9 Input current waveform under interleaved boost
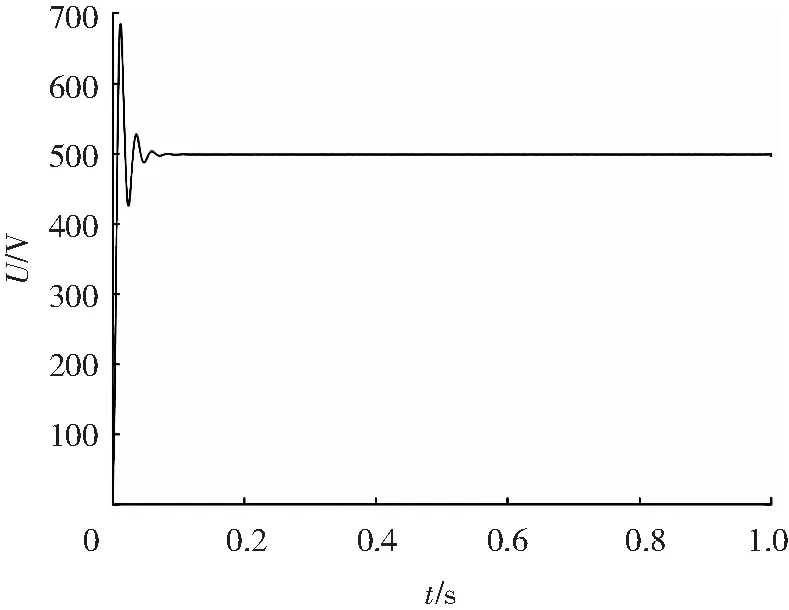
圖10 交錯BOOST下輸出電壓波形Fig.10 Output voltage waveform under interleaved boost
通過仿真結果分析采用新型雙環均流控制策略的交錯BOOST,兩只BOOST輸出電流基本一致,大大減小了開關管的電流應力,且采用新型雙環并聯均流控制策略的交錯BOOST比單只BOOST以同樣電流輸出時峰值更小。具有更小的紋波電流。輸出電壓穩定最大超調量不超過700 V,穩定時間約為0.1 s。綜上所述,對交錯BOOST采用新型雙環并聯均流控制策略可以更好的應用到氫燃料電池發電系統DC/DC變換器上,充分發揮氫燃料電池的優勢。
5 結 語
該文提出一種新型雙環并聯均流控制策略的交錯BOOST,通過仿真驗證,較好地解決了交錯并聯BOOST中電流不一致的問題,輸入電流紋波小,滿足氫燃料電池發電系統對DC/DC變換的技術要求,實現了預期目標。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
