軋機(jī)伺服控制系統(tǒng)穩(wěn)定性研究
2022-06-10 01:39:16趙景泉
冶金設(shè)備 2022年1期
趙景泉
(山東鋼鐵股份有限公司萊蕪分公司煉鋼廠 山東 萊蕪 271104)
1 前言
目前,厚度控制已成為現(xiàn)代化板帶生產(chǎn)中最重要的組成部分,其關(guān)鍵技術(shù)是高精度的板厚控制和板形控制。板厚的精度關(guān)系到材料的節(jié)約、產(chǎn)品的重量以及強(qiáng)度等性能,為了獲得高精度的產(chǎn)品質(zhì)量,軋機(jī)AGC系統(tǒng)必須具有高精度的板厚控制系統(tǒng)[1]。
液壓伺服系統(tǒng)在一些工業(yè)應(yīng)用中非常廣泛,如工業(yè)機(jī)器人、航空航天飛行控制器、重型機(jī)械、飛機(jī)、汽車工業(yè)和各種自動(dòng)化制造系統(tǒng)。液壓伺服系統(tǒng)能夠產(chǎn)生高功率和準(zhǔn)確快速的反應(yīng)。然而,由于壓力流量特性和伺服閥的內(nèi)泄漏等,這些系統(tǒng)具有較高的非線性,使得精確輸出跟蹤的控制設(shè)計(jì)成為一項(xiàng)非常具有挑戰(zhàn)性的任務(wù)[2]。
實(shí)際中已經(jīng)廣泛使用PID線性控制器、輸入/輸出線性化控制器和滑模控制器來(lái)控制液壓伺服系統(tǒng)[3]。然而,這些控制器是基于物理模型設(shè)計(jì)的,需要了解設(shè)備參數(shù),因此這些控制器對(duì)不確定的擾動(dòng)和負(fù)載變化不敏感,導(dǎo)致控制性能的下降。
為了提高控制器的性能,研究人員已經(jīng)采用了幾種策略,如使用自適應(yīng)的PID控制器和非線性自適應(yīng)控制器,并進(jìn)行了一些改進(jìn)。使用滑模控制方法與自適應(yīng)控制器相結(jié)合,可以對(duì)系統(tǒng)中存在的不確定因素進(jìn)行估計(jì),消除不確定因素對(duì)系統(tǒng)的影響,提高系統(tǒng)的控制性能和魯棒性[4]。
2 軋機(jī)AGC控制原理
軋機(jī)AGC控制系統(tǒng)主要用于消除出口厚差,利用軋機(jī)后的測(cè)厚儀,檢測(cè)實(shí)際軋出厚度,與給定目標(biāo)厚度相比,得到實(shí)際厚度偏差,對(duì)輥縫進(jìn)行修正,使出口厚度達(dá)到目標(biāo)值[5]。并用此偏差信號(hào)去控制壓下進(jìn)行厚度控制,原理如圖1所示。
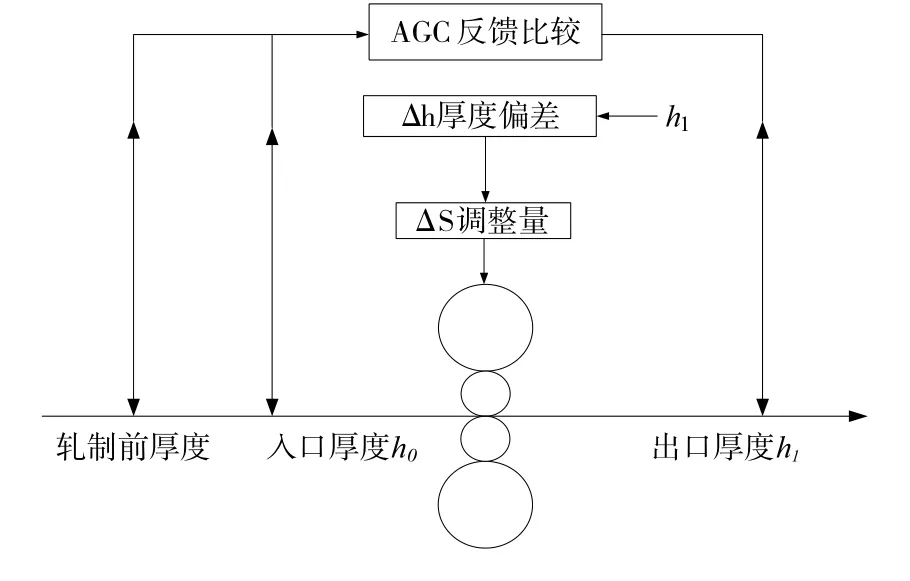
圖1 軋機(jī)AGC控制原理示意圖
機(jī)架前設(shè)置測(cè)厚儀、激光測(cè)速儀,在機(jī)架后設(shè)置激光測(cè)速儀。其基本原理為:在任一瞬間,進(jìn)入和離開(kāi)軋機(jī)的帶鋼體積保持不變[6],即:

式中:h,b,v—分別為帶材的厚度、寬度和速度。
在冷軋過(guò)程中,帶材的寬度不變,即b0=b1,如果考慮厚度偏差,則有:

因此,可以得到出口厚度偏差為:

得到出口厚度偏差后,則由AGC系統(tǒng)控制液壓缸對(duì)輥縫進(jìn)行調(diào)節(jié),調(diào)節(jié)位移量如下[7]。

式中:ΔS—液壓缸調(diào)節(jié)位移量;
K—軋機(jī)剛度系數(shù);
M—帶材的塑性系數(shù)。
3 軋機(jī)AGC伺服控制系統(tǒng)建模
板帶材生產(chǎn)過(guò)程中,軋制系統(tǒng)是一個(gè)典型的非線性系統(tǒng)。作為保證帶鋼出口厚度精度的前提,應(yīng)保證系統(tǒng)是具有魯棒穩(wěn)定性的[8]。軋機(jī)液壓伺服系統(tǒng)示意圖如圖2所示,由伺服放大器、伺服閥、液壓缸和位置傳感器組成,質(zhì)量彈簧系統(tǒng)是一個(gè)外部負(fù)荷,和伺服閥驅(qū)動(dòng)液壓缸的運(yùn)動(dòng),它本身被控制,以保持液壓缸的位移盡可能接近所需值[9]。
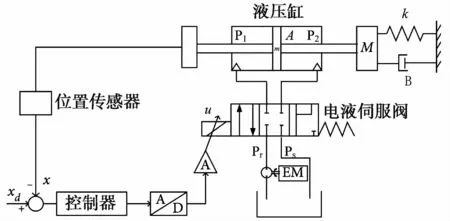
圖2 軋機(jī)伺服控制系統(tǒng)示意圖
為了使閥控非對(duì)稱缸的模型簡(jiǎn)單直觀,在建立系統(tǒng)數(shù)學(xué)模型時(shí)假設(shè)液壓油相關(guān)參數(shù)為理想狀態(tài):假定伺服閥為理想零開(kāi)口四通滑閥,4個(gè)節(jié)流口是對(duì)稱的;閥中的液壓油的壓縮性影響可以忽略不計(jì);伺服閥具有理想的響應(yīng)能力,閥芯的位移、閥壓降的變化所產(chǎn)生的流量變化能在瞬間發(fā)生;供油壓力恒定,回油壓力為零;液壓缸中油液溫度和容積彈性模量可看作常數(shù)[10]。經(jīng)過(guò)推導(dǎo)可得出電液伺服閥的傳遞函數(shù)如下。

式中:I—伺服閥控制電流;
Xv—伺服閥的閥芯位移;
Ksv—伺服閥增益系數(shù);
ωsv—伺服閥固有頻率;
ζv—伺服閥阻尼比系數(shù)。
由于伺服放大器的高動(dòng)態(tài)響應(yīng)和轉(zhuǎn)折頻率,因此可以近似為比例元件,其傳遞函數(shù)表達(dá)式如下。

式中:Ka—伺服放大器增益;
I(S)—伺服放大器出電流;
U(S)—伺服放大器輸入電壓。
液壓缸位移傳感器的功能是將液壓缸活塞桿的位置信號(hào)轉(zhuǎn)換為相應(yīng)的電壓信號(hào),也可簡(jiǎn)化為比例元件,傳遞函數(shù)如下。

式中:V0—輸出電壓;
x—液壓缸活塞桿位移;
Kf—比例系數(shù)。
可以得到電液伺服閥控液壓缸系統(tǒng)傳遞函數(shù)的框圖,d(t)為擾動(dòng),如圖3所示。
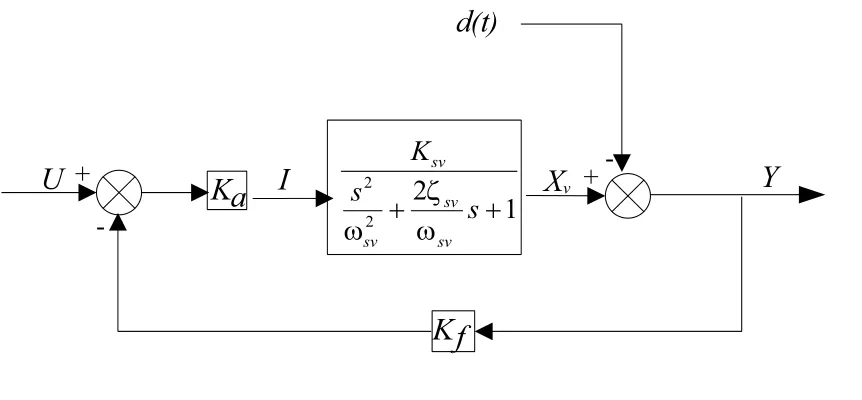
圖3 閥控缸傳遞函數(shù)框圖
以三種可變狀態(tài)來(lái)描述軋機(jī)液壓伺服系統(tǒng),用差壓狀態(tài)代替液壓缸兩腔的壓力。液壓缸兩側(cè)面積相等,忽略誤差時(shí)兩側(cè)的流量是相同的,可以建立軋機(jī)伺服系統(tǒng)的狀態(tài)表達(dá)式如下。
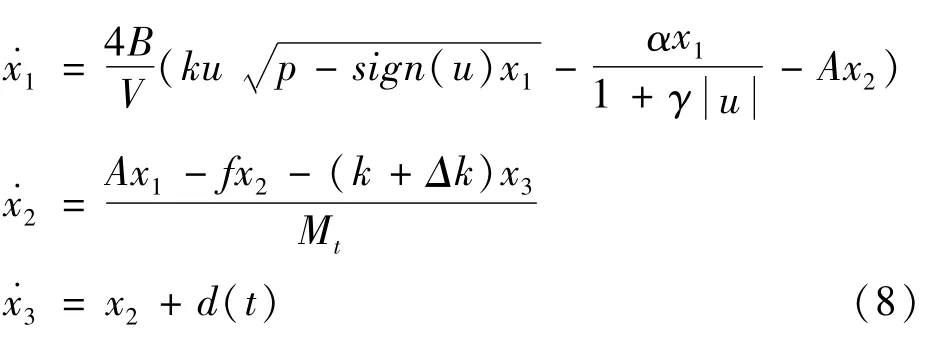
式中:x1—液壓缸兩腔壓力差;
x2—液壓缸活塞桿速度;
x3—液壓缸活塞桿位置;
B—油液體積彈性模量;
V—液壓缸兩側(cè)體積之和;
P—伺服閥進(jìn)油口和回油口壓力差;
α、λ—伺服閥內(nèi)泄漏的固有常數(shù);
A—液壓缸活塞有效面積;
Mt—活塞桿與負(fù)載質(zhì)量之和;
k—伺服閥的增益;
Δk、f—分別為k的不確定變化量和摩擦系數(shù);
u—伺服閥控制信號(hào);
d(t)—擾動(dòng)量。
4 滑模控制器設(shè)計(jì)
系統(tǒng)模型中最困難的方面是存在確定的擾動(dòng)和擾動(dòng)參數(shù)不確定性。此外,泄漏模型相對(duì)于控制信號(hào)是非線性,而且設(shè)計(jì)中忽略了泄漏,為了解決這個(gè)問(wèn)題,使用滑模方法是一個(gè)很好的選擇,滑模控制器可以驅(qū)動(dòng)液壓缸使得活塞桿到達(dá)指定的位置x3r。
令x1=p(x),為了確保對(duì)不確定性擾動(dòng)參數(shù)的魯棒性,設(shè)計(jì)出變量結(jié)構(gòu)的虛擬控制器如下。

式中:C2、C3—控制參數(shù)。
根據(jù)狀態(tài)方程式可以得出滑模表達(dá)式如下。

在滑模方式下,如果忽略了不確定性和擾動(dòng),該系統(tǒng)是一個(gè)具有特征方程的二階線性系統(tǒng)。

利用極點(diǎn)放置法,并在s=-λ上施加一個(gè)穩(wěn)定的多極點(diǎn),可以確定控制參數(shù)C2、C3值如下。

選擇滑動(dòng)面為σ1(x2,x3)如下。

式中:Wi(i=1,2,3,4)—滑模增益。
當(dāng)σ1(x2,x3)=0時(shí),則有x2=v(x3),在滑模方式下,可以得出下式。

當(dāng)x3(t)→x3r時(shí),可以得出滑模面表達(dá)式如下。

根據(jù)上述滑模面表達(dá)式和推導(dǎo),可以得出滑模控制器如下。
式中:N(x)表達(dá)式如下。
設(shè)置相關(guān)參數(shù)經(jīng)過(guò)仿真,得出在此控制器下的液壓缸輸出各參數(shù),如圖4所示。
圖4 滑模控制下液壓缸輸出參數(shù)
5 狀態(tài)觀測(cè)器設(shè)計(jì)
設(shè)計(jì)的控制器使用了三個(gè)狀態(tài)變量。然而,由于泄露的不可避免性,測(cè)量壓差是很難實(shí)現(xiàn)的。狀態(tài)觀測(cè)器可以將軋機(jī)液壓伺服位置系統(tǒng)中的不確定參數(shù)、擾動(dòng)和非線性參數(shù)等干擾,通過(guò)選滑模觀測(cè)器對(duì)其進(jìn)行逼近估計(jì),并將輸出的估計(jì)值引入到設(shè)計(jì)的控制器中進(jìn)行補(bǔ)償[11]。為了糾正這種情況,根據(jù)軋機(jī)伺服系統(tǒng)狀態(tài)表達(dá)式設(shè)計(jì)了狀態(tài)觀測(cè)器,可以用于估計(jì)控制器的狀態(tài),狀態(tài)觀測(cè)器表達(dá)式如下[12]。
式中:Li(i=1,2,3)—狀態(tài)觀測(cè)器增益。
為了證明觀察器的效率,以及在存在擾動(dòng)和不確定性的情況下也可以實(shí)現(xiàn)精確的定位,經(jīng)過(guò)仿真得出液壓缸活塞桿的兩腔壓差、活塞桿速度、活塞桿位置的反饋值與實(shí)際值對(duì)比,如圖5所示,顯示出了觀測(cè)器狀態(tài)估計(jì)的跟蹤效果。

圖5 狀態(tài)觀測(cè)器下液壓缸輸出與反饋
6 結(jié)論
普通閉環(huán)控制器對(duì)于擾動(dòng)不能達(dá)到理想的魯棒性。滑模理論是處理不確定性擾動(dòng)條件下保證系統(tǒng)穩(wěn)定運(yùn)行最實(shí)用的方法,基于滑模控制理論設(shè)計(jì)了控制器,目標(biāo)是在不確定性擾動(dòng)下,保證液壓伺服系統(tǒng)的穩(wěn)定性,并驗(yàn)證了其控制效果。最終設(shè)計(jì)了一個(gè)魯棒的滑模狀態(tài)觀測(cè)器,以便用未測(cè)量的估計(jì)值來(lái)代替其狀態(tài)。通過(guò)仿真表明,由控制器發(fā)出的狀態(tài)估計(jì)實(shí)現(xiàn)了穩(wěn)定的位置跟蹤。
