基于邊緣計算與深度學(xué)習(xí)的禽舍監(jiān)測系統(tǒng)設(shè)計
2022-06-09 04:38:06楊東軒吳葉蘭張剛剛劉碩
江蘇農(nóng)業(yè)科學(xué) 2022年9期
關(guān)鍵詞:深度學(xué)習(xí)
楊東軒 吳葉蘭 張剛剛 劉碩








摘要:惡臭氣體是影響禽舍內(nèi)禽類個體健康和產(chǎn)蛋效率的重要因素。由于傳統(tǒng)的監(jiān)測設(shè)備具有較長的氣體濃度響應(yīng)時間,導(dǎo)致無法及時對污染物的排放做出檢測,設(shè)計并實現(xiàn)可以預(yù)測氨氣濃度變化的禽舍監(jiān)測系統(tǒng),選用低成本的電化學(xué)傳感器和低功耗Wi-Fi微控制器設(shè)計終端監(jiān)測器。為了克服電化學(xué)傳感器易受其他環(huán)境因素影響的缺點(diǎn),監(jiān)測器還集成硫化氫濃度、二氧化碳濃度以及溫濕度等傳感器。由于禽舍生產(chǎn)經(jīng)營屬性對成本較敏感,選用性價比較高的邊緣計算硬件作為服務(wù)器。在該服務(wù)器對監(jiān)測器上傳的采集數(shù)據(jù)進(jìn)行預(yù)處理,最終通過提出的Bi-LSTM模型使用多傳感器參數(shù)預(yù)測未來一段時間內(nèi)氨氣的濃度值。經(jīng)過參數(shù)調(diào)優(yōu)和對比訓(xùn)練,該系統(tǒng)對禽舍內(nèi)氨氣濃度的預(yù)測值與采集值均方誤差僅為3.29%,以期為接下來的減排措施提供有效的數(shù)據(jù)支撐。
關(guān)鍵詞:深度學(xué)習(xí);邊緣計算;禽舍環(huán)境;氨氣濃度監(jiān)測;電路設(shè)計
中圖分類號:TP277 ??文獻(xiàn)標(biāo)志碼: A
文章編號:1002-1302(2022)09-0219-07
禽類的產(chǎn)蛋效率容易受多種環(huán)境因素影響[1]。采用智能化的監(jiān)控系統(tǒng)對禽舍內(nèi)的空氣質(zhì)量、溫濕度以及污染氣體進(jìn)行監(jiān)測,可有效促進(jìn)禽類養(yǎng)殖的現(xiàn)代化[2]。傳統(tǒng)的禽舍監(jiān)測系統(tǒng)通過獨(dú)立的氨氣、硫化氫和二氧化碳等傳感器實時采集環(huán)境參數(shù),然后將采集到的數(shù)據(jù)發(fā)送給服務(wù)器并呈現(xiàn)給用戶查看[3-5]。由于氣體傳感器普遍存在響應(yīng)時間這一固有特點(diǎn)[6],因此用戶或減排系統(tǒng)所獲取的采集值會與實際值之間相差一段時間,及時判斷污染氣體的濃度可有效提高禽類的動物福利和生存率。段文杰等探究云計算技術(shù)在禽類養(yǎng)殖過程中的經(jīng)營管理辦法,為集約化和規(guī)模化的養(yǎng)殖提供新思路,但該研究并未提出在禽類養(yǎng)殖過程中的有效監(jiān)測方案[7]。姬舒等構(gòu)建了禽舍環(huán)境的智能化數(shù)據(jù)監(jiān)測和減排控制系統(tǒng)[8],但該類系統(tǒng)僅將監(jiān)測數(shù)據(jù)作為控制系統(tǒng)的輸入變量,并未分析該數(shù)據(jù)的變化趨勢,因此具有一定的滯后性。環(huán)境數(shù)據(jù)的預(yù)測已在其他環(huán)境監(jiān)測系統(tǒng)中進(jìn)行研究,曾志雄等使用門控循環(huán)單元(GRU)網(wǎng)絡(luò)對豬舍溫度進(jìn)行預(yù)測[9];楊亮等基于長短記憶網(wǎng)絡(luò)(long short term memory,LSTM)模型和多環(huán)境參數(shù)預(yù)測豬舍的氨氣濃度[10]。
深度學(xué)習(xí)模型在圖像和語義等方面有著顯著的應(yīng)用效果[11-12],而禽舍內(nèi)的環(huán)境數(shù)據(jù)是受多種外界因素而變化的時序數(shù)據(jù)。為了解決禽舍內(nèi)存在的污染物監(jiān)測不及時和監(jiān)控成本過高等問題,本研究提出的深度學(xué)習(xí)模型以Bi-LSTM為基礎(chǔ),使用無線檢測器采集的氨氣濃度、硫化氫濃度、二氧化碳濃度、溫度和濕度的時間序列值作為輸入變量,對未來15 min內(nèi)的氨氣濃度進(jìn)行預(yù)測。同時,為了降低成本,選用電化學(xué)傳感器和低功耗Wi-Fi無線微控制器,設(shè)計傳感器采集終端。通過對比包括樹莓派在內(nèi)的5種邊緣計算硬件,選擇性價比最優(yōu)的硬件作為計算服務(wù)器。
1 系統(tǒng)架構(gòu)
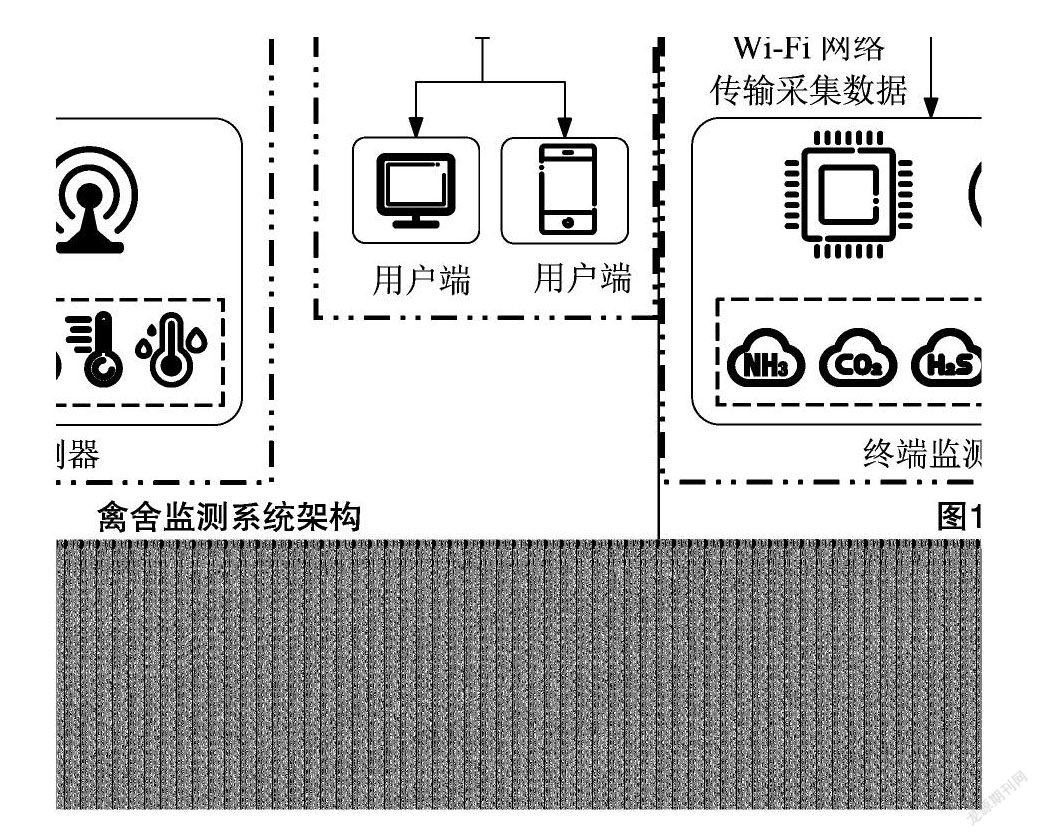
禽舍監(jiān)測系統(tǒng)從功能上可以分為數(shù)據(jù)感知層、邊緣計算層和數(shù)據(jù)展示層。數(shù)據(jù)感知層主要由終端監(jiān)測器和2.4 GHz無線網(wǎng)絡(luò)構(gòu)成。傳感器終端以基于Cortex-M4內(nèi)核的CC3200無線微控制器作為核心處理器,通過片上的A/D模數(shù)轉(zhuǎn)換接口讀取氣體濃度和電池電壓,通過I2C、GPIO等數(shù)字接口配置傳感器的運(yùn)行參數(shù)。邊緣計算層以樹莓派單板計算機(jī)作為硬件載體,通過禽舍內(nèi)的Wi-Fi無線網(wǎng)絡(luò)接收感知層采集的底層傳感器數(shù)據(jù)。以長短記憶網(wǎng)絡(luò)(long short term memory,LSTM)作為深度學(xué)習(xí)模型,通過氨氣濃度、硫化氫濃度、二氧化碳濃度以及溫濕度的歷史數(shù)值訓(xùn)練該模型,最終實現(xiàn)氨氣濃度的預(yù)測。數(shù)據(jù)展示層運(yùn)行于云托管服務(wù)器,通過邊緣計算層推送的運(yùn)算結(jié)果數(shù)據(jù),向用戶端提供數(shù)據(jù)獲取服務(wù)。由于大量計算已在邊緣服務(wù)器上運(yùn)行,因此云端服務(wù)器所需算力較小,用戶無需支付高昂的計算費(fèi)用(圖1)。
2 采集終端設(shè)計
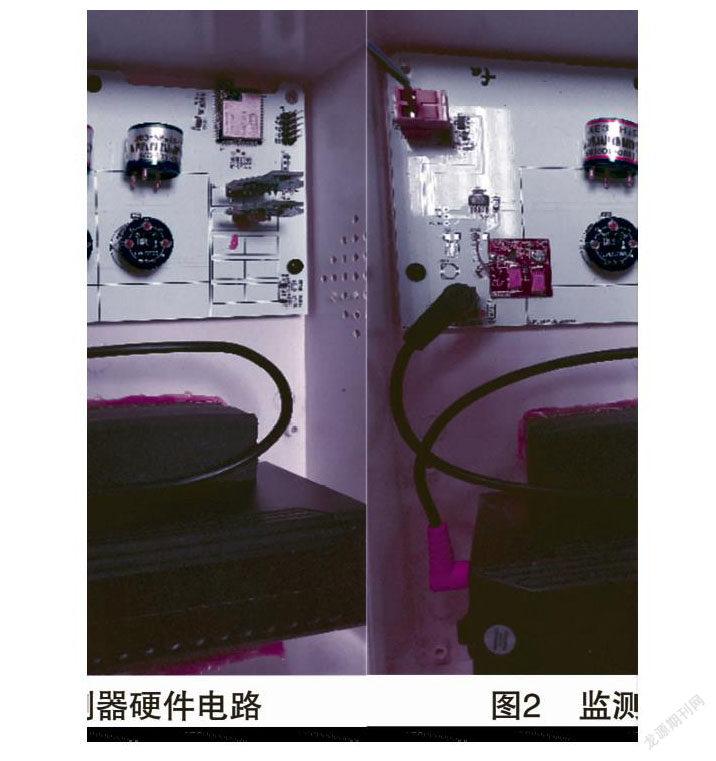
終端監(jiān)測器的硬件主要由電化學(xué)傳感器電路和無線微控制器電路構(gòu)成。前者負(fù)責(zé)氨氣和硫化氫傳感器的前端模擬信號采集和調(diào)理;后者主要負(fù)責(zé)其余傳感器的數(shù)據(jù)采集、無線數(shù)據(jù)收發(fā)以及其他邏輯控制(圖2)。
2.1 傳感器硬件電路
2.1.1 傳感器選型
設(shè)計一種適用于禽舍的環(huán)境采集終端,其首要任務(wù)就是挑選合適的氨氣濃度傳感器。基于光學(xué)原理的檢測方法具有精度高和響應(yīng)快的優(yōu)點(diǎn),其檢測靈敏度通常可達(dá)到1 g/m3級別[13],但該方案一般用于實驗室環(huán)境且造價昂貴。基于氣敏半導(dǎo)體、電化學(xué)EC(electrochemistry)和金屬氧化物半導(dǎo)體(metal oxide semiconductor,MOS)的氨氣濃度傳感器是各類電子檢測儀的主要選擇。本研究分別選擇型號為MQ-137(氣敏半導(dǎo)體型,鄭州煒盛電子科技有限公司)、ME3-NH 3(EC型,鄭州煒盛電子科技有限公司)和MiCS-5914[MOS型,艾知傳感器(上海)有限公司]的氨氣濃度傳感器作為試驗對象,在響應(yīng)時間T 90、相對誤差(relative error,RE)以及價格范圍綜合考察。使用3組同樣尺寸的PVC材質(zhì)氣密箱作為氣室,分別使用5、25 mg/m3 濃度的氨氣標(biāo)準(zhǔn)氣體以恒定的流速導(dǎo)入到氣室,測試每組傳感器由初始上電狀態(tài)到數(shù)值輸出穩(wěn)定時所用的時間,并記錄每組傳感器達(dá)到穩(wěn)態(tài)時的測量值。根據(jù)公式(1)計算每組傳感器的相對誤差。備選傳感器的對比結(jié)果見表1,其中包含傳感器廠家給出的參數(shù)和本試驗所得的相對誤差數(shù)據(jù)。
RE=|C S-C T|C S×100。(1)
式中:RE表示相對誤差,%;C S表示標(biāo)準(zhǔn)氣體濃度,mg/m3;C T表示傳感器測量濃度,mg/m3。
綜合比較可知,基于EC原理的ME3-NH 3型氨氣濃度傳感器適用于本方案的設(shè)計,該傳感器相比光學(xué)傳感器具有低成本、低功耗的優(yōu)勢,且該傳感器與其他電子傳感器相比具有響應(yīng)速度適中、相對誤差低等優(yōu)勢。使用相同的試驗對比方法,選擇同為EC原理的ME3-H 2S作為硫化氫濃度傳感器。選擇基于MEMS的SGP30作為二氧化碳傳感器,選擇SHT31作為溫濕度傳感器,二者均可以通過數(shù)字I2C接口獲取傳感器數(shù)據(jù),無需設(shè)計復(fù)雜的預(yù)處理電路,且不要求微處理器具有高精度的A/D轉(zhuǎn)換模塊。
2.1.2 信號處理電路
電化學(xué)傳感器ME3-NH 3為3端引腳結(jié)構(gòu),分別為R極(參考電極)、S極(傳感電極)和C極(負(fù)電壓極),傳感器內(nèi)部通過與氨氣發(fā)生一系列氧化還原反應(yīng)來產(chǎn)生與濃度成比例的電流[14]。對于電化學(xué)傳感器,傳統(tǒng)的信號處理電路由3個部分構(gòu)成:恒電位模塊、電流電壓轉(zhuǎn)換電路以及短路模塊。使用分散元器件構(gòu)建該電路時需要注意器件的選型,應(yīng)使用具有低輸入偏置電流和低輸入噪聲的運(yùn)放;R Gain(增益電阻)應(yīng)具有高精度且低溫漂特性;R Load(負(fù)載電阻)的取值范圍為10~33 Ω,取值越高,降噪效果越好,但氣體濃度檢測的響應(yīng)時間也越長。為了精簡電路設(shè)計和降低成本,本研究采用型號為LMP91000的電化學(xué)模擬前端(AFE)IC代替分散電路方案。電路設(shè)計見圖3,AFE芯片內(nèi)部除了集成有用于處理模擬信號的恒電位和電流轉(zhuǎn)換電路,還包含可編程的偏置電壓、可編程的跨組運(yùn)放增益模塊以及數(shù)字通信接口,且其內(nèi)部集成有場效應(yīng)管短路特性,因此無需額外設(shè)計短路模塊。得益于AFE的可編程特性,硫化氫濃度傳感器ME3-H 2S同樣使用該設(shè)計方案,只需在系統(tǒng)運(yùn)行時通過I2C接口為其配置不同的偏置電壓和跨組增益即可。得益于I2C接口的可擴(kuò)展性,該設(shè)計將信號處理電路設(shè)計為獨(dú)立硬件模塊,若對該模塊進(jìn)行升級則無需重新設(shè)計主體硬件電路。
2.2 CC3200核心模塊電路
自組網(wǎng)芯片方案常被用于無線傳感器的設(shè)計[15],該方案的優(yōu)點(diǎn)是在不確定地形的監(jiān)測環(huán)境中輕松實現(xiàn)大覆蓋范圍的組網(wǎng)。而在面積有限且確定的禽舍環(huán)境中,監(jiān)測器到數(shù)據(jù)網(wǎng)關(guān)之間的距離較近,且不需要多跳轉(zhuǎn)發(fā),因此使用基于Wi-Fi的無線微處理器便于直接利用已有的2.4 GHz路由器進(jìn)行數(shù)據(jù)通信。羅俊等使用單獨(dú)的Wi-Fi芯片和微控制器分別實現(xiàn)了收發(fā)數(shù)據(jù)和采集數(shù)據(jù)[16],但電路設(shè)計較復(fù)雜。使用集成有Wi-Fi收發(fā)器和 Cortex-M4 內(nèi)核微控制器的CC3200芯片可以有效地降低設(shè)計復(fù)雜度和運(yùn)行功耗[17]。圖4為無線微控制器的核心電路,相比于傳統(tǒng)微控制器,無線微控制器在收發(fā)無線數(shù)據(jù)時會給DC-DC電路引入較大的噪聲,因此要優(yōu)先考慮去耦電容的布局以及電源的走線位置。在處理器引腳的設(shè)計上選用1對I2C數(shù)字總線與下掛的所有傳感器進(jìn)行通信,可大幅節(jié)約引腳占用。該數(shù)字總線用于獲取SGP30和SHT31傳感器的采集數(shù)據(jù),以及配置AFE芯片的內(nèi)部運(yùn)行參數(shù)。核心電路的設(shè)計選用2個GPIO接口控制電化學(xué)傳感器的使能信號輸入,2個PWM引腳控制直流風(fēng)扇電機(jī)的轉(zhuǎn)速,3個A/D輸入引腳分別采集AFE輸出的氨氣和硫化氫模擬量電壓以及電池電壓。
3 預(yù)測模型設(shè)計
由于電化學(xué)傳感器存在易受周圍環(huán)境影響的固有特點(diǎn),且具有一定的響應(yīng)時間,因此僅通過底層監(jiān)測器進(jìn)行數(shù)據(jù)采集無法滿足對禽舍生產(chǎn)環(huán)境的及時掌握。系統(tǒng)實現(xiàn)的預(yù)測模型使用多種環(huán)境數(shù)據(jù)作為輸入數(shù)據(jù),使用Bi-LSTM模型計算氨氣濃度的預(yù)測值來解決上述問題。
3.1 模型結(jié)構(gòu)
對于時間序列預(yù)測問題,易使用循環(huán)神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)預(yù)測下一時刻的數(shù)據(jù),而長短期記憶網(wǎng)絡(luò)對循環(huán)神經(jīng)網(wǎng)絡(luò)進(jìn)行改進(jìn),可以解決循環(huán)神經(jīng)網(wǎng)絡(luò)由于層數(shù)增肌引起的梯度消失或梯度爆炸問題[18]。Bi-LSTM 由方向相反的LSTM網(wǎng)絡(luò)組合而成。檢測器采集的環(huán)境數(shù)據(jù)是包含時間信息的序列,因此選擇使用Bi-LSTM模型學(xué)習(xí)多個傳感器數(shù)據(jù)特征與下一時刻氨氣濃度的關(guān)系,預(yù)測監(jiān)測器所在位置下一時刻的氨氣濃度。
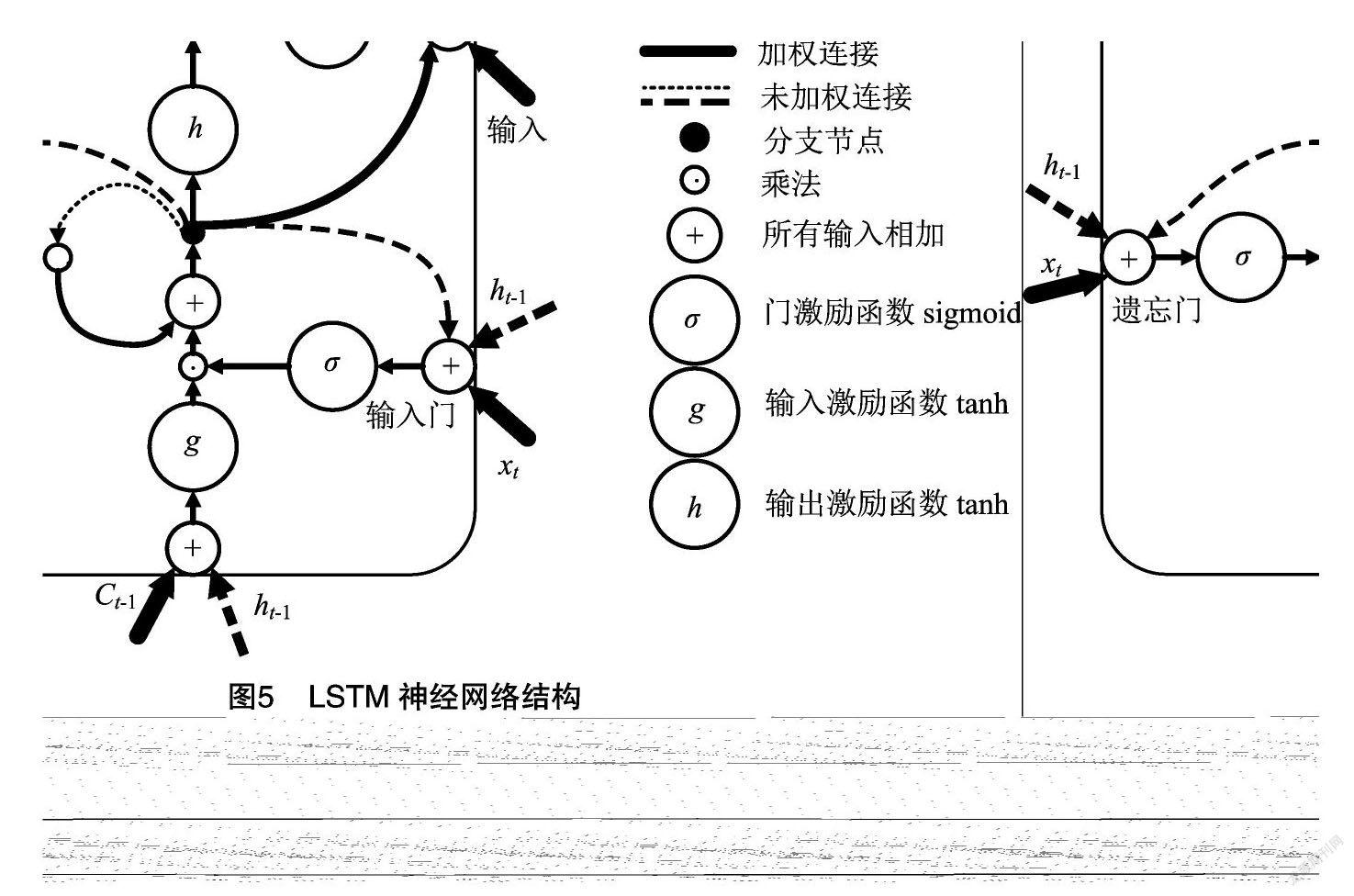
LSTM模型由若干個記憶單元組成,模塊通過3個門結(jié)構(gòu)控制和管理輸入輸出信息(圖5)。模塊中包含隨時間傳遞的單元狀態(tài)信息C和隱藏層狀態(tài)信息h,h t-1是上一時刻LSTM隱藏層信息,x t是當(dāng)前時刻的輸入值,C t-1是上一時刻LSTM記憶單元的狀態(tài)信息,C t是當(dāng)前時刻LSTM記憶單元的狀態(tài)信息。
3.2 基于LSTM的多傳感器預(yù)測模型
采集的數(shù)據(jù)中包括采集時間、氨氣濃度、硫化氫濃度和其他環(huán)境信息。為了深入探索氨氣濃度變化的歷史數(shù)據(jù),建立基于LSTM的實時氨氣濃度預(yù)測模型,將監(jiān)測器采集的所有環(huán)境數(shù)據(jù)作為模型輸入(圖6)。
氨氣濃度預(yù)測模型根據(jù)某一位置監(jiān)測器采集的歷史數(shù)據(jù)特征作為模型輸入,將下一時刻的氨氣濃度作為輸出,建立歷史采集數(shù)據(jù)和未來真實數(shù)據(jù)之間的映射關(guān)系。其中一條采集數(shù)據(jù)在t時刻的特征X(t)為
X(t)={x 0,…,x n}。(2)
式中:x 0表示某一時刻氨氣濃度;x 1,…,x n表示同一時刻其他傳感器采集值。考慮到監(jiān)測器使用的ME3-NH 3電化學(xué)傳感器易受到其他環(huán)境參數(shù)的影響,將采集到的其他傳感器值作為特征。將連續(xù)n個時刻的采集數(shù)據(jù)X(t-n+1),…,X(t-1)作為模型的輸入,將t+1時刻的氨氣濃度數(shù)據(jù)Y(t+1)作為輸出,其中n對應(yīng)輸入層的步長大小。氨氣濃度預(yù)測模型的表達(dá)式如下。
Y(t+1)=f({X(t-n+1),…,X(t-1)})。(3)
4 運(yùn)行結(jié)果與分析
4.1 訓(xùn)練測試集構(gòu)建
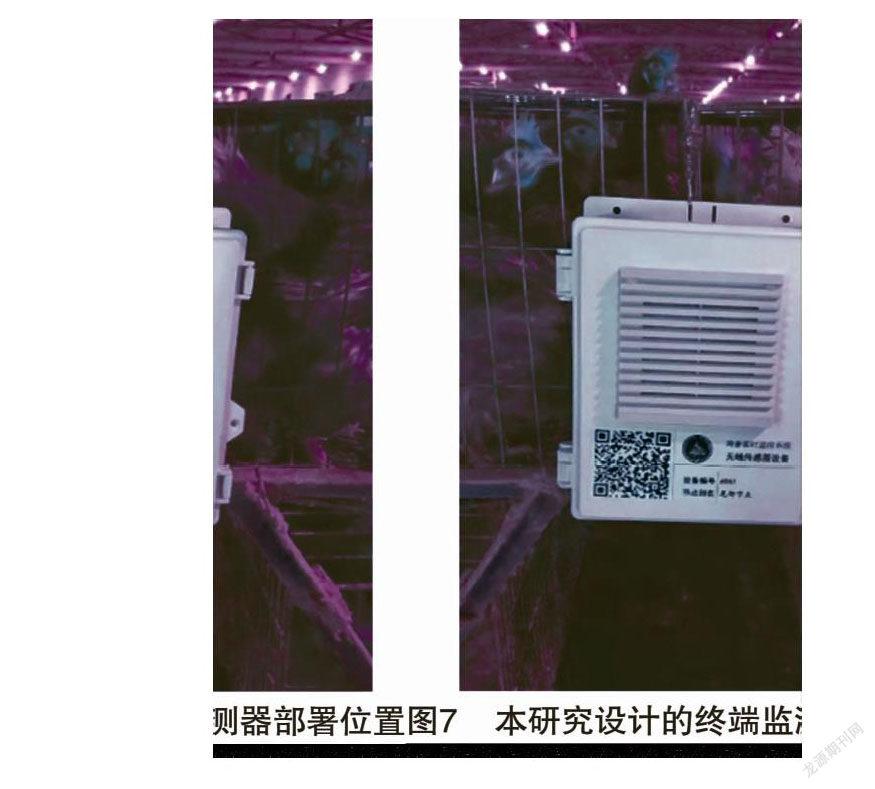
試驗數(shù)據(jù)的采集地點(diǎn)位于北京市平谷區(qū)某一小型禽類養(yǎng)殖場,時間為2020年5—6月,將所設(shè)計的監(jiān)測器終端懸掛于距離雞籠靠近糞到部位(圖7)。考慮到氣體濃度采集操作需要用到排風(fēng)扇進(jìn)行換氣,將傳感器的采集時間點(diǎn)間隔定為15 min,訓(xùn)練測試集共記錄了該禽舍內(nèi)30 d的采集數(shù)據(jù)。由于測試期間會遇到更換電池或路由器重啟等問題,使用算術(shù)平均值來填充缺失值。使用格拉布斯(Grubbs)法判斷異常值,并用相鄰位置數(shù)據(jù)的算術(shù)平均值代替異常值。為了避免維度對試驗結(jié)果的影響,對數(shù)據(jù)進(jìn)行歸一化處理,并構(gòu)建2 880個樣本數(shù)據(jù)。每一條樣本包含連續(xù)5個時刻的數(shù)據(jù),每一條數(shù)據(jù)中有該時刻的氨氣濃度以及其他全部傳感器的值。數(shù)據(jù)集的基本信息見表2。
在試驗過程中,將數(shù)據(jù)集劃分成訓(xùn)練集、測試集和驗證集,所占比重分別為80%、10%、10%。其中,驗證集用來調(diào)整模型的超參數(shù),測試集用來檢測模型的訓(xùn)練效果。模型中用到的超參數(shù)設(shè)置如下,迭代次數(shù)為50,輸入單元數(shù)為20,輸出單元數(shù)為2,隱藏層為32,塊大小為100。本試驗使用均方誤差MSE評估濃度預(yù)測模型的正確率,均方誤差用來衡量預(yù)測結(jié)果的誤差情況,MSE的數(shù)學(xué)表達(dá)見公式(4),該值越小,表示模型的預(yù)測效果越好。
MSE=1n∑ni=1(y-y^)2。(4)
式中:n表示樣本個數(shù);y^ 表示模型的預(yù)測值;y表示真實值。
4.2 對比試驗
4.2.1 不同歷史長度的訓(xùn)練對比
為了驗證模型的有效性,設(shè)定s為預(yù)測下一時間點(diǎn)所用的歷史數(shù)據(jù)條數(shù),分析不同s長度對模型的預(yù)測效果。網(wǎng)絡(luò)輸入使用同樣的測試集數(shù)據(jù),分別對比s為5、10、15條數(shù)時的預(yù)測結(jié)果,按照預(yù)測數(shù)據(jù)和真實值的均方誤差計算模型的準(zhǔn)確率。試驗對比結(jié)果見圖8。通過對比試驗可以發(fā)現(xiàn)選擇以過去10個時間點(diǎn)傳感器數(shù)據(jù)作為樣本輸入,模型預(yù)測效果相對較好。使用公式(4)計算圖中預(yù)測值和實際采集值曲線的均方誤差MSE可知,在使用過去10個時間點(diǎn)長度預(yù)測的情況下MSE為3.29%。
4.2.2 硬件平臺對比
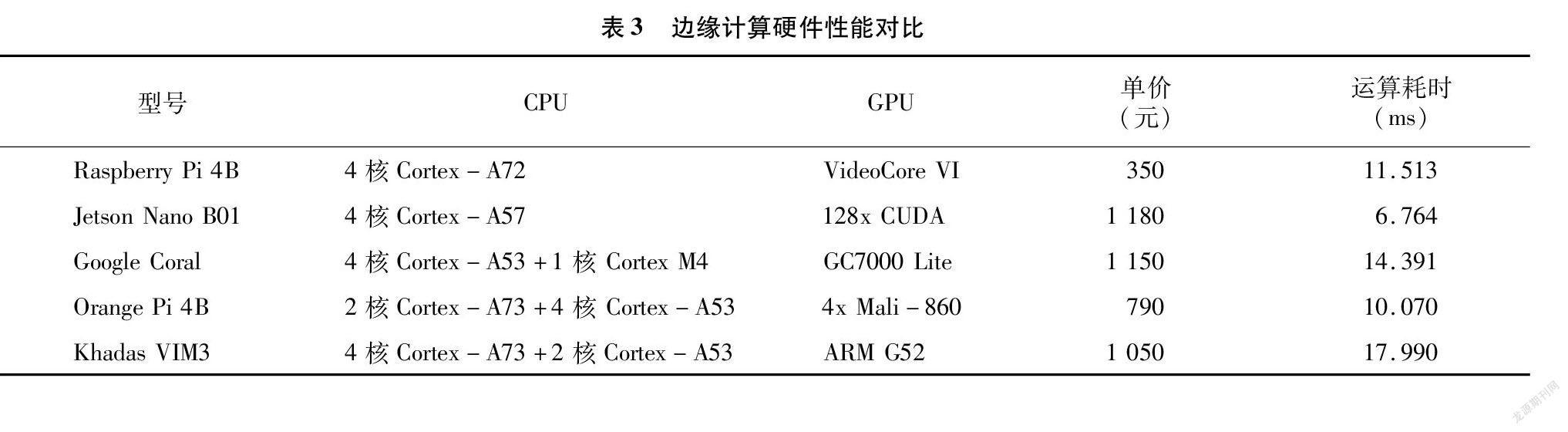
考慮禽舍的生產(chǎn)規(guī)模和經(jīng)濟(jì)效益,使用基于ARM架構(gòu)和Linux系統(tǒng)的單板計算機(jī)作為邊緣計算服務(wù)器。為了在滿足計算性能的情況下盡可能降服務(wù)器的成本,試驗對比5種常見的單板計算機(jī)在運(yùn)行預(yù)測模型時的效率(表3)。單板計算機(jī)所用的核心芯片都具有硬件GPU核。綜合考慮運(yùn)算時間和成本因素,系統(tǒng)選用樹莓4B型號作為邊緣計算服務(wù)器。
4.3 用戶端界面
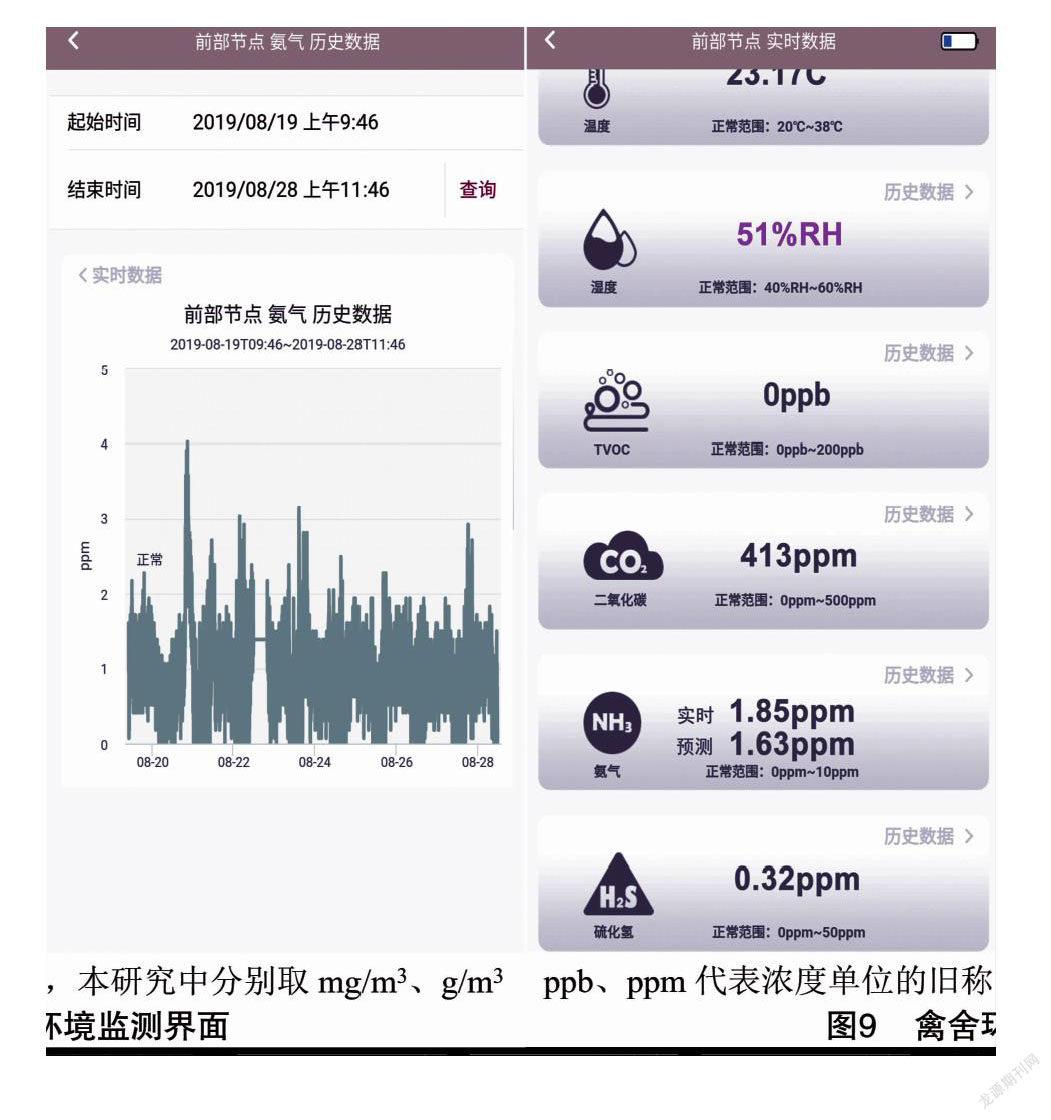
邊緣計算服務(wù)器將終端監(jiān)測器采集的數(shù)據(jù)和通過深度學(xué)習(xí)模型預(yù)測的下一時刻氨氣濃度定時推送到云端服務(wù)器。用戶登錄到系統(tǒng)展示界面后可以察看禽舍內(nèi)不同點(diǎn)位終端監(jiān)測器的實時環(huán)境采集數(shù)據(jù)、剩余電池電量以及未來15 min內(nèi)的氨氣濃度預(yù)測值。此外,還可以通過提前預(yù)設(shè)的報警閾值接收警告信息,并查看全部環(huán)境數(shù)據(jù)的歷史曲線(圖9)。
5 結(jié)論
本研究設(shè)計的禽舍監(jiān)控系統(tǒng)可以實現(xiàn)基于低功耗Wi-Fi的無線終端監(jiān)測器和基于深度學(xué)習(xí)的數(shù)據(jù)預(yù)測模型。以終端監(jiān)測器為感知層,采集禽舍內(nèi)的氨氣濃度、硫化氫濃度、二氧化碳濃度以及溫濕度等環(huán)境參數(shù),并上傳到邊緣計算服務(wù)器。在邊緣計算層以單板計算機(jī)為運(yùn)算載體,通過構(gòu)建以多傳感器采集數(shù)據(jù)為集合的時間序列數(shù)據(jù)集來訓(xùn)練Bi-LSTM深度學(xué)習(xí)模型。通過調(diào)優(yōu)參數(shù)和對比不同長度歷史數(shù)據(jù)的預(yù)測結(jié)果,可以實現(xiàn)對下一時刻即15 min后的氨氣濃度的最佳預(yù)測,該預(yù)測值與真實值之間的MSE誤差為3.29%。同時比較多種型號單板計算機(jī)運(yùn)行深度學(xué)習(xí)模型所需要的時間,最終確定使用樹莓派4B型號為最優(yōu)解決方案。由于終端監(jiān)測器采用低功耗Wi-Fi解決方案,因此在硬件部署上降低了施工難度和運(yùn)維成本。選用的邊緣計算單板計算機(jī)既可以降低系統(tǒng)的數(shù)據(jù)計算成本,還能為用戶提供有效的污染物預(yù)測服務(wù)。由于該系統(tǒng)可以相對準(zhǔn)確地提供未來一段時間內(nèi)的氨氣濃度預(yù)測值,因此對保障禽舍生產(chǎn)安全、降低有害氣體排放具有重要的參考作用。
參考文獻(xiàn):
[1]時 凱,陳長寬,卞紅春,等. 不同養(yǎng)殖模式及光照度對蛋雞產(chǎn)蛋率的影響[J]. 江蘇農(nóng)業(yè)科學(xué),2016,44(2):254-255.
[2]于 群,柳平增,李寶全,等. 基于MSP430的禽舍智能控制系統(tǒng)設(shè)計及應(yīng)用[J]. 江蘇農(nóng)業(yè)科學(xué),2018,46(9):236-240.
[3]劉忠超,范偉強(qiáng),常有周,等. 基于ZigBee和Android的牛舍環(huán)境遠(yuǎn)程監(jiān)測系統(tǒng)設(shè)計[J]. 黑龍江畜牧獸醫(yī),2018(17):61-64,234.
[4]牛培培,張總平,貢玉清,等. 規(guī)模養(yǎng)殖氨氣監(jiān)測及控制技術(shù)[J]. 畜牧與獸醫(yī),2021,53(8):137-141.
[5]王 琳,吉增濤,李文勇,等. 信息技術(shù)在家禽精細(xì)養(yǎng)殖應(yīng)用中的研究進(jìn)展[J]. 中國家禽,2017,39(12):48-53.
[6]Chanonsirivorakul R,Nimsuk N. Analysis of relationship between the response of ammonia gas sensor and odor perception in human[C]//8th International Electrical Engineering Congress.Chiang Mai,2020:1-4.
[7]段文杰,胡月明,陳聯(lián)誠,等. 基于云計算技術(shù)的家禽養(yǎng)殖管理系統(tǒng)研究與實現(xiàn)[J]. 廣東農(nóng)業(yè)科學(xué),2014,41(1):165-168.
[8]姬 舒,劉 幸,閆鋒欣,等. 物聯(lián)網(wǎng)在蛋雞生產(chǎn)中的應(yīng)用及研究進(jìn)展[J]. 中國家禽,2018,40(18):49-53.
[9]曾志雄,羅毅智,余喬東,等. 基于時間序列和多元模型的集約化豬舍溫度預(yù)測[J]. 華南農(nóng)業(yè)大學(xué)學(xué)報,2021,42(3):111-118.
[10]楊 亮,劉春紅,郭昱辰,等. 基于EMD-LSTM的豬舍氨氣濃度預(yù)測研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2019,50(S1):353-360.
[11]左 敏,薛明慧,張青川,等. 面向互聯(lián)網(wǎng)食品文本實體關(guān)系聯(lián)合抽取研究[J/OL]. 重慶郵電大學(xué)學(xué)報(自然科學(xué)版):1-8.[2021-10-19]. http://kns.cnki.net/kcms/detail/50.1181.N.20211011.1553.004.html.
[12]徐清越,左 敏,張青川,等. 基于位置注意力機(jī)制的字詞雙維度卷積神經(jīng)網(wǎng)絡(luò)違法違規(guī)行為語義分類模型[J]. 科學(xué)技術(shù)與工程,2020,20(25):10341-10346.
[13]張 楊,范 穎,王哲,等. 基于可調(diào)諧激光吸收光譜技術(shù)的硫化氫檢測方法研究[J]. 電子測量與儀器學(xué)報,2017,31(12):1943-1947.
[14]王 雅,楊雨露,楚意月,等. 電催化氮還原催化劑的研究進(jìn)展[J]. 化學(xué)研究,2019,30(5):532-536.
[15]陳 巖,楊東軒,郭 宏,等. 低功耗綠地墑情監(jiān)測WSN節(jié)點(diǎn)[J]. 儀表技術(shù)與傳感器,2012(7):107-110.
[16]羅 俊,孫國耀. 基于WiFi無線傳感器網(wǎng)絡(luò)的工業(yè)環(huán)境監(jiān)測平臺系統(tǒng)設(shè)計[J]. 儀表技術(shù)與傳感器,2018(8):65-68.
[17]楊東軒,劉 碩,王 嵩. 低功耗電子號牌在排隊系統(tǒng)中的設(shè)計與實現(xiàn)[J]. 計算機(jī)應(yīng)用與軟件,2018,35(12):76-82.
[18]Hochreiter S,Schmidhuber J. Long short-term memory[J]. Neural Computation,1997,9(8):1735-1780.
猜你喜歡
中國教育技術(shù)裝備(2016年19期)2016-12-27 19:23:52
中國遠(yuǎn)程教育(2016年11期)2016-12-27 18:07:31
現(xiàn)代商貿(mào)工業(yè)(2016年25期)2016-12-26 09:58:02
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導(dǎo)刊(2016年9期)2016-11-07 22:20:49