極化SAR影像與DEM融合技術在計算水庫動庫容中的應用
2022-06-01 00:58:48王啟龍
水利技術監督 2022年6期
關鍵詞:方法
王啟龍
(遼寧省水利水電勘測設計研究院有限責任公司,遼寧 沈陽 110000)
1 概述
水庫動庫容計算方法受河道地形及水力學條件影響較大,在計算時需要收集大量水文地質資料以及現場實時監測的數據,數據采集周期長。常規的計算方法是將水庫簡化為典型的河槽式,采用斷面的方式計算水庫動庫容。為了解決常規方法計算不準確及計算結果不及時的問題,本文借助遙感影像的實時性特點,結合DEM數據模型,準確的測定回水曲線,利用楔形容積計算和槽蓄容積計算方法計算水庫動庫容并加以修正。
2 動庫容及常規計算方法
2.1 動庫容的定義
水庫總庫容(Qz)是由靜庫容(Qj)和動庫容(Qd)2部分構成,其中,動庫容又由河道槽蓄動庫容(Qh)和庫區回水引起的附加楔蓄動庫容(Qf)構成。如圖1所示,靜庫容是由A′、D′、B所構成的體積,動庫容是由E′、C′、C、D、D′所構成的體積。其數學關系見式(1)、(2)。
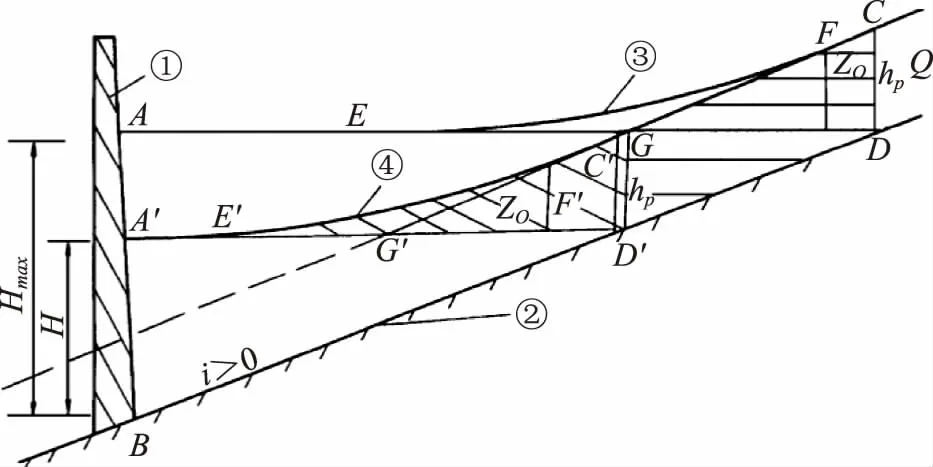
圖1 河槽水庫動庫容特性圖
(1)
Qd=Qh+Qf
(2)
靜庫容是壩前水深H的指數多項式函數:
V=f(Z)=aZ3+bZ2+cZ+d
(3)
式中,a、b、c、d—常數;V—庫容;Z—水位。
2.2 常規動庫容計算方法
常規動庫容的計算方法是在靜庫容的基礎上,將整個庫區劃分為若干段,然后計算每一段的楔形庫容與靜庫容之和。
(1)結合水庫庫區的特點,將水庫庫區劃分為若干個庫段,如圖2所示,以便分段計算庫容;
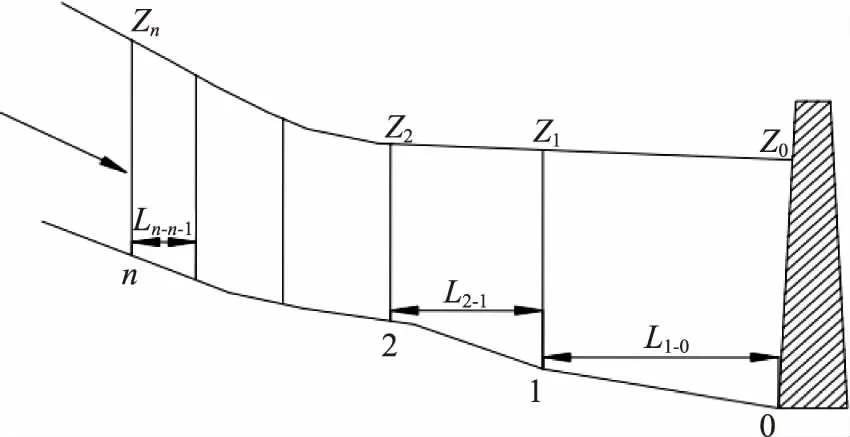
圖2 庫段劃分示意圖
(2)針對每1庫段,繪制各斷面的水位-面積曲線Z=f(A);
(3)通過水位-面積曲線,查找出各水位Z0,Z1,……Zn對應的斷面面積A0,A1,……An;

(5)計算各庫段的面積增加值:
(4)
……
(6)結合上面的公式,計算楔形體體積:
(5)
(7)
V動=V靜+V楔
(6)
3 基于極化SAR影像與DEM測定動庫容
基于極化SAR影像和DEM測定動庫容的方法分2步:第1步,采用極化SAR影像和DEM數據獲取回水曲線;第2步,利用第1步獲取的回水曲線計算出動庫容。
在獲得極化SAR影像后,首先將極化SAR影像預處理,主要是圖像的多視處理和濾波處理,目的是增強水體邊緣,以便極化SAR影像自動提取時準確高效;然后依據DEM數據,將極化SAR影像配準,使極化SAR影像和DEM數據位于同1個坐標系統中;最后,基于極化SAR影像,以河道某1個斷面的水面寬度為基準,以DEM數據為剖面獲取該斷面的水位Z和壩址距斷面的距離L,依據這樣的方法,重復操作,獲取每1條斷面的數據,最終繪制出回水曲線。
3.1 極化SAR影像預處理
單視復數(Single Look Complex,SLC)SAR圖像雖比光學影像更清晰,但是由于其獨有的成像方式,所以具有很多斑點噪聲,若是不經過一定的處理工作,那么斑點噪聲就會對地物分類和識別結果發生嚴重影響。為了降低噪聲對影像的影響,提高極化SAR影像的解譯效果,需要進行多視處理。多視處理主要是通過在將極化散射矩陣轉化成相干矩陣或協方差矩陣時,確定其在距離向和方位向的視數來降低斑點噪聲的。
本文對極化SAR影像統一采取3×3視的多視化處理,即距離向和方位向的視數均為3,具體的算法如下(以相干矩陣為例)。對相干矩陣T進行多視窗口大小為3×3的多視處理,在經過式(2.26)之后,并經過多視處理,相干矩陣T就變成T0,
(7)
式中,N—視數(本文為N=3);k—目標矢量有Pauli旋轉基下的目標散射矢量k。
現有多種濾波方法可用于減少極化SAR影像的斑點噪聲,本文選用的濾波方法是經典的Refined Lee濾波方法。Refined Lee濾波方法是Lee等人提出的基于邊界對齊窗和最小均方誤差的濾波算法。
這個算法的思想是采用沿邊緣方向的滑動窗對影像中的地物目標進行識別,將滑動窗中不同類別的像素減少,使得相同種類的像素所占比例上升進而增強此類的像素。這種濾波能夠解決4個通道之間相互影響,能夠將影像中的相干斑的痕跡減弱甚至消除,而且還能將影像中的極化信息保持住。濾波是在一個移動的窗口中對像素進行處理的,這個移動窗口的大小決定了圖像的特點。通常,移動窗口比較小具有較好的邊緣保持性,移動窗口比較大(9×9或11×11)能夠對相干斑有較好的平滑性,但會使圖像邊緣損失很多信息。由此本文為了消除SAR系統固有的相干斑噪聲影響和使圖像具有較好的邊緣保持性,采用窗口大小為5×5的Refined Lee濾波。
3.2 提取回水曲線
利用極化SAR影像提取回水曲線,采用的分解方法是H/A/α分解,H/A/α分解方法的主要思想是求解相干矩陣的最大特征值,以其對應的散射類型作為目標物的主散射機制。但是只采用一種主散射機制無法完整地表征復雜地物的整體后向散射特性,所以在其基礎上提出了H/A/α分解,該方法結合平均散射機制和散射隨機特性對目標散射特征進行描述。
首先對給定的相干矩陣T,進行特征值分解,得到其特征值和對應的特征向量。設其特征值和正交特征向量分別為λ1、λ2、λ3與u1、u2和u3,其中λ1≥λ2≥λ3≥0,且λ1、λ2和λ3可表示成:

T可由特征值和特征向量分解為,
T=UΛU-1
(8)
式中,Λ=diag(λ1,λ2,λ3)—一個特征值矩陣,U=[u1,u2,u3]—對應的酉特征向量矩陣。
通過計算T的特征向量,可以獲得3個互不相關的目標,根據這組目標可以進一步構造出一個簡單的統計模型,其過程包括將T展開成3個相互獨立的目標之和,該分解過程可寫成如下形式,
(3)根據鉆探工程中的異常情況、孔內電視攝像發現的裂隙,結合滑坡周界進行綜合分析,按照安全可靠原則,大致確定本滑坡體的滑動面。鉆探過程中出現的其他異常點位置不排除在外界影響下會發育成新的潛在滑動面。建議對滑坡進行深孔變形監測,以獲取精確的滑動面,并加強對滑坡的長期監測。
(9)
um=ejφm[cosαm,sinαmcosβmejδm,
sinαmsinβmejγm]T,m=1,2,3
由于λ1≥λ2≥λ3≥0,故λ1對應的特征向量u1為地面目標的主散射機制,Cloude思想就將其代替該地面目標的極化相干矩陣。
則T特征值對應的散射機制隨機性定義如下,
(10)
由上式和α就可以定義平均極化散射角α,該參數是在主散射機制的基礎上提出的,表示平均散射程度,其表達式如下:
(11)
雖然利用參數α能夠對目標進行識別,若目標的主散射機制相同便無法區分。為了解決這一問題,提出了能夠表征目標散射隨機性的參量極化散射熵H,極化散射熵H是一種度量目標散射隨機性的參數,其表達式如下:
(12)
H的取值范圍是(0,1),當H等于0時,后向散射可以被一種主散射機制來表示,即此時可以用一個完整的散射過程表示;H等于1時,極化信息等于0,散射是一個不確定性的噪聲。
極化各向異性系數A能夠使H表征的散射隨機性與相干矩陣中的特征值相對應,它表示主散射之外的其余相對較弱的散射分量之間的強弱關系,A的取值范圍是(0,1),適用于低熵值和中熵值的情況,其表達式如下:
(13)
3.3 基于極化SAR影像和DEM測定動庫容
基于極化SAR影像和DEM測定動庫容的具體步驟如下:
(2)將干流回水區域L0等分為N段,依據回水曲線計算出等分點上的水位值Zi;如圖3所示。
(3)依據圖3,計算每一段的陰影面積Si;
(4)從極化SAR影像中提取水面信息,計算各分段對應的水面面積Ai,Ai與Li的比值就是平均河道寬度Di;
(7)V總=V靜+V槽+V楔。
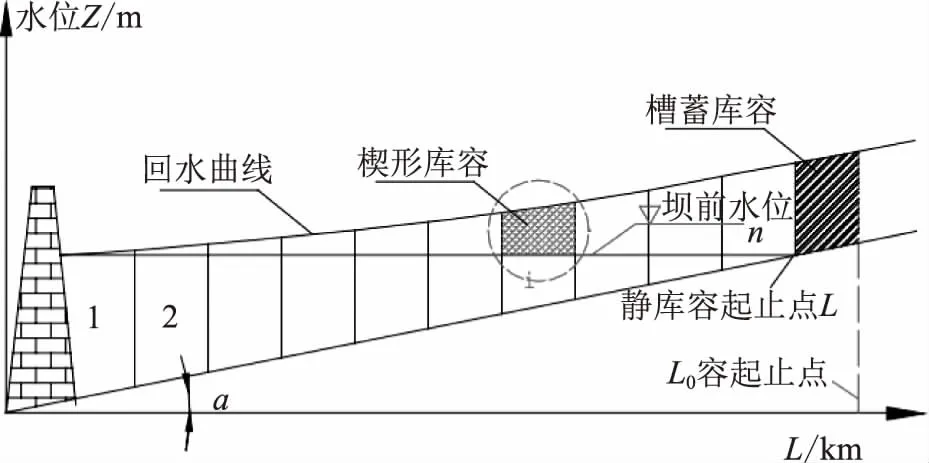
圖3 動庫容示意圖
4 與傳統方法的對比分析
以桃林口水庫為例,將兩種方法對比分析,桃林口水庫位于秦皇島市西北,水庫正常蓄水位為143.4m,總庫容8.59億m3,桃林口水庫壩長500m,庫區水面蜿蜒蛇行,水庫長度約27km。
采用傳統的方法,將水庫分成12段,針對每一段,分別計算靜庫容和楔形庫容,傳統方法計算的動庫容為8.45億m3。
采用極化SAR影像和DEM的方法計算動庫容時,同樣將庫區分成12段,利用上面介紹的方法,分別計算靜庫容、楔形庫容和槽蓄庫容,詳見表1。最終利用遙感圖像和DEM方法測定的動庫容為8.58億m3。

表1 基于極化SAR影像和DEM方法計算動庫容 單位:108m3
傳統的方法確定回水曲線是利用有效的水文站點實測數據,根據水力學公式計算求得,由于水力學公式較為依賴計算者的經驗判斷;而極化SAR影像結合DEM方法確定的回水曲線是直接測定,所以更能反映出回水曲線的真實值。
傳統的方法在采集數據時需要大量的人力、物力及時間,并且有些資料很難準確的獲取,整個計算周期是很長的,計算出的結果已經不能實時準確的反應當前水庫的動庫容;而極化SAR影像結合DEM方法可以發揮遙感影像大面積實時有效的觀察數據的特點,可以在短時間內重復觀測數據,進而推測出庫容的動態變化規律。
傳統的方法在計算楔形庫容時,楔形庫容的準確性取決于首尾斷面的選擇,這就造成了一定的不確定性和隨機性;而極化SAR影像結合DEM方法的楔形庫容是通過計算分段水面面積與河道干流長度的比值,此數字準確且客觀。
5 結語
對于小型水庫,可以認為水庫的水面是水平的,即可忽略楔形體的存在;對于一些水量集中在水庫前部的中型水庫而言,楔形體占總庫容的比例較小,可以忽略;對于一些比降較大、水量分布均勻的水庫,楔形體占比較大,不能忽略。
極化SAR影像和DEM相結合的方法較傳統方法具有明顯的優勢,其實時性和準確性大大提高,極化SAR影像和DEM相結合的方法測定的動庫容也是一個估測值,只是無線接近真實值的估測值,為了更真實的反應動庫容,在以后的研究中,可以從算法、極化SAR影像的精度和DEM的精度3方面改進提高。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
