工程測量儀器使用過程中精度的控制分析
2022-05-30 06:59:16彭濤
大眾標準化 2022年9期
彭 濤
(貴州大學,貴州 貴陽 550025)
在工程測量方面應用最為廣泛的是GPS技術,GPS控制測量方式具有較大的優勢,它不需要耗費過高的運營成本便能測量出較為精準的數據,并且在數據測量的過程中,不需要耗費太多的時間。因此相比較其他的測量手段而言,GPS控制測量方式在現階段的工程測量中,有較高的使用頻率。在工程測量的實際過程中,儀器的使用精度影響著測量的結果和準確性,對于以測量數據為基礎的建筑工程而言,有著非常重要的基礎性,是為工程提供準確數據的第一步,也是對工程安全性保障的一項重要工程操作。
1 提高工程測量精度的意義及價值
在工程建設的過程中,要依托現代化的測量設備以及各種測繪軟件,進行精密的測量測繪,對各種數據進行處理計算,為工程的進一步實施做基礎。一般在厘米級的普通的土木工程的測量中,全站儀、經緯儀等儀器的測量完全可以滿足普通工程的需要,建立工程所需要的數據庫,但是在一些精度要求比較高的工程中,普通的測量儀器難以達到工程所需要的精度指標,不能滿足工程中對數據精度的要求,比如安裝定位要求在毫米乃至毫米以下的特種工程,普通的全站儀與經緯儀顯然達不到相關精度指標,這就需要更高精尖的測量儀器來勝任了。
1.1 工程測量的儀器使用精度影響了工程測量的工作效率
工程測量的精度在數據上為工程實施的準確性和可行性提供了詳實的數據,也為工程實施的工作效率提供了必要的準備。在工程測量儀器使用的過程中,借助現代化的測量方式和測量方法,保障了在測繪和計算過程中的數據的可靠性和準確性,尤其是在工程監測的過程中,多周期、多測回的監測數據是否準確,對工程的安全性有著至關重要的影響。
1.2 工程測量的儀器使用精度提升了工程測量的準確性
測量儀器的照準誤差以及讀數誤差會影響數據結果的真實性,因而在工程測量的使用過程中,需要對以上兩種誤差盡量消除,以此來提升測量的準確度。有時在測量的時候會借助自動化的測繪儀器,減少這種人為誤差帶來的影響,降低錄入數據信息時產生的錯誤,對數據的可靠性和準確性進行保障。
1.3 工程測量的儀器使用精度方便對工程測量數據結果的處理
在工程測量的儀器使用過程中,需要依靠專業的方法進行理論指導,將各種測量的儀器設備通過系統組合的方式,對所需要測量數據的工程進行角度、邊距以及高程方面的測量,當然最重要的是獲得所需要的工程的三維坐標以及各種工程數據。例如在國家級別的比較重要的工程中,對于控制網點的控制誤差的要求一般會控制在±1.0 mm內,同時對于各種構件的安裝的誤差要求不大于0.2 mm,在這種高精度要求下,對于測量儀器的使用和測量技術的發展提出了更高的要求。
2 工程中空間坐標測量技術及其精度控制
在大尺寸工程測量中,由于實驗環境的局限性以及工程測距比較大,使得測量的空間介于實驗室測量和大地測量的范圍之間,采用傳統的測量方法難以達到測量的精度要求,儀器的使用也超出了其使用的范圍。大尺寸工程測量表現為精密的工程測量,測量要素也從角度、長度測量擴展到坐標測量和形狀測量。空間坐標測量技術經歷了幾十年的發展,形成了許多不同的適用范圍下的測量方式和測量技術的發展,對于空間坐標測量,主要從高密度電子經緯儀交會測量、數字工業攝影測量、高精度全站儀測量、激光雷達測量、激光跟蹤測量、GNSS測量等六種測量技術進行介紹。
2.1 高密度電子經緯儀交會測量系統
全站儀在進行極坐標的測量過程中,其測距精度不足,造成了在大空間的測量中存在測量難度,因而采用高密度經緯儀進行交會測量,以此來彌補不足。測量主要采用兩臺高密度電子經緯儀以及一臺計算機組合而成,根據角度前方的交會測量原理如圖1所示,進行聯合測量,以此來解算空間點的三維坐標,獲得大尺寸測量中的空間坐標系。

圖1 經緯儀交會測量原理
此種經緯儀測繪的測角精度均優于士0.5 ",由于測量儀器以及計算機系統能夠形成穩定的測角功能,而且具有自準直,手柄記錄等優點,在工程中具有一定的應用,而且其對測量環境要求不苛刻,測量范圍比較大,是光學、非接觸式的測量系統,多使用的電子經緯儀為徠卡公司生產的T3000A, TMS 100A,TM6100A等型號,需要人工進行測量目標的照準,測量的效率不高,測量的自動化程度相對于其他測量系統而言較低。但是由于高密度電子經緯儀交會測量系統在精密準直測量等領域有著不可替代的作用,因而在一定的范圍內仍然使用。
2.2 數字工業攝影測量系統
計算機視覺測量系統也就是數字工業攝影測量系統,使用的設備包含多個攝像機、數碼相機等攝像、錄像設備,可以對圖像資料進行處理,對測量數據通過共線方程進行數據的處理,最終得到三維坐標系統。根據視覺系統攝像設備的數量可以分為單目視覺系統、雙目視覺系統以及多目視覺系統。如圖2所示為雙目視覺系統的原理圖。在惡劣條件以及動態條件測量下,具有相對于其他系統而言非常顯著的穩定的特點。
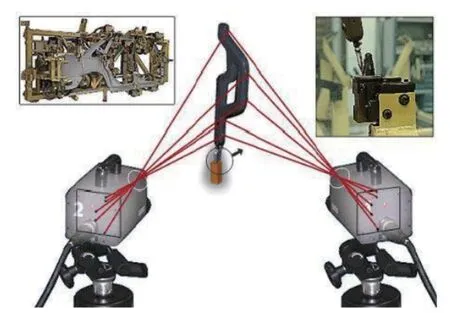
圖2 雙目視覺系統
此種測量系統的典型測量點位精度達到1∶10萬,是測量精度較高的一種測量系統,挪威MetroNor公司的MetroNor系統、德國AICON公司的DPA-Pro系統被數字工業攝影測量系統廣泛應用,在國內的許多公司也嘗試生產高精度的數字工業攝影測量系統,但是測量點位精度還不能達到國際領先水平。這種測量方式的優點是適合進行批量的點測量和面測量,測量的效率較高,但是對測量環境有一定的要求,不適宜在惡劣的環境下使用,測量的范圍也具有一定的局限性。
2.3 高精度全站儀測量系統
高精度全站儀測量系統是一種非接觸式的測量系統,需要借助一臺全站儀進行極坐標測量而得到目標測量對象的三維坐標。圓形棱鏡、反射片以及球面棱鏡等元件是高精度全站儀測量系統的重要元件組成,由于其采用Reflectorless合作目標模式,因而精度相比其他測量系統較低,但是由于有遙控設備的配合使用,因而一個人也能完成測量任務。現在典型的工業測量全站儀主要采用的設備型號有Leica研發的TDA5005、TDRA6000以及Sokkia的NET05(測角精度為士0.5",反射片測距精度為0.5 mm+1 x 106xD)等。高精度全站儀測量系統的測量范圍限定在幾十米到幾百米的范圍內,由于其測量精度高,因而應用在測量范圍較大。
2.4 激光雷達測量系統
激光雷達測量系統測量速度非常快,采用激光雷達掃描的方式,運用極坐標或者球坐標進行定位,采用激光雷達測量技術對目標場地進行工程測量。其測量速度達到十幾萬個測點每秒,為非接觸式的一種測量方式,并不需要測量目標的配合便可以完成測量,如圖3所示。

圖3 激光雷達測量系統
該系統需要借助計算機對測量的數據進行處理和篩選,以達到對數據進行快速的三維建模,測距精度優于±(10 mm+2.5 μm/m),空間坐標測量精度優于±0.24 mm,空間坐標測量速度最大為1 000點/s,適用于對于數據采集有時間要求的工程測量中,但是這種測量系統的缺點就是很難對單個目標測量物進行測量,當工程中需要進行多測點測量時,需要借助高精度的工具球作為其公共測點以此來保證坐標的準確。
2.5 激光跟蹤測量系統
激光跟蹤測量系統是一種接觸性測量系統,需要借助球棱鏡等元件進行配合測量,使用單獨一臺激光跟蹤儀,對目標測量對象進行極坐標的測量,借助位置檢測器實現對測量對象的快速追蹤,依托位置檢測器(Phase-Sensitive Detector, PSD)對目標對象進行追蹤,追蹤速度快,可以實現測量目標的三維掃描數字化坐標繪制。激光跟蹤儀原理結構圖如圖4所示。
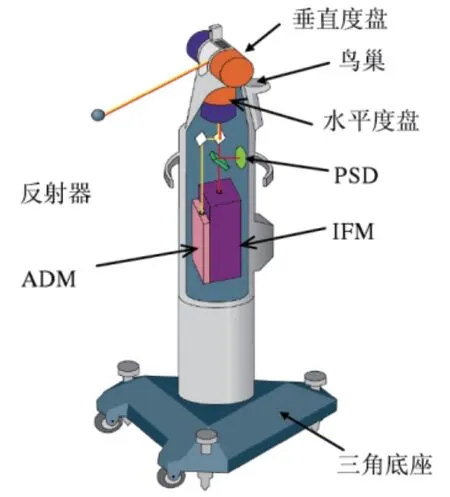
圖4 激光跟蹤儀原理結構圖
該系統具有測量速度快,且測量精度高的特點,當配合安裝相機之后可以實現數據的快速掃描拍攝,能夠直接成像,還可以拓展配置激光傳感器、智能掃描儀、激光測頭等元件,提升其使用性能。隨著技術的發展,激光跟蹤儀當采用了特殊的相位法測距技術之后,比如徠卡推出的AT401激光跟蹤儀,通過戶外160 m測距的測試,測量的精度可以提高到10μm,使激光跟蹤測量系統的使用領域更多更廣。
2.6 GNSS測量系統
隨著導航技術的發展,在工程測量領域還有一個日趨成熟的技術就是GNSS衛星導航定位系統。GNSS技術需要兩個以上的發射器,通過運用角度空間在前方交會的技術才能繪制出空間點的三維坐標,屬于小范圍的實時的高精度的三維坐標測量技術。
這種測量方式的優點是效率高,可以實現實時的動態測量,測量的精度可以達到亞毫米,采集的頻率也很高,達到了20次/s的頻率。可以滿足多個測量目標同時進行坐標的測量,在幾十米的測量范圍內,發射器的數量越多,測量的精度越高,越能夠滿足測量的需求。
3 工程中空間坐標測量技術分析
通過上個部分對不同的工程測量儀器所組成的空間測量系統的介紹,可以看出不同的測量儀器有各自不同的適用范圍和適用的要求,而且精度也各有不同。
通過測量技術的對比分析,可以得出,非接觸測量時,可以選擇高密度電子經緯儀交會測量以及數字工業攝影測量系統,當考慮采用無交會角影響的技術時,可以優先選擇激光雷達測量以及高精度全站儀測量系統,當選擇測量效率高的測量系統時候,可以優先選用激光跟蹤測量以及GNSS測量系統。當各項參數進行比對后發現,激光跟蹤測量具有明顯的多項優點,激光跟蹤儀的角度測量誤差是影響點位誤差的主要因素,以AT901-B型激光跟蹤儀為例,其標稱測角精度為,±(15μm+6μm/m),IFM測距誤差對點位誤差的影響在較短距離范圍內可以忽略不計,點位誤差主要由測角誤差引起。在對于不同的測量系統的選擇中,首先應當考慮典型測量范圍以及典型點位精度的影響,結合測量地域所具有的場地特點以及空間所提供的具體條件,選擇適合的測量系統和測量儀器。
4 結語
在工程測量的過程中,需要對控制網的精度進行嚴格的控制,而控制網精度的影響因素一般有測量儀器自身的精度、控制網網型的選擇、施測人員的技術水平等內容。在不同精度的要求下,測量儀器的選擇成為影響測量精度的首要因素,也是對測量的目標工程進行系統數據采集時重要的因素,在實際計算中,要重視對于高精度觀測值對于數值影響的重要性權重,這樣有利于對數據結果的優化以及對動態化獲得測量信息具有深遠的影響。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
太空探索(2016年6期)2016-07-10 12:09:06
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54