基于MATLAB 的無人機(jī)俯仰通道內(nèi)回路設(shè)計(jì)與仿真
2022-05-30 08:36:22詹福宇
科學(xué)技術(shù)創(chuàng)新 2022年16期
徐 亮 詹福宇 趙 健
(中電科特種飛機(jī)系統(tǒng)工程有限公司,四川 成都 611731)
無人機(jī)控制律設(shè)計(jì)是保證無人機(jī)能夠自主、平穩(wěn)飛行的核心,分為俯仰通道、滾轉(zhuǎn)通道、偏航通道控制律設(shè)計(jì),每個(gè)通道分為內(nèi)回路和外回路設(shè)計(jì)。本文以無人機(jī)的俯仰通道內(nèi)回路為例,利用matlab 軟件建立無人機(jī)內(nèi)回路開環(huán)和閉環(huán)模型,選擇不同的內(nèi)回路參數(shù),將所有參數(shù)對(duì)應(yīng)的頻域特性、時(shí)域特性以圖形方式進(jìn)行可視化呈現(xiàn),根據(jù)頻域、時(shí)域特性選擇參數(shù)進(jìn)行階躍響應(yīng)分析,確保控制系統(tǒng)最優(yōu)。
1 內(nèi)回路模型及控制參數(shù)
無人機(jī)俯仰通道通常采用角度駕駛儀,其結(jié)構(gòu)如圖1 所示。thetag 為指令俯仰角(由外回路如速度回路、高度回路產(chǎn)生),theta 為無人機(jī)俯仰角、Ktheta 為俯仰角控制參數(shù);q 為無人機(jī)俯仰角速度、kq 為角速度控制參數(shù)。無人機(jī)輸入為俯仰通道舵面指令,圖中-1 定義為負(fù)的俯仰舵面產(chǎn)生正的俯仰力矩。

圖1 無人機(jī)內(nèi)回路結(jié)構(gòu)圖
當(dāng)無人機(jī)需要進(jìn)行機(jī)動(dòng)時(shí),外回路產(chǎn)生的俯仰角指令thetag 與無人機(jī)當(dāng)前俯仰角theta 的差值乘上控制參數(shù)Ktheta 轉(zhuǎn)化為俯仰角速度指令;俯仰角速度指令與無人機(jī)當(dāng)前俯仰角速度的差值乘上控制參數(shù)Kq 形成舵面指令從而控制無人機(jī)進(jìn)行機(jī)動(dòng)。
2 內(nèi)回路開環(huán)、閉環(huán)模型建立
利用matlab/simulink 建立內(nèi)回路開環(huán)模型及閉環(huán)模型,如圖2、圖3 所示。其中舵機(jī)模型考慮角速度限幅為300/s,角度限幅250及50ms 延遲。
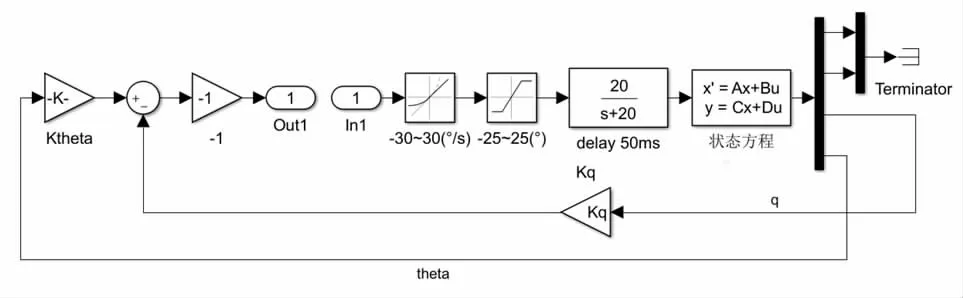
圖2 俯仰通道內(nèi)回路開環(huán)模型
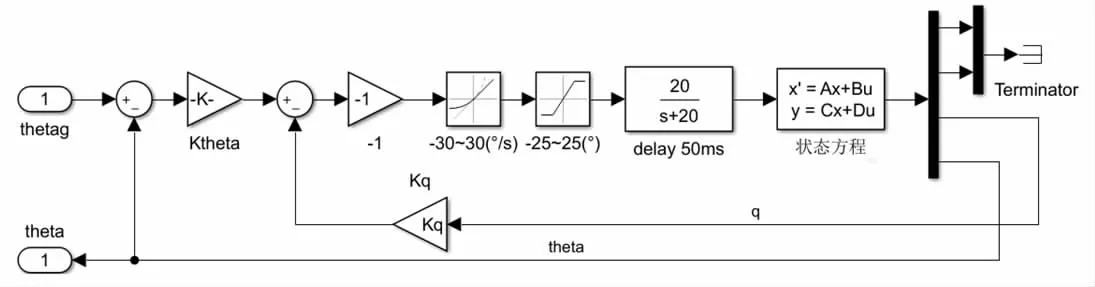
圖3 俯仰通道內(nèi)回路閉環(huán)模型
3 仿真結(jié)果分析
3.1 參數(shù)選擇
選擇俯仰角反饋系數(shù)Ktheta 范圍為0.1~1.5,間隔為0.05;俯仰角速度反饋系數(shù)Kq 范圍為0.1~1.0,間隔為0.05。
3.2 頻域特性
由圖4 可得,在上述Ktheta、Kq 選擇范圍內(nèi),幅值裕度均為無窮大;由圖5 可得,相位裕度范圍在600~1200之間。根據(jù)自動(dòng)控制原理,在所有參數(shù)下,控制系統(tǒng)均穩(wěn)定。
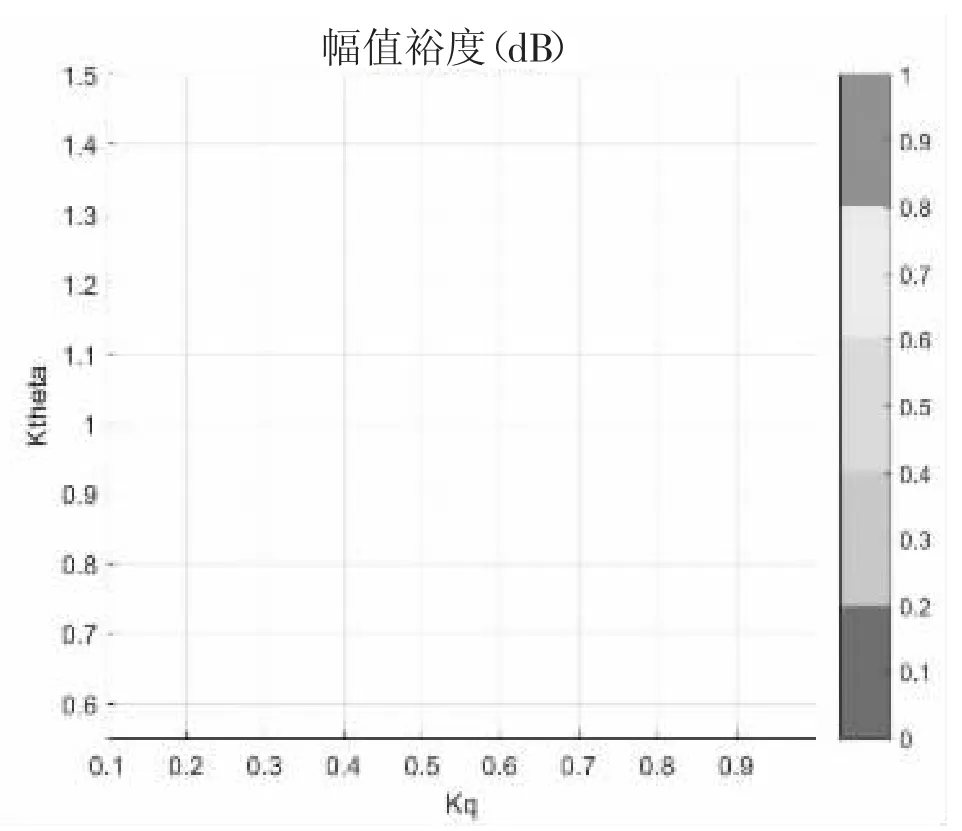
圖4 幅值裕度計(jì)算結(jié)果圖
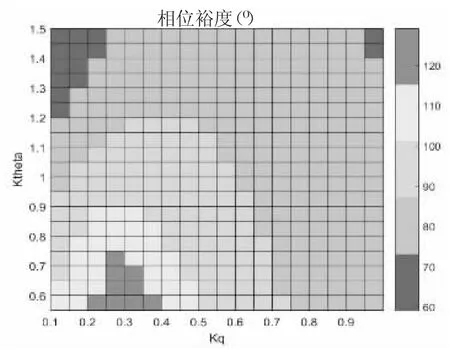
圖5 相位裕度計(jì)算結(jié)果圖
如圖6 所示,系統(tǒng)帶寬在0.2Hz~1.0Hz 之間,帶寬隨著角速度反饋系數(shù)Kq 的增大而減小,隨著俯仰角反饋系數(shù)Ktheta 的增大而增大。
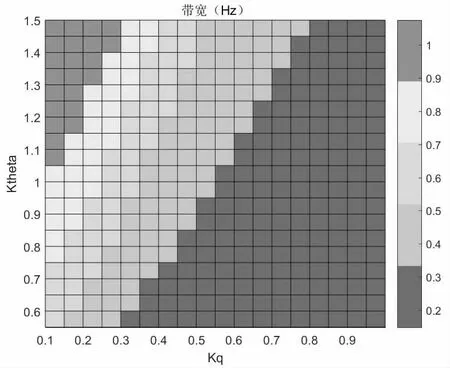
圖6 帶寬計(jì)算結(jié)果圖
3.3 時(shí)域特性
如圖7 所示,在上述Ktheta、Kq 選擇范圍內(nèi),上升時(shí)間范圍在0.4~1.8s;如圖8 所示,調(diào)節(jié)時(shí)間范圍在38 ~42.5s 之間。

圖7 上升時(shí)間計(jì)算結(jié)果圖
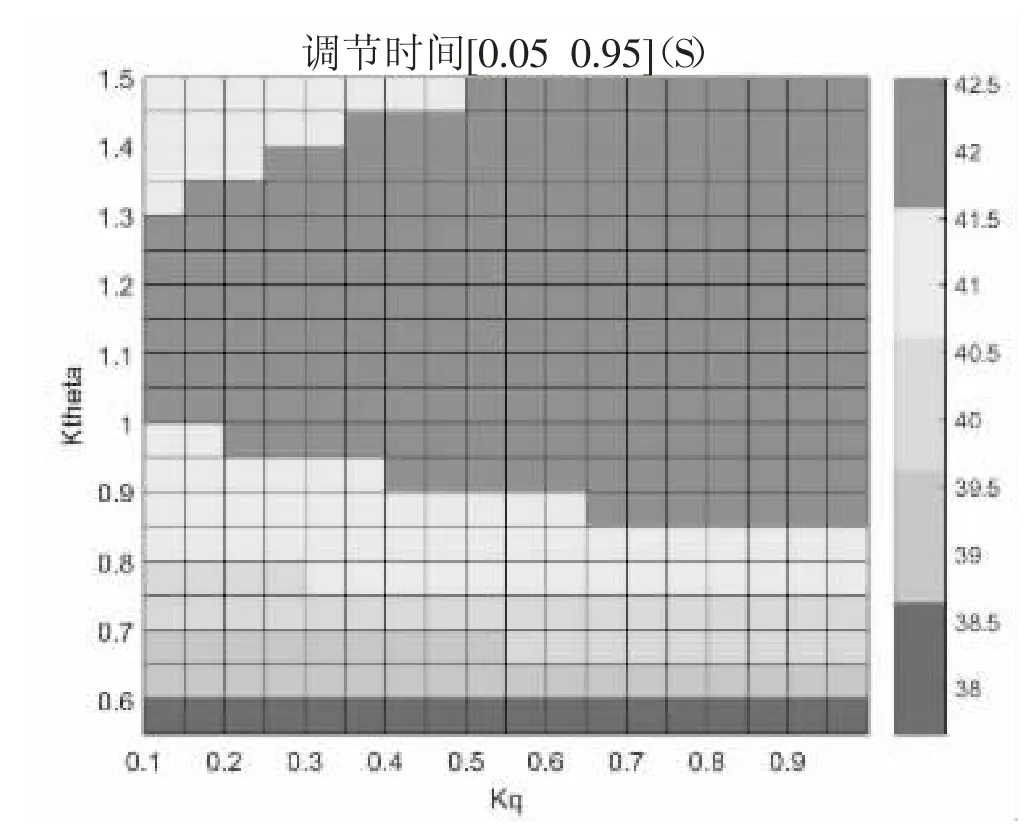
圖8 調(diào)節(jié)時(shí)間計(jì)算結(jié)果圖
由圖9 可得,超調(diào)量范圍在30%~70%之間,隨著俯仰角反饋系數(shù)Ktheta 增大而減小。
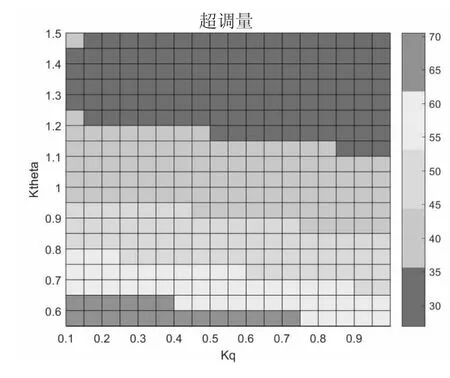
圖9 超調(diào)量計(jì)算結(jié)果圖
3.4 參數(shù)選擇
綜上分析,考慮無人機(jī)系統(tǒng)的快速響應(yīng)及穩(wěn)定性,選擇Ktheta 為1.0,Kq 為0.26。選定參數(shù)后,開環(huán)模型根軌跡如圖10 所示,系統(tǒng)阻尼為0.692。
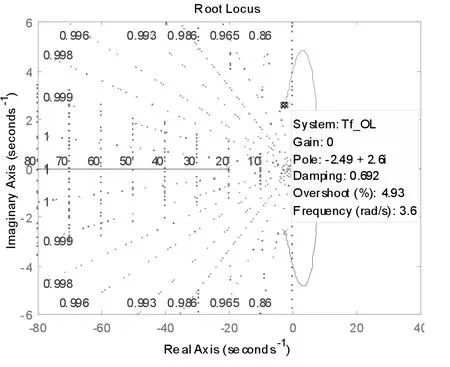
圖10 根軌跡計(jì)算結(jié)果圖
系統(tǒng)單位階躍曲線如圖11 所示,穩(wěn)態(tài)值為0.67。表明選擇的控制參數(shù)Ktheta、Kq 參數(shù)合理,系統(tǒng)穩(wěn)定,響應(yīng)正常。
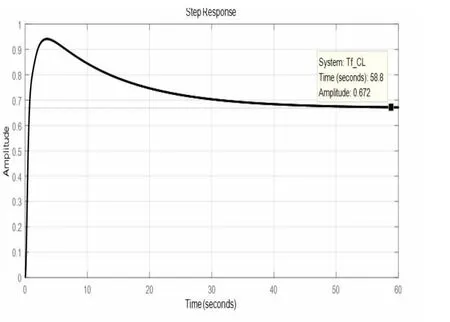
圖11 系統(tǒng)階躍響應(yīng)圖
4 結(jié)論
本文利用matlab 軟件建立了內(nèi)回路模型,計(jì)算了不同控制參數(shù)對(duì)無人機(jī)內(nèi)回路頻域特性及時(shí)域響應(yīng)的影響,最后考慮系統(tǒng)的響應(yīng)速度及穩(wěn)定性要求選擇了合適的控制參數(shù),并根據(jù)選擇的控制參數(shù)計(jì)算了系統(tǒng)阻尼及繪制了單位階躍響應(yīng)曲線,表明所選擇的控制參數(shù)合理可行、系統(tǒng)穩(wěn)定、響應(yīng)滿足要求。
本文由于篇幅有限只選取無人機(jī)一個(gè)狀態(tài)點(diǎn)進(jìn)行內(nèi)回路設(shè)計(jì),實(shí)際中需根據(jù)無人機(jī)不同的狀態(tài)點(diǎn)進(jìn)行頻域特性及時(shí)域響應(yīng)分析,最終選擇的參數(shù)需滿足無人機(jī)所有狀態(tài)的飛行。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52
