一種新型十字結(jié)構(gòu)機(jī)械臂設(shè)計(jì)
2022-05-30 07:44:14鄭麗娜張相哲班頂
電子測試 2022年8期
鄭麗娜,張相哲,班頂
(六盤水師范學(xué)院物理與電氣工程學(xué)院,貴州六盤水,553000)
0 引言
“中國制造2025”推動(dòng)了工業(yè)機(jī)器人、機(jī)械臂等智能化設(shè)備的應(yīng)用,使無人工廠成為可能,高校對該領(lǐng)域人才的培養(yǎng)更是重中之重。但目前在高校領(lǐng)域用于學(xué)生使用的機(jī)械臂大多控制精度低且運(yùn)動(dòng)學(xué)逆解復(fù)雜。而精度高的機(jī)械臂往往結(jié)構(gòu)復(fù)雜,難以小型化。本文設(shè)計(jì)的十字結(jié)構(gòu)機(jī)械臂控制精度高、結(jié)構(gòu)新穎實(shí)用、控制算法簡單并且小型化。該機(jī)械臂包括旋轉(zhuǎn)基座、動(dòng)力裝置、橫臂、縱臂、機(jī)器視覺裝置、執(zhí)行末端、直線軸承、四向滑臺機(jī)構(gòu)及固定機(jī)構(gòu)。在本裝置中,操作人員可通過程序控制或遙控方式靈活調(diào)節(jié)機(jī)械臂動(dòng)作,控制執(zhí)行末端精確到達(dá)指定位置進(jìn)行相應(yīng)操作。
1 整體結(jié)構(gòu)及工作原理
1.1 整體結(jié)構(gòu)
本機(jī)械臂由旋轉(zhuǎn)基座、動(dòng)力裝置、橫臂、縱臂、機(jī)器視覺裝置、執(zhí)行末端、直線軸承、四向滑臺機(jī)構(gòu)及固定機(jī)構(gòu)組成,機(jī)械臂整體結(jié)構(gòu)如圖1所示。在該裝置中,旋轉(zhuǎn)基座包括內(nèi)環(huán)與外環(huán);動(dòng)力裝置包括1-3號電機(jī)、閉環(huán)同步帶、開環(huán)同步帶及同步輪;橫臂、縱臂均采用直徑為6mm的硬質(zhì)光軸;固定機(jī)構(gòu)包括頂板、尾板和前板。其中,旋轉(zhuǎn)基座內(nèi)環(huán)上方安裝機(jī)械臂縱臂,可帶動(dòng)機(jī)械臂作旋轉(zhuǎn)運(yùn)動(dòng),當(dāng)不考慮旋轉(zhuǎn)基座時(shí),機(jī)械臂整體為Core XY變體結(jié)構(gòu);1號電機(jī)安裝在旋轉(zhuǎn)基座的外環(huán),通過閉環(huán)同步帶與旋轉(zhuǎn)基座內(nèi)環(huán)連接,用于驅(qū)動(dòng)旋轉(zhuǎn)基座內(nèi)環(huán)旋轉(zhuǎn);2號電機(jī)、3號電機(jī)通過開環(huán)同步帶與橫臂、縱臂連接,用于驅(qū)動(dòng)機(jī)械臂上下、前后方向的運(yùn)動(dòng);四向滑臺機(jī)構(gòu)內(nèi)部安裝有滾珠直線軸承,可減小滑動(dòng)時(shí)的摩擦力,四向滑臺機(jī)構(gòu)安裝在縱臂上,可在縱臂上自由升降;同時(shí)橫臂也安裝在四向滑臺機(jī)構(gòu)內(nèi),可在其內(nèi)作直線運(yùn)動(dòng);執(zhí)行末端安裝在固定機(jī)構(gòu)的前板下方;機(jī)器視覺裝置安裝在執(zhí)行末端與固定機(jī)構(gòu)前板之間。
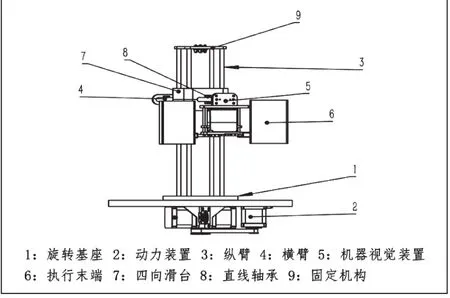
圖1 機(jī)械臂整體結(jié)構(gòu)
根據(jù)所設(shè)計(jì)的機(jī)械臂實(shí)際結(jié)構(gòu),其對應(yīng)運(yùn)動(dòng)模型如圖2所示。由一個(gè)轉(zhuǎn)動(dòng)副和兩個(gè)移動(dòng)副組成。轉(zhuǎn)動(dòng)副對應(yīng)機(jī)械臂的旋轉(zhuǎn)基座的轉(zhuǎn)動(dòng),移動(dòng)副對應(yīng)機(jī)械臂橫臂、縱臂的作直線運(yùn)動(dòng)和自由升降動(dòng)作。

圖2 機(jī)械臂運(yùn)動(dòng)模型
1.2 工作原理
在本設(shè)計(jì)中操作人員可通過程序控制或遙控方式靈活調(diào)節(jié)機(jī)械臂動(dòng)作,進(jìn)而控制執(zhí)行末端精確到達(dá)指定位置進(jìn)行相應(yīng)操作。當(dāng)采用程序控制方式時(shí),操作人員按下啟動(dòng)按鈕,主控制器立即將程序命令計(jì)算轉(zhuǎn)為控制命令(即步進(jìn)電機(jī)的脈沖信號及正反轉(zhuǎn)信號)發(fā)送給步進(jìn)電機(jī)控制器,步進(jìn)電機(jī)控制器根據(jù)控制命令驅(qū)動(dòng)步進(jìn)電機(jī)動(dòng)作,并通過同步帶傳動(dòng)從而帶動(dòng)整個(gè)機(jī)械臂協(xié)調(diào)有序的執(zhí)行相應(yīng)動(dòng)作,進(jìn)而控制執(zhí)行末端完成指定任務(wù)如抓取、放置等。若采用遙控方式,操作人員按下啟動(dòng)按鈕并根據(jù)實(shí)際需要對機(jī)械臂發(fā)送指令,主控制器接收指令經(jīng)計(jì)算后轉(zhuǎn)為控制命令發(fā)送給步進(jìn)電機(jī)控制器進(jìn)而驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)動(dòng),利用同步帶傳動(dòng)帶動(dòng)整個(gè)機(jī)械臂根據(jù)實(shí)際應(yīng)用要求控制執(zhí)行末端完成相應(yīng)動(dòng)作。本設(shè)計(jì)的機(jī)械臂為Core XY變體結(jié)構(gòu),其控制原理在不考慮旋轉(zhuǎn)基座時(shí)與Core XY結(jié)構(gòu)類似。Core XY是一種3D打印機(jī)的結(jié)構(gòu)類型。Core XY的工作原理是通過兩個(gè)電機(jī)同時(shí)控制X軸、Y軸的移動(dòng),當(dāng)兩個(gè)電機(jī)轉(zhuǎn)動(dòng)同向工作時(shí),往X軸方向移動(dòng);反之當(dāng)兩個(gè)電機(jī)轉(zhuǎn)動(dòng)反向動(dòng)作時(shí)則往Y軸方向移動(dòng)。在本設(shè)計(jì)中,兩個(gè)電機(jī)固定于機(jī)械臂底部,以減輕運(yùn)動(dòng)部分的重量,同時(shí)下移了整體裝置的重心,使得機(jī)械臂可以更加快速、穩(wěn)定的動(dòng)作。并且當(dāng)兩個(gè)電機(jī)同時(shí)作用時(shí),其力量比單個(gè)電機(jī)控制更加穩(wěn)定。
1.3 機(jī)械結(jié)構(gòu)選型
本設(shè)計(jì)的機(jī)械臂是一款小型化、輕量型的機(jī)械臂,需考慮其機(jī)械機(jī)構(gòu)的剛性、運(yùn)動(dòng)穩(wěn)定性以及整體機(jī)械結(jié)構(gòu)重量等因素,為保證其具有的特點(diǎn),該機(jī)械臂縱臂采用4根長度為250mm、直徑為6mm的硬質(zhì)光軸;機(jī)械臂橫臂采用2根長度為280mm、直徑為6mm的硬質(zhì)光軸;此外,旋轉(zhuǎn)基座內(nèi)環(huán)與四向滑臺均采用改性PC材料3D打印制作而成;其他受力結(jié)構(gòu)均采用碳纖維材料3D打印加工制作。
2 主控制器設(shè)計(jì)
主控制器由電源模塊、穩(wěn)壓模塊、步進(jìn)電機(jī)驅(qū)動(dòng)器及主控芯片組成,該控制器安裝在機(jī)械臂底部旋轉(zhuǎn)基座上。主控制器結(jié)構(gòu)圖如圖3所示。其中,電源模塊采用12V、2400mAh鋰電池為機(jī)械臂提供供電電壓;穩(wěn)壓模塊采用MP2225開關(guān)型變換器,其轉(zhuǎn)換效率高達(dá) 97%,在寬輸入范圍內(nèi)可實(shí)現(xiàn)5A的輸出電流,具有極好的負(fù)載和線性調(diào)節(jié)性能;主控芯片采用帶DSP和DP-FPU的高性能ARM Cortex-M7 MCU,該MCU具有2 MB Flash、1 MB RAM、480 MHz CPU以及外部存儲器接口和大量外設(shè),可滿足設(shè)計(jì)需求。在電路設(shè)計(jì)中,電源模塊兩極分別連接穩(wěn)壓模塊的IN+、IN-引腳,經(jīng)穩(wěn)壓模塊降壓后,輸出引腳連接主控芯片的VCC、GND引腳,同時(shí)主控芯片引腳連接步進(jìn)電機(jī)控制器進(jìn)而控制整個(gè)機(jī)械臂動(dòng)作。在機(jī)械臂整體結(jié)構(gòu)中采用OpenMV 4 plus 500萬攝像頭模塊作為機(jī)器視覺裝置,該模塊具有4根不同顏色的線,紅線、黑線分別接電源模塊正極、負(fù)極,其余兩根為信號線與主控制器連接實(shí)現(xiàn)對抓取放置物體的顏色識別、物體識別等操作,并將其結(jié)果返回主控制器。

圖3 主控制器結(jié)構(gòu)圖
3 軟件設(shè)計(jì)
本設(shè)計(jì)采用Keil V5軟件進(jìn)行機(jī)械臂控制程序的設(shè)計(jì),該軟件具有程序結(jié)構(gòu)靈活、適用性廣等特點(diǎn),所設(shè)計(jì)機(jī)械臂的控制流程如圖4所示,具體步驟如下:
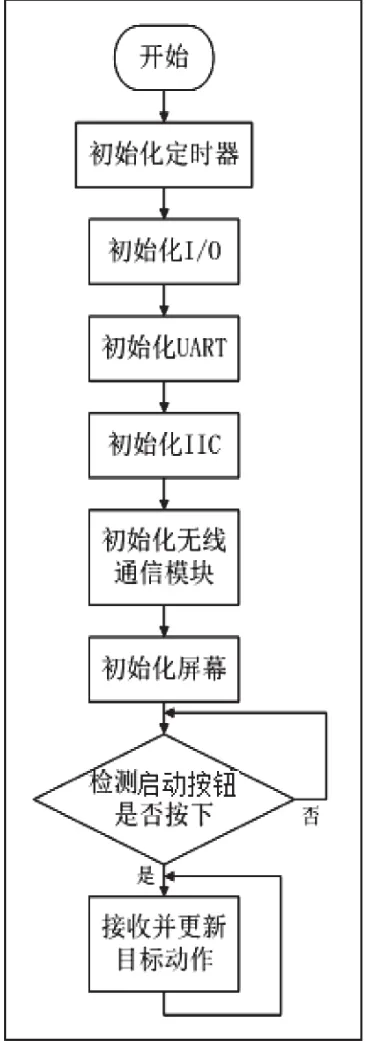
圖4 機(jī)械臂控制流程圖
(1)給裝置上電,完成裝置的初始化,包括定時(shí)器、I/O、UART、IIC、無線通信模塊初始化。
(2)檢測啟動(dòng)按鈕是否按下,若按下,則主控制器工作,若無,則重復(fù)(2)動(dòng)作,直至啟動(dòng)按鈕被按下結(jié)束。
(3)主控制器接收并更新目標(biāo)動(dòng)作,若接收到新的動(dòng)作任務(wù),則發(fā)出指令控制步進(jìn)電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)動(dòng)至指定動(dòng)作使機(jī)械臂完成相應(yīng)工作,若主控制器沒有接收到新的動(dòng)作,則重復(fù)(3)動(dòng)作。
(4)重復(fù)以上,執(zhí)行動(dòng)作任務(wù)。
4 實(shí)驗(yàn)結(jié)果分析
為驗(yàn)證所設(shè)計(jì)機(jī)械臂的可靠性、穩(wěn)定性等性能,則對以下5種運(yùn)動(dòng)狀態(tài)下的精度進(jìn)行實(shí)驗(yàn),并記錄運(yùn)動(dòng)行程、重復(fù)定位次數(shù)、單次運(yùn)動(dòng)時(shí)間(s)、重復(fù)定位精度(mm),實(shí)驗(yàn)結(jié)果見表1。

表1 機(jī)械臂運(yùn)動(dòng)狀態(tài)分析
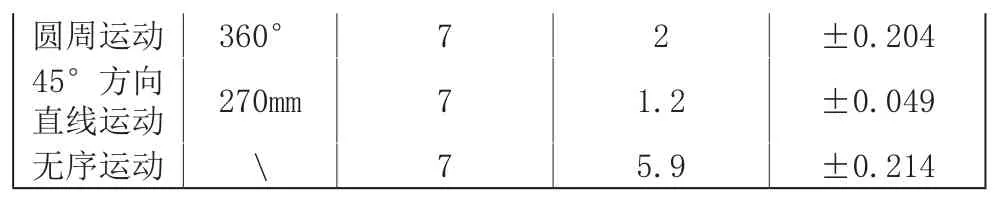
圓周運(yùn)動(dòng) 360° 7 2 ±0.204 45°方向直線運(yùn)動(dòng) 270mm 7 1.2 ±0.049無序運(yùn)動(dòng) 7 5.9 ±0.214
從表1數(shù)據(jù)可知,所設(shè)計(jì)的十字結(jié)構(gòu)機(jī)械臂在水平運(yùn)動(dòng)、垂直運(yùn)動(dòng)以及45°方向直線運(yùn)動(dòng)的運(yùn)動(dòng)狀態(tài)下,單次運(yùn)動(dòng)時(shí)間為1.2s,且定位精度較高,同時(shí)該機(jī)械臂還可調(diào)整旋轉(zhuǎn)角度為360°,也可以根據(jù)實(shí)際情況更換光軸增加行程。
5 結(jié)論
本文設(shè)計(jì)的十字結(jié)構(gòu)機(jī)械臂,具有精度高、易控制、小型化、輕量型的特點(diǎn),該裝置為高精度小型機(jī)械臂帶來了更好的選擇,結(jié)構(gòu)新穎,具有廣泛的市場前景。且可根據(jù)實(shí)際情況更換光軸增加行程以及增大負(fù)責(zé)旋轉(zhuǎn)的從動(dòng)同步輪來進(jìn)一步提高旋轉(zhuǎn)的精度。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文評點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49