基于衛星定位與GPRS 技術的檢測系統設計
2022-05-26 02:11:54張洪厲謝文娣
電子制作 2022年8期
關鍵詞:系統
張洪厲,謝文娣
(安徽新華學院電子工程學院,安徽合肥,230088)
0 引言
隨著無人汽車,無人機等新興科技產品的出現,未來將會被大規模的生產及使用,對于規模化無人智能產品的監管及其位置信息等大數據的采集與分析顯得尤為重要。如處于沙漠和大海航行時,地理坐標無法通過蜂窩網絡進行定位,需要依靠衛星定位,實時獲取和更新數據,因此研究基于衛星定位技術的實時監控和數據采集等問題將具有很好的現實意義;同時對于運動的物體,顯示的數據刷新率需要達到10Hz,為解決以上問題,本文設計一款可為使用者提供良好無線傳感網絡的運動載體實時監控系統。為提高系統的綜合性能,本文采用基于GPS、GLONASS 和北斗衛星系統三合一進行設計,同時利用云端服務器和手機采集并存儲數據。
1 方案設計
本系統設計了太陽能穩壓電源供電,不僅提高續航能力,而且低碳環保;并通過藍牙模塊與終端手機Laptimer APP 連接,實現信息數據的可視化管理;采用衛星定位模塊,實時顯示當前的位置信息,即當前位置的經緯度、海拔高度和精度,并且坐標誤差不能超過十米,能夠實時顯示當前的采樣時間,做到實時定位,永不迷失。可通過APP 程序調用手機攝像頭,將時間、位置、速度等用戶感興趣的數據標注在視頻中,完成系統的實時記錄。衛星定位模塊最多可以支持12 顆衛星進行定位,監測到的地理信息更精確。可連接到Android 和IOS 兩種系統,并顯示所收集到的數據。衛星定位模塊能隨時監測移動目標位置信息,并將信息通過GPRS 模塊傳輸到云端服務器,以實現數據的儲存和記錄。設計方框圖如圖1 所示。
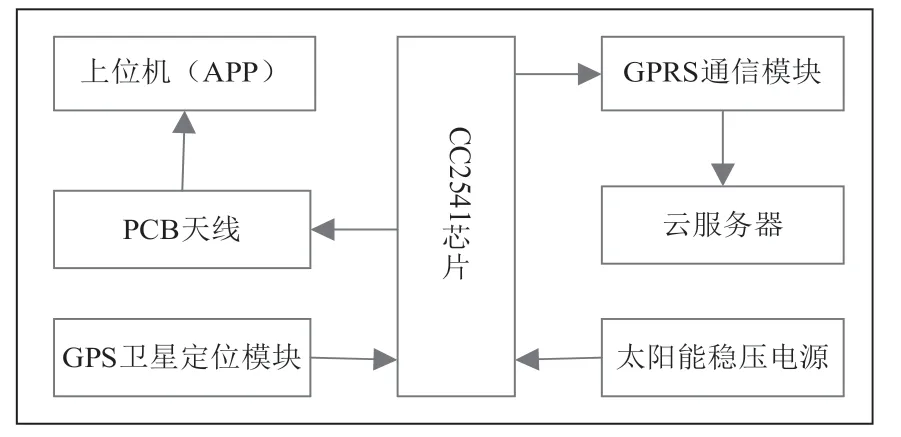
圖1 系統設計方框圖
2 系統硬件設計
本監控系統主要由衛星定位模塊、藍牙模塊、GPRS 通信模塊以及電源穩壓模塊組成。衛星定位模塊采用ZOEM8Q 芯片,支持GPS 和北斗雙模輸出,利用衛星定位當前位置和確定當前時間實現數據采集。數據傳輸則依賴于以CC2541 為核心的藍牙模塊CC2541EMV2.6,該模塊穩定性好且傳輸距離遠,它可將無人車定位等數據實時傳送到手機APP 上顯示。GPRS 通信模塊采用SIM900A 模塊,可實時上傳經緯度、海拔高、速度、日期、時間信息至云服務器,實現遠程監測。電源模塊采用3.7V 的鋰電池,并輔以太陽能穩壓充電,達到低碳環保的目的。
■2.1 藍牙CC2541 和GPRS 通信模塊設計
GPRS 通信芯片采用SMT 封裝形式,性能穩定,外觀精巧,性價比高的SIMCom 公司新型雙頻GSM/GPRS 模塊的緊湊型產品—SIM900A,并且它完全可以滿足用戶的各種需求。當模塊掉線時,系統會嘗試斷線自動重連的功能該模塊采用3.3V 供電,使用32.768K 晶振,通過PCB天線,連接到手機,有效傳輸距離10 米,并且預留SMA天線接口,增加有效信號傳輸距離,通過USB 接口可方便進行程序下載和調試。VCC_MCU 為3.3V 供電,VCC 4 采用5V 供電,綠色標注的的四根引腳SIMVCC、SIMDATE、SIMCLK 和SIMRST 接入普通SIM 卡的芯片上,實現網絡ID 身份功能;TTL 匹配電路可有效實現數據串口傳輸功能,可接入CC2541 的TXD 和RXD 上用于芯片之間的有線通信;D5 LED 為電話和短信的信號指示燈,D6 LED 為電源指示燈,外接天線位于RF 引腳上。SIM900A 電路如圖2 所示。CC2541 將增強型8051 微處理器、系統內可編程的閃存存儲器、先進的RF 收發器、8-KB 隨機存取存儲器、其它功能強大的特性和外設組合在一起,是一款真正片載系統(SoC)解決方案,主要針對低能耗以及私有2.4-GHz 應用的功率優化,非常適合應用于需要超低能耗的系統。
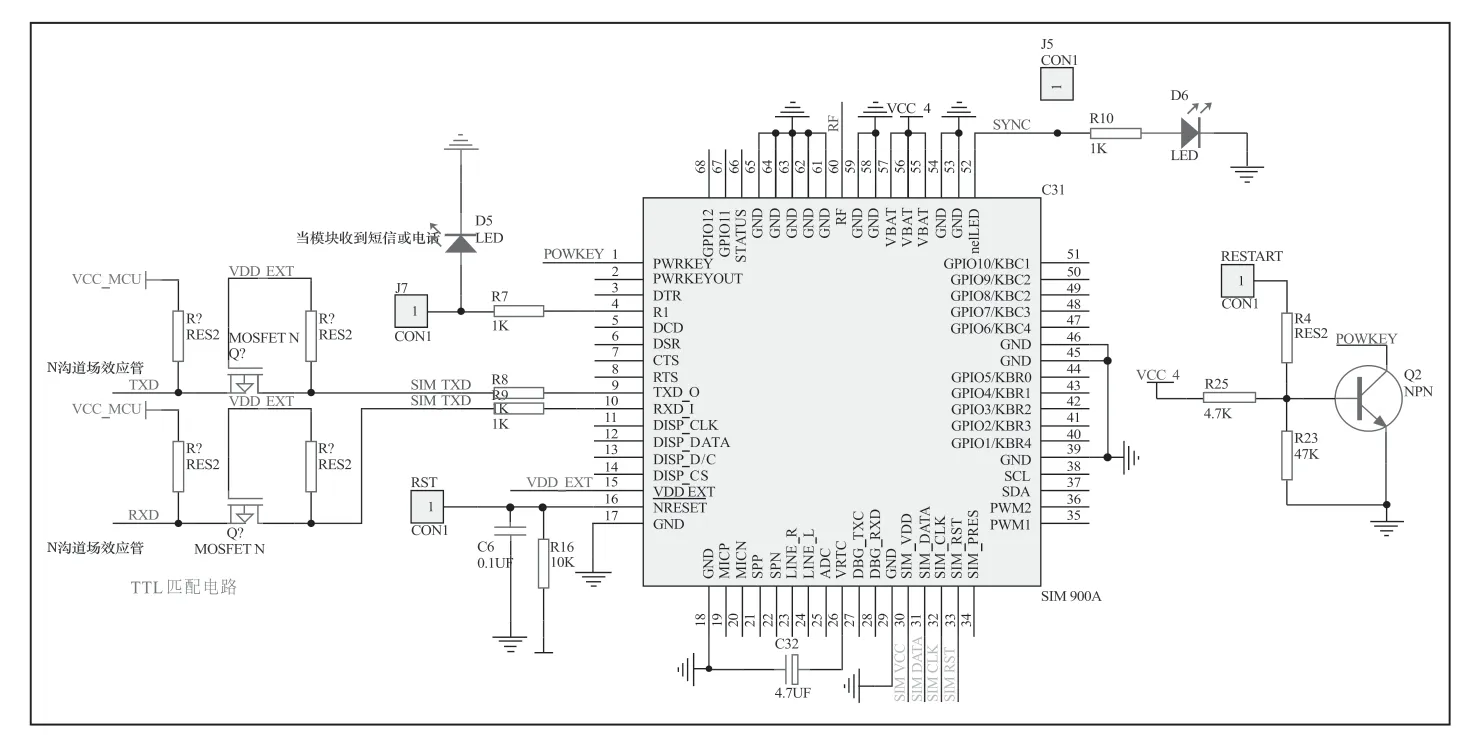
圖2 SIM900A 電路圖
■2.2 衛星定位模塊設計
衛星定位芯片選用u-blox UBX-ZOE-M8Q,它可并發接收GPS/QZSS、GLONASS、北斗,可提供先進算法和完整的GNSS 解決方案;它還為可選的外部閃存提供SQI 接口,以用來允許未來固件升級或者提高A-GNSS 的性能,能夠支持消息完整性保護、抗干擾和防欺騙,在困難的環境條件和安全攻擊場景中提供可靠的定位,從而滿足多用途工業和消費者應用中最嚴格的要求,如無人機、車輛和資產跟蹤。衛星定位模塊電路圖如圖3 所示。其主要電池供電為3.3V,備用電池在1.4V~3.6V 之間供電,J8 和J7 引腳外接晶振32.768 kHz,A4 引腳可外接陶瓷天線,J5 和J4 為串口引腳可與CC2541 連接進行芯片之間的數據通信。U-blox ZOE-M8Q 的硬件引腳名稱定義如圖4 所示,橙色為外接天線引腳,深藍色接GND 粉紅色是電源引腳,黃色為通信接口,深綠色外接晶振,青色是數字型I/O口,綠色為SQI 口,白色為預留口必須保持打開狀態。
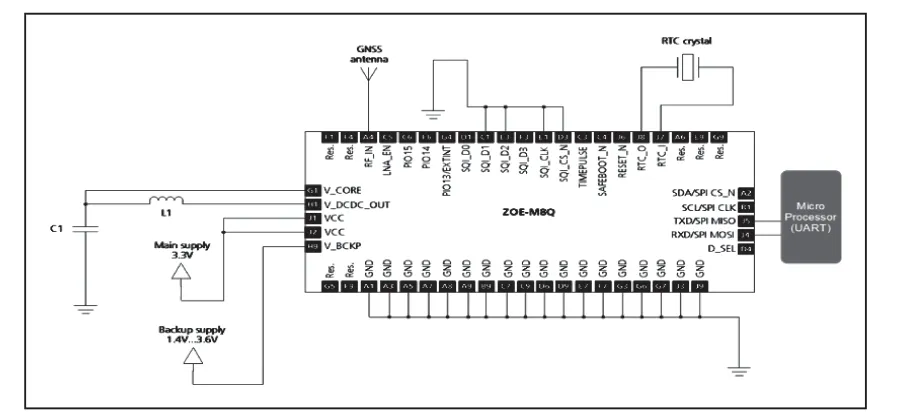
圖3 ZOE—M8Q 電路圖
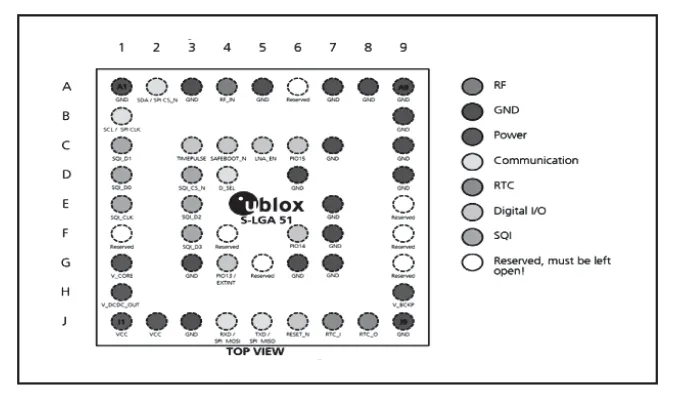
圖4 ZOE—M8Q 引腳分配
■2.3 穩壓模塊設計
太陽能穩壓采用MAX856 芯片,可輸入0.8V 至12V 電壓,選擇輸出3.3V(125mA)或者5V(100mA),還可對電池電量進行低電量檢測保護。電池充電穩壓電路采用TOP4056芯片進行設計,輸入5V 電壓,配備紅色充電指示燈和綠色充滿電指示燈,Bat+接電池正極,Bat-接電池負極,具體電路如圖5 和6 所示。
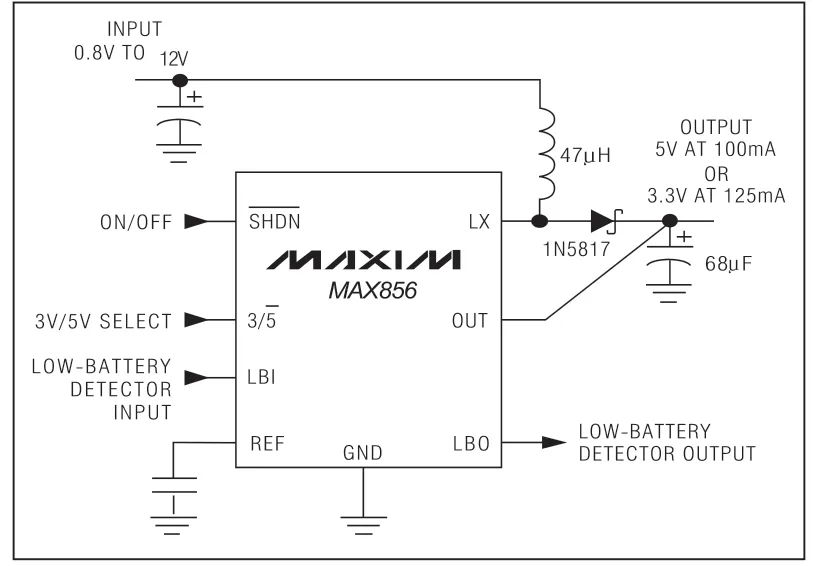
圖5 太陽能穩壓電路輸出圖
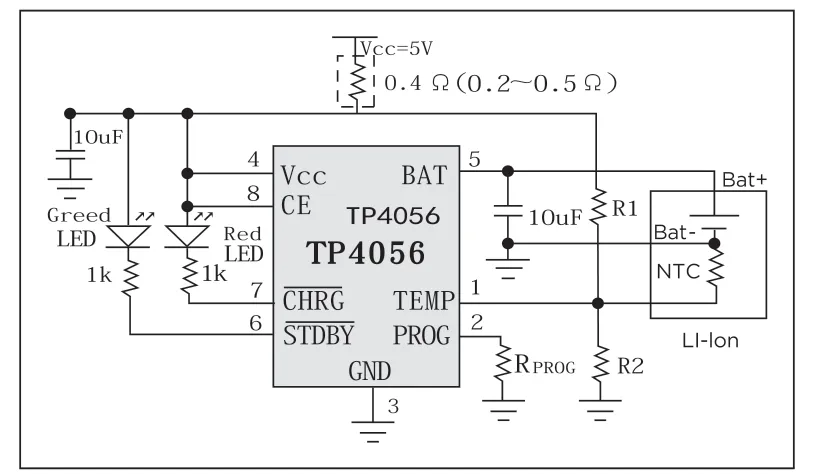
圖6 鋰電池充電電路穩壓圖
太陽能穩壓模塊指示燈,當接收到來自太陽能電池板轉化過來的能量后,該紅色指示燈常亮;衛星定位模塊電源指示燈藍色常亮,未定位情況下紅色指示燈100ms 閃爍一次,搜索到衛星成功定位情況下紅色指示燈5s 閃爍一次;鋰電池充電模塊指示燈未充滿電紅燈常亮,充滿電時綠燈常亮;GPRS 模塊紅色一號電池指示燈常亮,無信號時紅色二號指示燈常亮,有信號時1s 閃爍一次。藍牙彩色指示燈未連接時常亮變色,連接時藍色閃爍每秒一次。太陽能板模塊使用單晶硅材質制作,工作電壓為6V,額定功率為6W,尺寸小巧,質量輕薄,方便攜帶,外觀如圖7 所示。
圖7 太陽能電池板
3 軟件總體設計與系統調試
衛星定位模塊將采集到的數據包括經緯度、高程、時間、精度等傳送給CC2541,CC2541 將接收到的數據進行處理后并壓縮,通過藍牙協議傳送給用戶手機上的APP Laptimer,利用Lua 語言自主編寫APP 腳本將接收到的數據進行解壓和存儲,并提供給顯示界面,顯示用戶可讀的數據;并通過串口將數據傳送給SIM900A 芯片上,其使用GPRA 技術將數據傳送至云服務器,服務器再將數據進行處理和存儲,實現遠端監測,具體流程如圖8 所示。
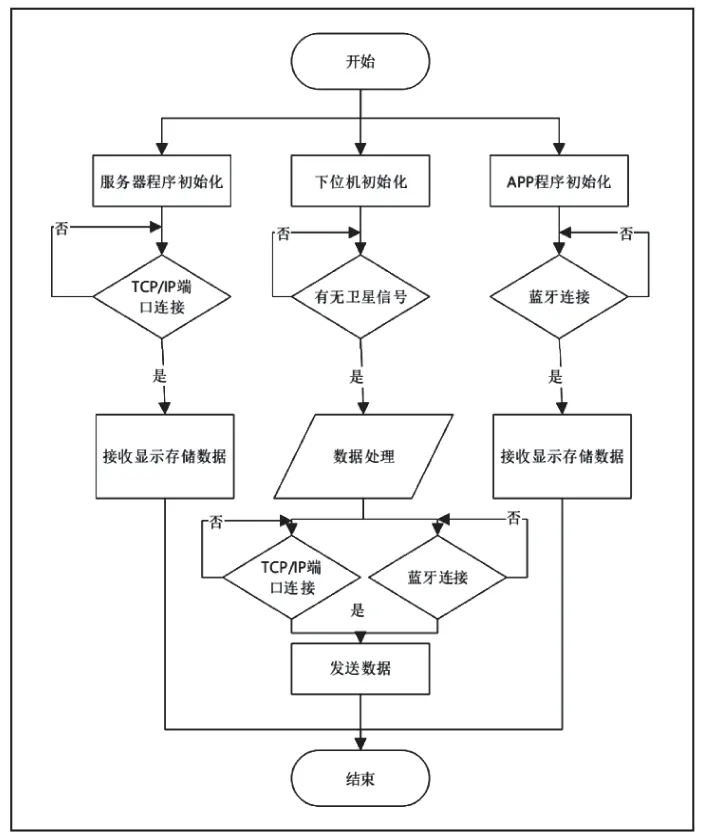
圖8 軟件總體框圖
云端服務器開機后運行Windows Server 2012RC 操作系統,使用之前配置好的固定的公網IP 地址,設置好入站出站的規則,如選擇服務器端口“3388”進行開放測試;運行網絡端口監測程序,設置網絡的協議類型為TCP 服務,監測本地計算機端口“3388”是否有數據客戶端請求接入,沒有就等待接入請求,有接入請求后記錄顯示客戶端的IP地址和網絡端口號,判斷端口如果有數據過來就顯示終端發送過來的數據,并自動保存日期時間。
下位機程序流程下位機供電后,各模塊開始初始化,CC2541 工作后首先開始設置自己的藍牙名稱為:WHL,服務UUID:FFF9 和特征UUID:FFF6;判斷自己是否通過藍牙連接到手機APP,連接后指示燈1s 閃爍一次;衛星定位模塊與GPRS 模塊判斷是否接受衛星信號成功和是否能連接到基站網絡,分別顯示不同狀態的指示燈;衛星定位成功后將RMC 數據包和GGA 數據包發給CC2541,其處理壓縮后通過藍牙發給手機APP,再通過串口控制SIM900A 模塊將衛星定位系統采集到的數據上傳至云端服務器。
衛星定位系統由ALIENTEK STM32F4 探索者首先進行采集開發調試,實現對經緯度、海拔高度、速度、定位衛星的數據、方向角、精度的實時顯示,并將UNIX 時間戳轉化為標準時間值,方便用戶觀看。SIM900A 模塊,通過插入手機流量卡,接入附近基站網絡;通過GPRS 技術,由基站向遠程服務器建立TCP/IP 連接,將海量數據上傳至云端。系統選用騰訊云端服務器WINDOWS SERVER 2012RC 操作系統,使用校內電腦,經TCP/IP 連接至云端服務器,并向云端發送數據,云端接檢測到有IP 連接請求時響應相應程序,檢測對方IP 地址及端口數據變化,記錄時間值,顯示接收到的數據;從云端服務器向學校電腦端口發送數據,以達到對下位機命令控制請求。利用C/S 架構或者B/S 架構,調試中接入實時衛星數據,調用Google 地圖、百度地圖、高德地圖等的API,可以輕松獲得衛星地圖數據在WEB 等界面顯示,也可在APP 或服務器地圖中顯示監控系統的坐標衛星監控系統衛星地圖顯示。
4 結束語
該衛星出行系統可對載體(無人汽車,無人機等)經緯度、行駛速度、時間、里程以及其他狀態信息進行記錄、存儲,通過藍牙和GPRS 等無線技術實現數據輸出給客戶端(APP)和云端服務器,同時實現了太陽能發電節能減排、云端服務器存儲和大數據處理,功能豐富,應用前景廣。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32