基于六軸慣導(dǎo)的電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判
2022-05-24 11:44:16王賢強(qiáng)劉軍張正祥胡云輝
電子設(shè)計(jì)工程 2022年10期
王賢強(qiáng),劉軍,張正祥,胡云輝
(國(guó)網(wǎng)安徽省電力公司合肥供電公司,安徽 合肥 230000)
目前,民用電量和工業(yè)用電量急劇增多,給電力系統(tǒng)帶來(lái)了較大的壓力,同時(shí)也為電力系統(tǒng)提供了新的發(fā)展機(jī)遇[1]。電力系統(tǒng)的安全運(yùn)行是保證電網(wǎng)穩(wěn)定的重要前提,早期對(duì)電網(wǎng)系統(tǒng)的檢查主要依賴(lài)于人工,工作人員使用特定的環(huán)境監(jiān)控設(shè)備定期對(duì)電網(wǎng)進(jìn)行巡檢,以此保障電網(wǎng)的安全運(yùn)行。隨著用電量的成倍增加,電網(wǎng)供電范圍的擴(kuò)大,早期的人工巡檢方法工作效率低、危險(xiǎn)性高,易出現(xiàn)錯(cuò)檢、漏檢的情況,巡檢工作逐漸被機(jī)器人取代[2-4]。針對(duì)電網(wǎng)特殊的工作環(huán)境,機(jī)器人代替人工巡檢的方法更加安全可靠,且實(shí)時(shí)性強(qiáng),是未來(lái)電網(wǎng)帶電運(yùn)維無(wú)人化的趨勢(shì)和研究熱點(diǎn)[5]。
國(guó)外對(duì)帶電作業(yè)機(jī)器人的研究比較早,運(yùn)維機(jī)器人作為移動(dòng)機(jī)器人的一種,其研究在80 年代末已經(jīng)取得了一定的成果,進(jìn)入21 世紀(jì)后,國(guó)外的一些學(xué)者已經(jīng)開(kāi)發(fā)出運(yùn)維機(jī)器人的樣機(jī),且對(duì)機(jī)器人的行為導(dǎo)航技術(shù)也有一定的研究成果[6]。傳統(tǒng)的機(jī)器人作業(yè)位置預(yù)判方法只能單自由度地控制機(jī)器人機(jī)械臂識(shí)別周?chē)h(huán)境,部分角度的環(huán)境信息缺失,使預(yù)判位置存在一定的位置誤差和航向角度誤差[7]。針對(duì)這一問(wèn)題,該文提出了基于六軸慣導(dǎo)的電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判方法,解決了傳統(tǒng)方法中存在的問(wèn)題。
1 機(jī)器人作業(yè)位置預(yù)判方法設(shè)計(jì)
1.1 運(yùn)維環(huán)境溫度誤差
利用六軸慣導(dǎo)控制機(jī)器臂末端的手持慣導(dǎo)設(shè)備軌跡,獲取以機(jī)器人為中心的周?chē)h(huán)境特征,為機(jī)器人作業(yè)位置的預(yù)判做準(zhǔn)備。使用六軸慣導(dǎo)為帶電作業(yè)機(jī)器人的控制核心,其設(shè)計(jì)的控制模塊主要包括手持慣導(dǎo)設(shè)備、機(jī)器人空間機(jī)械臂和機(jī)械臂控制器,其中手持慣導(dǎo)設(shè)備采集操作員手部動(dòng)作,將手部動(dòng)作數(shù)據(jù)通過(guò)無(wú)線網(wǎng)絡(luò)傳輸?shù)綑C(jī)械臂控制器。六軸慣導(dǎo)控制結(jié)構(gòu)如圖1 所示。
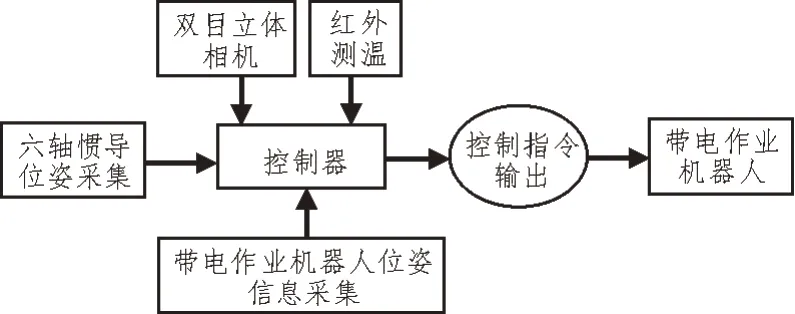
圖1 六軸慣導(dǎo)控制結(jié)構(gòu)
在實(shí)際的電網(wǎng)帶電運(yùn)維過(guò)程中,機(jī)器人通過(guò)云臺(tái)被推送到作業(yè)高空,工作人員操作機(jī)器臂和環(huán)境感知部件感知周?chē)h(huán)境,傳輸環(huán)境數(shù)據(jù),完成作業(yè)任務(wù)[8]。在云臺(tái)上,雙目立體相機(jī)實(shí)時(shí)將環(huán)境感知部件采集的圖像數(shù)據(jù)通過(guò)無(wú)線網(wǎng)絡(luò)傳輸?shù)降孛妗C(jī)器臂操作控制器通過(guò)操作員手部操作,自動(dòng)規(guī)劃各自由度的運(yùn)行軌跡,驅(qū)動(dòng)機(jī)械臂運(yùn)動(dòng),從而使機(jī)器臂調(diào)整到操作員期望的空間角度,獲取周?chē)暾沫h(huán)境信息[9-10]。
在獲取圖像的同時(shí),使用紅外測(cè)溫功能,識(shí)別周?chē)h(huán)境溫度異常的物體。在電網(wǎng)系統(tǒng)中,很多設(shè)備零件內(nèi)部存在熱運(yùn)動(dòng),符合黑體輻射定律[11]。根據(jù)黑體輻射定律:
式中,α1和α2表示輻射常數(shù),β表示光譜輻射波長(zhǎng),T表示絕對(duì)溫度,P表示能量密度。
結(jié)合上述公式可知紅外測(cè)溫的原理,輻射能力越強(qiáng)的物體代表其溫度也越高[12-13]。帶電運(yùn)維機(jī)器人上裝有紅外熱像儀,利用紅外熱像儀上的探測(cè)器聚焦設(shè)備零件的局部區(qū)域熱度,從而將溫度數(shù)據(jù)傳輸至顯示界面,獲得已知的溫度數(shù)據(jù)。
根據(jù)已知的溫度數(shù)據(jù)進(jìn)行診斷時(shí),針對(duì)不同的情況,考慮溫升、溫差和相對(duì)溫差3 個(gè)關(guān)鍵因素[14]。相對(duì)誤差是根據(jù)相應(yīng)的兩個(gè)測(cè)點(diǎn)之間的溫差與其中較熱點(diǎn)的溫升之比的百分?jǐn)?shù)獲得[14]。公式如下:

式中,κ1表示發(fā)熱點(diǎn)的溫升,κ2為正常相對(duì)應(yīng)點(diǎn)的溫升,g0表示環(huán)境參照體的溫度,g1和g2分別表示發(fā)熱點(diǎn)和正常相對(duì)應(yīng)點(diǎn)的溫度。根據(jù)電網(wǎng)線路的溫度診斷,明確機(jī)器人運(yùn)維環(huán)境,避免由溫度引起的運(yùn)維誤差。
1.2 運(yùn)維環(huán)境特征模型構(gòu)建
通過(guò)上述過(guò)程獲得周?chē)h(huán)境特征,從而對(duì)機(jī)器人作業(yè)位置進(jìn)行預(yù)判[15]。通過(guò)環(huán)境感知部件獲得一定的距離數(shù)據(jù),距離數(shù)據(jù)所呈現(xiàn)的特征就是觀測(cè)到的環(huán)境特征。在環(huán)境感知部件工作時(shí),受到外界因素的影響,距離數(shù)據(jù)中存在部分噪聲,不能直接獲取到完美直線。針對(duì)這一問(wèn)題,引用約束規(guī)則,將屬于同一直線的距離點(diǎn)歸并,獲得完美的環(huán)境特征直線。用極坐標(biāo)r=(θ,λ) 表示距離點(diǎn),直線由模型參數(shù)(d,γ)描述,d表示機(jī)器人到直線的距離,γ表示d到機(jī)器人坐標(biāo)橫軸的夾角。該直線特征作為機(jī)器人位置估計(jì)的觀測(cè),觀測(cè)模型可以用下式表示:

式中,Ma表示在機(jī)器人極坐標(biāo)下a時(shí)刻的觀測(cè)模型,通過(guò)觀測(cè)模型可獲得環(huán)境地圖中的特征。
1.3 機(jī)器人作業(yè)位置預(yù)判
假設(shè)帶電運(yùn)維機(jī)器人從已知的位置出發(fā),通過(guò)機(jī)器人上的運(yùn)動(dòng)感受傳感器達(dá)到獲取機(jī)器人行動(dòng)信息的目的,將收集到的多種行動(dòng)信息集成為控制輸入數(shù)據(jù),通過(guò)這些輸入數(shù)據(jù)達(dá)到跟蹤機(jī)器人位置的目的[16]。需要注意的是,傳感器測(cè)量的數(shù)據(jù)并不能完美地代替機(jī)器人實(shí)際執(zhí)行的動(dòng)作,在測(cè)量過(guò)程中存在部分誤差,被引入到后續(xù)操作中,給機(jī)器人作業(yè)位置預(yù)判帶來(lái)了誤差。因此,建立機(jī)器人的位置預(yù)測(cè)模型,以預(yù)測(cè)機(jī)器人的作業(yè)位置。
利用IMU(慣性測(cè)量單元)獲取機(jī)器人的絕對(duì)航向信息,利用里程計(jì)和IMU 實(shí)現(xiàn)機(jī)器人在起始點(diǎn)的初始位置對(duì)準(zhǔn):

式中,W0表示機(jī)器人的初始位置。根據(jù)機(jī)器人的運(yùn)動(dòng)學(xué)模型,得到機(jī)器人位置更新的基本方程:
式中,v表示機(jī)器人的線速度,W表示前一時(shí)刻位置的估計(jì)數(shù)據(jù),ω表示機(jī)器人移動(dòng)的旋轉(zhuǎn)角速度,W'表示后一時(shí)刻位置的估計(jì)數(shù)據(jù)。通過(guò)初始位置和更新位置獲得預(yù)測(cè)直線。在對(duì)電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判時(shí),將通過(guò)觀測(cè)模型獲得的觀測(cè)直線及通過(guò)IMU 得到的預(yù)測(cè)直線相匹配,將預(yù)測(cè)直線數(shù)據(jù)組成預(yù)測(cè)子集,觀測(cè)子集則由環(huán)境感知數(shù)據(jù)組成。為了保證匹配過(guò)程中預(yù)測(cè)和觀測(cè)的數(shù)據(jù)一一對(duì)應(yīng),避免出現(xiàn)一對(duì)多或多對(duì)一的異常情況,將觀測(cè)直線和預(yù)測(cè)直線都關(guān)聯(lián)同一個(gè)環(huán)境特征。同時(shí)建立一個(gè)預(yù)測(cè)和觀測(cè)之間的修正量ξij,更好地找到觀測(cè)之間預(yù)測(cè)的配對(duì)。

式中,(v·t)ja表示a時(shí)刻的觀測(cè),(v·t)'ia表示a時(shí)刻的預(yù)測(cè)。為了判斷特征預(yù)測(cè)和觀測(cè)之間匹配是否有效,給出匹配的判定門(mén)限:

其中,G表示預(yù)測(cè)和觀測(cè)之間匹配的門(mén)限閾值。在預(yù)測(cè)子集和觀測(cè)子集匹配過(guò)程中,通過(guò)式(9)的判定條件判斷一個(gè)觀測(cè)與各個(gè)預(yù)測(cè)之間的關(guān)系。在真實(shí)的作業(yè)過(guò)程中,只有一個(gè)觀測(cè)結(jié)果落在一個(gè)判定門(mén)限才是有效的。若出現(xiàn)一個(gè)觀測(cè)對(duì)應(yīng)多個(gè)判定門(mén)限,則通過(guò)計(jì)算和多次匹配,篩選出最佳的配對(duì)作為有效配對(duì)。對(duì)于匹配過(guò)程中沒(méi)有落入判定門(mén)限的觀測(cè),則直接棄置,僅利用預(yù)測(cè)來(lái)估計(jì)機(jī)器人的作業(yè)位置。
在電網(wǎng)帶電運(yùn)維過(guò)程中,其機(jī)器人作業(yè)環(huán)境基本相似,環(huán)境特征相似度較高,為了避免落入多個(gè)判定門(mén)限的情況,選擇環(huán)境特征差異較大的區(qū)域。
至此,基于六軸慣導(dǎo)的電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)預(yù)判方法設(shè)計(jì)完成。
2 實(shí)驗(yàn)結(jié)果與分析
在電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判實(shí)驗(yàn)研究中,主要引用傳統(tǒng)的預(yù)判方法進(jìn)行對(duì)比實(shí)驗(yàn),實(shí)驗(yàn)所用的機(jī)器人如圖2 所示。

圖2 實(shí)驗(yàn)機(jī)器人
為減少自然環(huán)境的干擾,定位實(shí)驗(yàn)在室內(nèi)進(jìn)行,分別使用基于六軸慣導(dǎo)的電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判方法和文獻(xiàn)[7]提出的巡線機(jī)器人輸電線路狀態(tài)檢修方法進(jìn)行對(duì)比實(shí)驗(yàn),使用第三方軟件Rviz輸出結(jié)果,通過(guò)仿真結(jié)果能夠明顯看出不同預(yù)判方法的對(duì)比效果。
圖3顯示的a、b、c、d 4個(gè)點(diǎn)為預(yù)判點(diǎn),圖中的軌跡為機(jī)器人行動(dòng)軌跡。從圖中可以看出,傳統(tǒng)預(yù)判方法預(yù)判的位置與機(jī)器人實(shí)際行動(dòng)軌跡相比,出現(xiàn)了嚴(yán)重的偏離,而該文方法預(yù)判的位置與機(jī)器人實(shí)際行動(dòng)軌跡十分貼切。統(tǒng)計(jì)出兩組實(shí)驗(yàn)結(jié)果的位置誤差和航向角誤差,使用不同的預(yù)判方法進(jìn)行多次實(shí)驗(yàn),利用統(tǒng)計(jì)軟件SPSS 統(tǒng)計(jì)位置誤差和航向角誤差。具體統(tǒng)計(jì)結(jié)果如表1 所示。
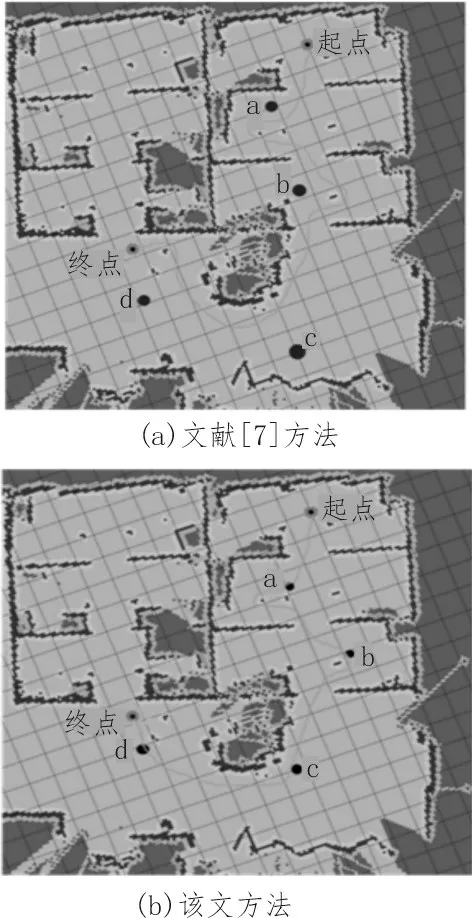
圖3 不同預(yù)判方法位置預(yù)判實(shí)驗(yàn)結(jié)果
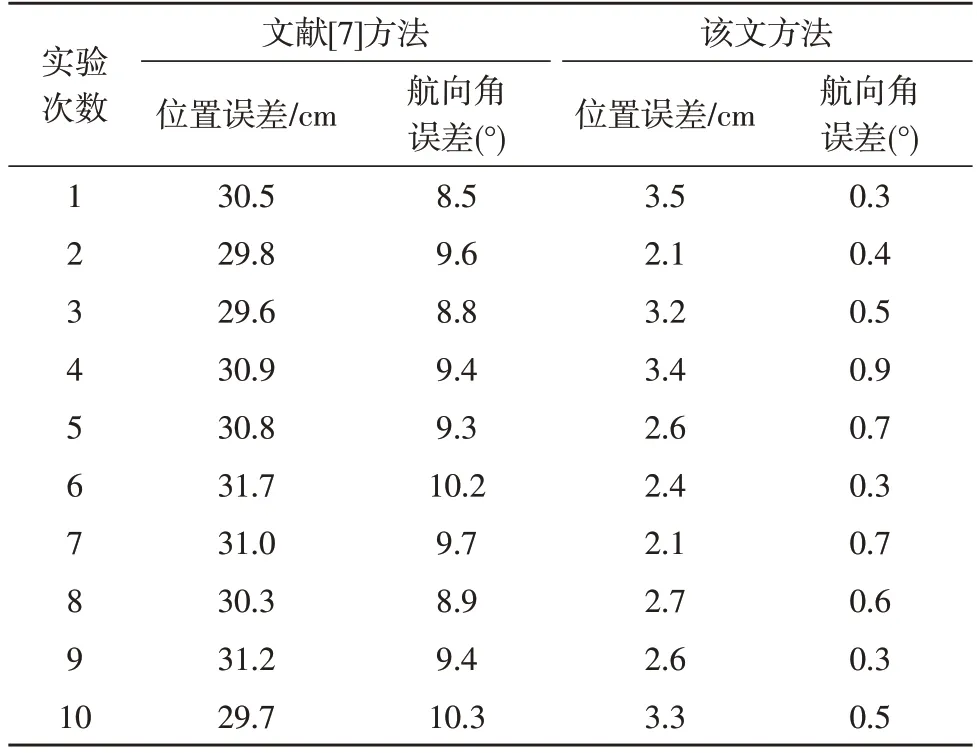
表1 不同預(yù)判方法誤差統(tǒng)計(jì)結(jié)果
由表1 可知,文獻(xiàn)[7]提出的巡線機(jī)器人輸電線路狀態(tài)檢修方法平均位置誤差為30.55 cm,航向角誤差為9.41°;基于六軸慣導(dǎo)的預(yù)判方法平均位置誤差為2.79 cm,航向角誤差為0.52°。對(duì)比以上數(shù)據(jù),可以明顯看出傳統(tǒng)的預(yù)判方法位置誤差遠(yuǎn)高于基于六軸慣導(dǎo)的電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判方法,說(shuō)明設(shè)計(jì)的預(yù)判方法優(yōu)于傳統(tǒng)預(yù)判方法。
3 結(jié)束語(yǔ)
機(jī)器人在電網(wǎng)帶電運(yùn)維中承擔(dān)著電力巡檢的任務(wù),通過(guò)對(duì)作業(yè)位置的預(yù)判,完成預(yù)定的作業(yè)任務(wù)并實(shí)時(shí)上報(bào)。通過(guò)引用六軸慣導(dǎo)控制機(jī)器人的行為,利用機(jī)器臂獲取機(jī)器人周?chē)h(huán)境信息,依據(jù)環(huán)境信息及物件溫度變化預(yù)判出機(jī)器人作業(yè)位置。針對(duì)不同預(yù)判方法,設(shè)計(jì)對(duì)比實(shí)驗(yàn),在相同的實(shí)驗(yàn)條件下,證明了設(shè)計(jì)的基于六軸慣導(dǎo)的電網(wǎng)帶電運(yùn)維機(jī)器人作業(yè)位置預(yù)判方法更加優(yōu)秀。但是所提方法仍然存在一些問(wèn)題,由于實(shí)驗(yàn)過(guò)程數(shù)據(jù)主要依靠人工測(cè)量,定位精度不足,下一步研究工作可以圍繞這一問(wèn)題展開(kāi)。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
故事大王(2016年7期)2016-09-22 17:30:08
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
兒童故事畫(huà)報(bào)(2013年3期)2013-06-24 05:40:30

- 電子設(shè)計(jì)工程的其它文章
- 基于移動(dòng)終端的馬匹競(jìng)拍APP 設(shè)計(jì)與實(shí)現(xiàn)
- 基于非正交多址接入的無(wú)線通信網(wǎng)絡(luò)吞吐量?jī)?yōu)化
- 基于卷積神經(jīng)網(wǎng)絡(luò)的海洋生物圖像分類(lèi)方法研究
- 基于改進(jìn)YOLO V4 的橋梁纜索表面損傷識(shí)別方法
- 基于改進(jìn)小波閾值的低壓電網(wǎng)繼電保護(hù)輸入信號(hào)辨識(shí)系統(tǒng)設(shè)計(jì)
- 基于大數(shù)據(jù)的電力調(diào)度運(yùn)行安全風(fēng)險(xiǎn)預(yù)警算法研究