自平衡式新型智能輪椅的設計與實現
2022-05-24 07:51:27丁哲文王廷軍*張嘉豪李浩羅宗仁戴辰偉劉世杰
科技風 2022年12期
丁哲文 王廷軍* 張嘉豪 李 浩 羅宗仁 戴辰偉 劉世杰



摘要:在一般城市道路,輪椅使用者不免會遇到上下坡的情況,輪椅使用者易發生后仰或者向前翻的安全問題,為了實現輪椅使用者在上坡、下坡過程中保持身體水平,提高輪椅使用的安全性及舒適性,設計了一種基于大慣量輪的座位姿態自平衡輪椅。包括輪椅框架、座位、磁力鎖、電機保護棘輪、大慣量輪座位姿態自平衡機構和兩輪椅輪。根據其基本構造和基本原理,給出了能夠實現自平衡式新型智能輪椅運作的方案和步驟,并通過實驗證實了其實用性。本文主要對自平衡式新型智能輪椅的機械構造、控制原理和大慣量輪的原理進行分析研究和設計。分析了能夠實現座位姿態自平衡的原理及要求,包括利用Arduino和角度傳感器實現智能坡面控速和座位姿態檢測和水平調節。
關鍵詞:自平衡;大慣量輪;角度傳感器;Arduino;磁力鎖;棘輪
Design?and?Application?of?Intelligent?wheelchair
Ding?Zhewen???Wang?Tingjun*???Zhang?Jiahao??Li?Hao??Luo?Zongren??Dai?Chenwei??Liu?Shijie
School?of?Mechanical?Engineering,?Shanghai?Dianji?University???Shanghai??201306
Abstract:?In?general?urban?roads,?wheelchair?users?will?inevitably?encounter?uphill?and?downhill?situations,?and?wheelchair?users?are?prone?to?the?safety?problem?of?leaning?back?or?turning?forward.?In?order?to?maintain?the?physical?level?of?wheelchair?users?during?uphill?and?downhill,?and?improve?the?safety?and?comfort?of?wheelchair?use,?a?seat?posture?self?balancing?Wheelchair?Based?on?large?inertia?wheel?is?designed.?It?includes?wheelchair?frame,?seat,?magnetic?lock,?motor?protection?ratchet,?large?inertia?wheel,?seat?attitude?self?balancing?mechanism?and?two?wheel?chair?wheel.?According?to?its?basic?structure?and?principle,?the?scheme?and?steps?of?realizing?the?operation?of?a?new?self?balancing?intelligent?wheelchair?are?given,?and?its?practicability?is?verified?by?experiments.?This?paper?mainly?analyzes,?studies?and?designs?the?mechanical?structure,?control?principle?and?the?principle?of?large?inertia?wheel?of?the?new?self?balancing?intelligent?wheelchair.?The?principle?and?requirements?of?seat?attitude?self?balance?are?analyzed,?including?intelligent?slope?speed?control,?seat?attitude?detection?and?level?adjustment?by?using?Arduino?and?angle?sensor.
Keywords:?Self?balance;Large?inertia?wheel;Angle?sensor;Arduino;magnetic?lock;?ratchet
1概述
隨著時代的發展,對于輪椅使用者的關注度愈發增高,安全帶的方式大大降低了輪椅使用者的舒適度,類似的可調節姿態的輪椅也有著缺陷:(1)調節姿態時間過長,遇長、陡坡不能及時調整座位姿態;(2)僅使用控制裝置調節需要短期經常維護。人口老齡化是當今世界發展的一個重要趨勢,2012年年初全國老齡辦發布的《中國人口老齡化發展趨勢預測研究報告》顯示,目前我國60歲以上的老年人口已達1.43?億,“十二五”時期,我國將出現第一個老年人口增長高峰,60歲以上老年人將由?1.78?億增加到?2.21?億,并且預計到?2050?年,老年人口總量將超過4億。隨著人口老齡化程度的不斷加深,龐大的老年群體也造就了潛在的巨大市場。據統計,2012?年將達到?1?萬億元,預計2020年達到2萬億元。人口老齡化進程將加快,急劇增長的社會養老需求與老齡事業發展的矛盾日益突出。據調查,我國輪椅行業未來幾年產量將保持1.1倍以上的增速,產量2013-19年由312萬臺增至535萬臺,同年電動和手動類型存量分別為715萬,1400萬臺。可以看出手動輪椅的存量遠大于電動的,因此輪椅電動化已經有了一定的市場需求,
我國每年因為輪椅在坡道上失去平衡而發生的事故不在少數,對人身造成了極大的傷害,關于輪椅使用者的出門便利這一社會問題已愈發嚴重,因為空間的限制下,改造坡道不切實際,耗費大量人力物力。傳統的輪椅需要輪椅使用者通過安全帶的形式保證輪椅使用者在下坡時不發生下滑,這種形式存在一定的安全隱患,且降低了舒適性。因此,針對以上情況,需要研發一種能解決以上問題的的裝置,使輪椅使用者一直處于平衡狀態。本文利用了傳感器技術、大慣量輪,提出了一種基于大慣量輪通過多種傳感器協助完成自平衡的輪椅。
本項目設計的智能輪椅中關鍵技術可經過技術迭代,適配于已有的傳統輪椅,達到本項目設計智能輪椅的核心功能,具有更為廣闊且穩定的市場。
2工作原理與結構設計
本設計采用Ardunio開發板實現控制,大慣量輪傳動模塊實現輪椅座位部分的平衡。?整個系統的核心為借助加速度傳感器與實現座位平衡以及利用自身前進動力的機械部分。
大慣量輪普遍用于幫助機構度過死點,用在此處,是利用了陀螺效應,工作原理類似于陀螺儀[1]?,重力對于高速旋轉中的陀螺產生的對支撐點的力矩不會使其發生傾倒,軸的方向不會隨外力的方向發生改變。
2.1傳動機構
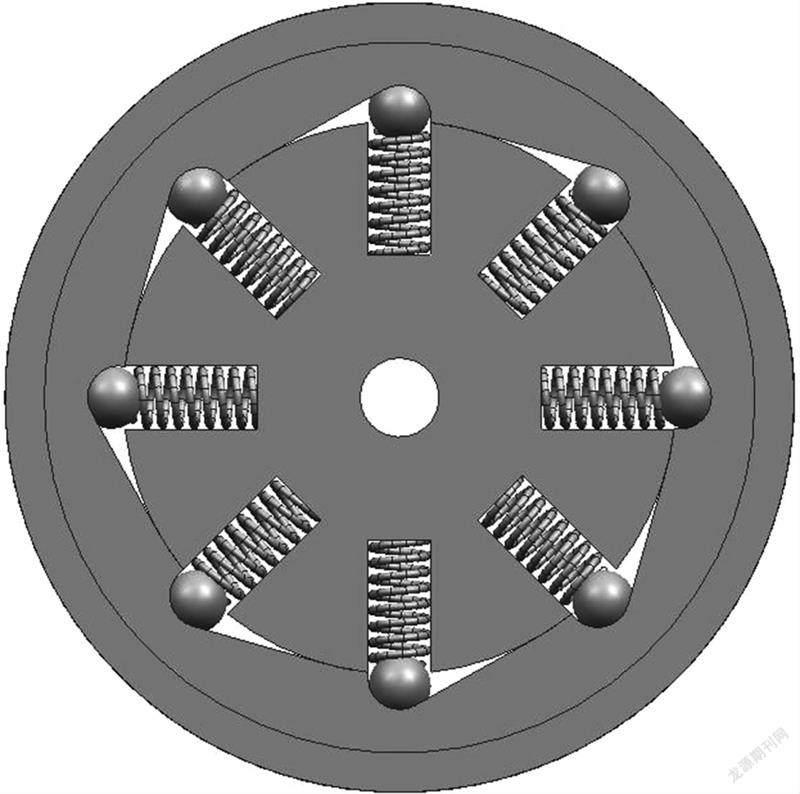
傳動機構如圖2所示,由兩部分組成,其中上半部分為大慣量輪部分(以下簡稱A)、下半部分為傳動機構(以下簡稱B)。A利用陀螺儀原理使座位維持水平狀態,B將輪椅輪子轉動的動力經過傳動軸Ⅰ-鏈條-傳動軸Ⅱ-傘齒輪-錐齒輪-棘輪-大慣量輪。
結構簡單、穩定、安全性高、成本低、節約能源,可不完全依靠電池提供的能源帶動電機。與慣量輪部分設置棘輪,單向傳遞動力。
在此機械結構的基礎上,可使用電機給大慣量輪提供動力,短時間內即可達到自平衡的效果。
兩傳動軸分為主動軸和從動棒軸,兩軸裝配手時應保持平行,其中,主動軸一端通過軸承固定軸向方向,另一端與車輪軸連接,從動軸兩端都通過軸承固定軸向方向,兩軸通過軸上的鏈輪、鏈條傳遞動力,從動軸中間部分裝有傘齒輪,傘齒輪與大慣量裝置底部的錐齒輪連接,在錐齒輪與大慣量輪中間設置的棘輪可以防止大慣量輪反向帶動車輪。選用周圍質量大,中間薄的鏤空圓盤座位慣量輪主體,高速轉動帶來的巨大離心力會有脫離的可能,慣量輪的軸應當使用可靠的固定方式與轉動軸固定。慣量輪的圓柱度應當在0.02mm上下,才能保證穩定的轉動。
座椅底部固定的支撐桿可以使座椅繞桿在輪椅前進方向自由旋轉。且設置了前后兩根限位桿,限制了座椅的最大轉動角度,空間上不會與大慣量輪的轉動發生干涉。限位桿的設計可結合使用者當地道路坡度。
2.2傳感器設置
采用三軸加速度傳感器(通過三軸坐標判斷各軸加速度)來獲取輪椅當前姿態。當輪椅處于水平路面時,由三軸加速度傳感器控制的磁力鎖使座位無法轉動,因為在水平路面座位無需轉動;當輪椅的角度發生改變時,傳感器檢測到未處于水平狀態,磁力鎖不工作,座椅可自由轉動,大慣量輪使座椅維持在水平狀態。手機可直接通過藍牙連接傳感器查看加速度、角度數據;可設置傳感器“加記標準”(將加速度和角度值歸零)和“平滑系數”(控制數據輸出數據的濾波1~1000,值越大濾波越大)。
除了三軸加速度傳感器以外,可在座位上安裝壓力傳感器,檢測輪椅上是否有人以啟動自平衡模塊。完善流程。GPS定位系統可及時獲悉輪椅使用者位置。
3控制系統設計
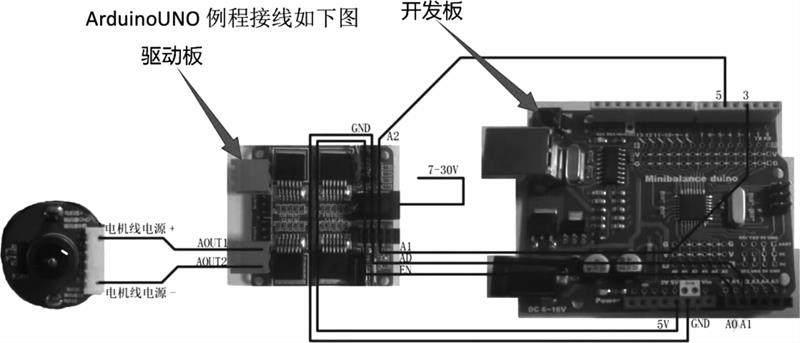
整體系統基于Ardunio開發板,有著十四個數字輸入/輸出引腳(其中六個可用作PWM輸出),只需用數據線將其連接到計算機即可寫入程序或者使用電池即可為其供電并開始使用。
當飛輪轉速過低時可使用電機帶動飛輪,此處使用了BTN單/雙路電機驅動模塊增加隔離芯片74LS244,提高信號驅動能力,同時隔離BTN?芯片和單片機,保護BTN和單片機芯片;增加?LM2596_5.0電源芯片,為隔離芯片?74LS244?提供電源,也可為外部提供5V?輸出。
線路可布置在輪椅機構空心部分內,避免線路裸露的安全隱患及達到一定的防水防塵級別。
結語
基于大慣量輪的座位姿態自平衡輪椅具有良好的應用前景。使用Ardunio開發板串聯了多種傳感器以及對電機的控制,機械式傳動結構和也能在無外界電源情況下完成輪椅座位的自平衡。在機械結構傳動的機構上增添了多種模塊,能更好的完善自平衡這一功能。
參考文獻:
[1]國家統計局官網.
[2]劉延柱.?“魚鷹”飛機的陀螺效應[J].?力學與實踐,2012,34(4):102-103.
項目:本項目獲得2021年“上海市大學生創新創業訓練計劃項目”資助
*通訊作者:王廷軍(1966—??),男,博士,教授,研究方向為機器人技術。
